 变电站机器人智能巡检系统设计方案和关键技术
变电站机器人智能巡检系统设计方案和关键技术
研发了一套变电站机器人智能巡检系统,从机器人本体、充电系统、无线传输系统、本地监控后台和环境适应性等方面介绍了巡检系统设计方案和各组成部分的关键技术。从现场勘查、设备安装、巡检规划和巡检应用等方面介绍了工程实施步骤和在电网220 kV、500 kV变电站的实际应用情况。分析了机器人巡检调试过程中存在的行进时出轨、无线通信不稳定、表计读取不准确、行走转弯卡涩等问题,并提出了解决措施。该巡检系统具有部署快速、适应性强、采集数据准确、定位精度高、超声防撞等显著优点,各项性能指标均满足变电站智能巡检需求,具有良好的推广应用前景。
引言
随着电网规模的增大、电压等级的提高,对供电安全可靠性要求也更加严格,变电站正常运行成为保障电力系统供电安全的重要环节[1-2]。目前中国电网主要采用人工巡检作业方式,即采用人工巡视、手工记录的模式对运行中的变电设备进行检查。人工巡检存在劳动强度大、工作效率低、巡检质量不稳定等缺点,恶劣气象条件对巡检人员身体也存在危害[3-5]。近年来,采用机器人巡检代替人工巡检模式已成为变电站巡检发展的热点方向[6-8]。
国外较早开展变电站机器人研究工作。日本在20世纪80年代开始研制的变电站巡检机器人使用可见光和红外传感器对变电站设备进行巡检,实现对巡检数据进行自动处理[9-10]。加拿大魁北克研制的变电站巡检机器人,实现了远程监控,可在后台对机器人进行实时控制和远程操作[11]。巴西研制了在变电站高空行走轨道移动的热点监测机器人,实现了变电设备异常发热的红外检测[12]。
国内山东省电力公司于1999年最早开始变电站巡检机器人研究,并于2004年研制成功第1台功能样机,后在国家863项目支持下研制出变电站巡检机器人[13]。2012年重庆电力公司在500 kV巴南变电站成功应用机器人进行自主巡检作业。2014年浙江国自机器人公司研制的机器人在瑞安变电站投运。目前,中国在变电站机器人巡检领域取得了长足进展,但在多传感器综合探测、四轮驱动移动平台、综合导航和精确对准、故障精确诊断等技术方面还存在瓶颈[14-15]。
基于上述关键技术难点,研发了一套变电站机器人智能巡检系统。本文介绍巡检系统总体设计方案和组成部分,论述巡检系统各部分关键技术,说明变电站机器人巡检工程实施细节和在220 kV清远站和500 kV五邑站巡检应用情况,分析巡检应用存在的问题并提出解决措施。研发的变电站机器人智能巡检系统在后续巡检应用中能较好地完成巡检任务,取得良好的巡检效果,具有良好的推广应用前景。
1 机器人巡检系统总体设计
1.1 巡检系统组成
