 ABB工业机器人DSQC1030新I/O配置介绍
ABB工业机器人DSQC1030新I/O配置介绍
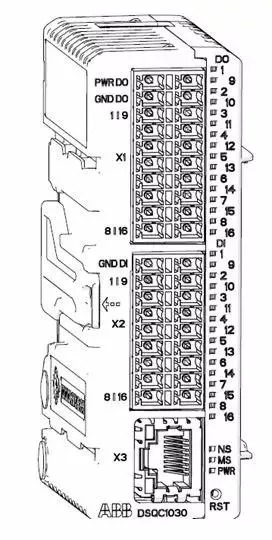
1)ABB新机器人逐渐开始使用DSQC1030(如下图)代替原有DSQC652IO版
2)该硬件使用Ethernetip协议。机器人不需要额外配置选项。如果机器人需要做主站连接其他Ethernetip从站或者机器人做Etherneti从站连接其他设备主站,仍需要购买选项841-1Ethernetip Scanner/Adapter
3)硬件连接:
出厂会默认把X5网口(设备底部)和控制器X4 LAN2口上
硬件最上端的x4为设备供电,默认已经从xt31引电过来
X1为输出,其中PWR DO和GND DO为DO的24v和0v,需要单独接电(也可从XT31引电),相当于之前DSQC652的9和10针脚
X2为输入,其中GND DI为DI的0v,需要单独接线(也可从XT31接线)
4)第一次开机后,系统会自动识别硬件,给出提示
5)根据提示配置,完成配置后就自动分配16di和16do
6)如果开机错过配置提示,也可进入控制面板-配置-Ethernetip Device,添加
模板选择ABB LOCAL I/O,地址192.168.125.100
7)后续添加signal,方法和之前类似,所属设备选Local IO
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
面板
+关注
关注
13文章
1684浏览量
54027 -
工业机器人
+关注
关注
91文章
3374浏览量
92844 -
ABB
+关注
关注
26文章
527浏览量
52934
原文标题:ABB工业机器人新I/O DSQC1030配置
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ABB机器人与西门子PLC通讯案例
在现代工业自动化领域中,机器人与可编程逻辑控制器(PLC)之间的通讯是实现高效、精准生产线的关键。ABB机器人与西门子PLC作为行业内的佼佼者,其通讯技术的掌握对于提升生产效率、优化生
abb机器人系统如何添加选项
ABB机器人系统是一种广泛应用于工业生产领域的自动化设备。在实际应用中,用户可能需要对机器人系统进行一些配置和设置,以满足特定的生产需求。本
abb机器人常用指令大全
ABB机器人是一种广泛应用于工业自动化领域的智能设备,其指令系统丰富多样,能够满足各种复杂场景的需求。 基本指令 1.1 Move指令 Move指令是ABB
工业机器人abb左边布局没了怎么办
布局丢失或出现问题,可能会影响机器人的正常运行和操作。本文将详细介绍如何排查和解决ABB工业机器人左边布局丢失的问题。 1. 确认问题 首先
abb机器人movej和movel的区别
ABB机器人是一种广泛应用于工业自动化领域的智能设备,具有高度的灵活性和可靠性。在ABB机器人的编程和操作中,movej和movel是两种常
abb机器人的io通信和信号设置过程
引言 ABB机器人作为工业自动化领域的重要设备,其IO通信和信号设置是实现机器人与外部设备进行数据交换和控制的关键。本文将详细介绍
abb机器人的基本配置包括哪些
ABB机器人是一种广泛应用于工业自动化领域的智能设备。它具有高度的灵活性、可靠性和精确性,可以完成各种复杂的任务。为了实现这些功能,ABB机器人
abb工业机器人的编程语言是什么
ABB工业机器人的编程语言主要是RAPID(Robot Application Programming Interface for Development),它是一种高级编程语言,专门为工业
ABB工业机器人运动指令有哪几个
ABB工业机器人是一种广泛应用于制造业、物流、医疗等领域的自动化设备。其运动指令是实现机器人精确控制的关键。以下是对ABB





 工商网监
工商网监
评论