 基于TI DLP驱动的结构光技术实现提高箱拣的精确性
基于TI DLP驱动的结构光技术实现提高箱拣的精确性

在工业环境中,每天需要处理不同形状、尺寸、材料和光学特性(如反射比、吸收等)的零件。这些零件必须以特定的方向挑选和放置,然后进行加工。将这些零件随机从存放的环境(容器或其他)中自动挑选并放置的活动通常被称为箱拣。但这对机器人末端执行器(一种连接到机械臂末端的设备)提出了挑战,它需要准确地知道要抓取物体的3D位置、尺寸及其想方向。为了做到在箱子外壁和箱内其他物体周围准确导航,机器人的机器视觉系统除了需要获取2D相机信息外,还需要获取深度信息。
对于箱拣来说,捕获物体3D影像的难题可以由结构光技术解决。基于结构光技术的3D扫描仪/相机通过将一系列图案投射到被扫描的物体上而工作,并且用相机或传感器来捕获图案失真。然后三角剖分算法计算数据并输出3D点云。图像处理软件(如MVTech开发的Halcon)计算物体位置和机械臂的最佳进场路线(图1)。
图1:使用Halcon将管接头与其各自的3D模型进行匹配的示例(来源:MVTech开发的Halcon)
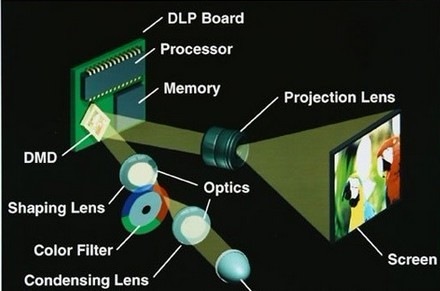
DLP技术通过安装在半导体芯片顶部的微镜矩阵(也称为数字微镜器件,DMD)提供高速图案投射能力,如图2所示。DMD上的每个像素表示投影图像中的一个像素,并允许像素精确图像投影。微镜在~ 3us时可以转换,以通过投影透镜将入射光反射到物体上或光块上。前者可以在投影场景中获得明亮像素,而后者可以创建暗像素。DLP技术也具备独特的优势,能够使用各种光源(如灯、LED和激光)在宽波长范围(420 nm – 2500 nm)内投射图案。
用于箱拣的由DLP技术驱动的结构光具备多种优势:
• 抗环境光照能力强。工厂的光照条件,如低曝光和不同照明区域之间的高对比度,导致传感器曝光不足或会对机器视觉系统产生干扰的闪光灯,对需要机器视觉的应用(如箱拣)来说是一大挑战。由DLP技术驱动的结构光本身具有主动照明,这使得它能够抵抗这些条件。
• 无活动部件。结构光系统可以立即捕获整个场景,不再需要将光束扫过物体或通过光束移动物体(如在扫描解决方案中)。结构光系统保护在宏观尺度内不使用活动部件,这使其能够免受机械磨损。
• 实时3D图像采集。DLP芯片中的微镜以高速度控制,可提供高达32kHz的自定义图案投影。除此之外,DLP控制器提供触发输出和输入,可用于使相机和其他设备与投影图案序列保持同步。这些功能有助于实现允许同时扫描和挑选的实时3D图像采集。
• 投影图案的高对比度和高分辨率。由于每块微镜可以将光反射到目标或吸收表面上,因而可以获得高对比度,使得能够在不受物体表面属性影响情况下进行准确的点检测。再加上使用具有2560 x 1600块镜子的高分辨率DLP芯片,可以探测到微米级的物体。
• 适用于物体参数。与使用衍射光学元件的系统相比,可编程图案和各种点编码方案(如相移或格雷编码)使结构光系统更适合对象参数。
• 加快开发时间。尽管机器人提供较高的重复性,但在非结构化环境中,箱拣需要精确性。因为在这种环境下,每次从储存箱中取出一个物体时,所拣选的物体的位置和方向都会发生变化。成功应对这一挑战需要可靠的工艺流程——从机器视觉到计算软件,再到机器人的灵巧性和抓取器。使所有东西协同工作可能是一项耗费大量开发时间的挑战。

图2:DLP芯片包含数百万个可在高速下单独控制并反射光线以产生投影图案的微镜。
TI的DLP技术评估模块能够将结构光快速植入机器视觉工作流程。为了演示这种能力,工厂自动化与控制系统工程师以一定的距离和角度将DLP LightCrafter 4500评估板安装至单色相机。DLP评估板由相机通过一根互相连接的触发电缆触发;如图3所示。
图3:结构光设置,包括DLP产品LightCrafter 4500(左)、灰点前视红外线Flea3相机(右)和校准(后)。
电路板和相机都通过USB连接到PC,且整个设置都用于校准板。使用DLP®技术为3D机器视觉应用程序精确生成点云的参考设计中软件之后会被用于校准相机和投影仪的参数,如焦距、焦点、镜头失真、相对于校准板的相机平移和旋转。参考设计用户指南逐步介绍了此过程。
只有当相机相对于DLP产品板移动时,才需要重新校准。
在完成设置之后,可以创建真实目标的点云。这些云由软件以任意文件格式输出,然后由Halcon的HDevelop平台上开发的一些简短代码来读取和显示。图4显示了一个点云,该点云对装满咖啡杯的箱子的深度信息进行了颜色编码。

图4:在Halcon HDevelop(右)中显示的箱子中,捕捉到的杯子(左)和由DLP驱动的多个杯子的结构光获取的点云
Halcon的表面匹配可以通过比较点云和杯子的3D CAD模型来确定杯子的3D姿态。这样一来,机械臂现在就可以“看到”物体,并且可以计算出机械臂的最佳进场路线,使其能够避开非结构化和不断变化的环境中的障碍物,从而从箱中挑选出物体。
责任编辑:gt
-
机器人
+关注
关注
214文章
31633浏览量
224413 -
ti
+关注
关注
114文章
8086浏览量
220233 -
机器视觉
+关注
关注
166文章
4852浏览量
126726 -
dlp
+关注
关注
6文章
402浏览量
63449
发布评论请先 登录
采用基于TI DLP®技术的结构光实现高精度3D扫描
如何用PC来控制DLP2000EVM来投影结构光图案?
采用 DLP® 技术的顶级立体光固化成型印刷 3D 打印机
面向3D机器视觉应用并采用DLP技术的精确点云生成参考设计
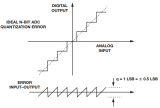
深度剖析ADC的不精确性
影响跌落试验机检测精确性的因素有哪些

利用TI DLP®技术驱动结构光系统来实现箱拣精度

一个简短的ADC不精确性指南



评论