机器人巡检系统由机器人本体、充电系统、无线传输系统、本体监控后台及辅助设施组成。系统组成框图如图1所示。系统具有以下特点:(1)使用无轨导航方式,实现快速部署,可方便站间调配;(2)采用四轮独立驱动,适应于各种复杂环境,提供高清晰度红外及可见光视频图像,测温精度达0.5 ℃;(3)采用基于激光雷达和惯导组合的精确地形匹配的导航方案,定位精度达到1 cm;(4)超声防撞,提供高可靠性安全保障,可原地全方位运动,为巡检提供更强的易用性。
1.2 机器人本体
机器人本体由外形结构部件、运动控制系统、供电系统、传感器系统和导航系统组成。
1.2.1 外形结构部件
机器人外形结构设计以简洁实用、硬朗可靠为基本原则,配合良好的平面切割技术,兼顾重量、稳定性和防护等级要求;表面采用喷塑和阳极氧化工艺处理,具有较强的防腐性能;机器人结构大量采用铝合金材料,重量小于100 kg。
1.2.2 运动控制系统
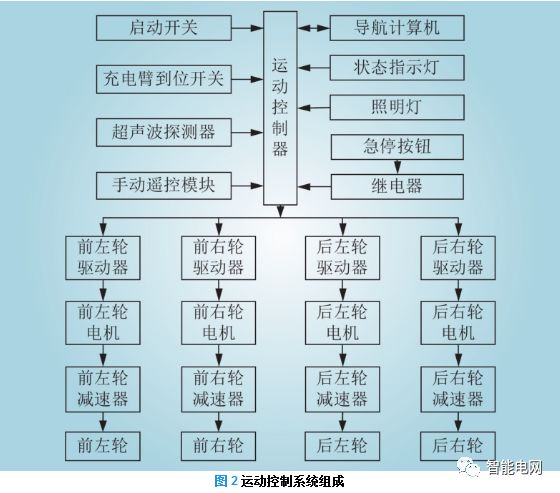
机器人运动控制系统主要由运动控制器、电机驱动器、电机、减速器、车轮、超声波避障模块、手动遥控模块、状态指示灯等组成,如图2所示。
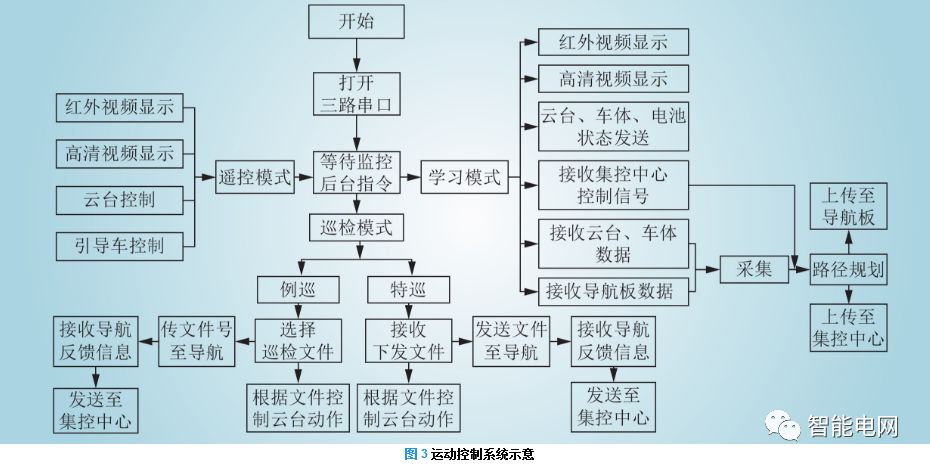
运动控制系统主要实现与监控后台的通信以及对车体及云台的控制功能,实时接收车体、云台状态信息并上传,其工作流程如图3所示。
为适应变电站户外运行需求,机器人车体选用轮式四轮驱动,在运动控制中应用PID控制及PMSM矢量控制算法进行车体控制,实现转速精确控制和转矩快速响应,保证了控制算法的成熟性和稳定性。4轮独立驱动及柔性匹配控制实现了零转弯半径,原地360°旋转,现场路径规划灵活,环境适应能力强。驱动电机使用低磁阻大扭矩驱动电机,系统调速范围宽、效率高、可靠性好,机器人最大运行速度可达1.1 m/s,可越过10 cm障碍物、爬坡能力达到25°。
1.2.3 供电系统
(1)电池选型。采用磷酸铁锂电池供电,电池额定电压36 V,电池容量50 Ah,为满足电池充放电及储运状态下的安全要求,电池安装在防爆、阻燃材料制作的专用电池箱内。
(2)电源管理系统设计。锂电池组电源管理系统(BMS)采用集中式管理。BMS由主控单元(CMU)和若干个监控单元(BMU)组成。BMU检测和均衡管理电池模块的电压和温度,并将数据传给CMU。CMU检测锂电池组的总电压、总电流及绝缘度,负责与机器人控制系统及充电机通信,对电池组充放电进行保护。
(3)BMS性能改进。锂电池间各个参数不可避免地存在一些微小差异,由于内阻、自放电影响及充放电次数增多,电池间参数差异会放大,将减少锂电池寿命甚至产生电源安全隐患。通过BMS实施均衡管理,电池组将保持较好的一致性,可延长电池寿命和降低成本,确保电池一次充电后续航能力不小于5 h,提高系统可靠性和稳定性。
1.2.4 传感器系统
(1)可见光探测。可见光摄像机用于观察设备外观和读取仪表数值,具备自动或手动对焦功能,视频分辨率达1 080 p,光学变焦倍数达30倍。采用自动光圈设计,通过检测视频信号平均值,自动控制镜头光圈的扩大或缩小,即可在不同照度下获得标准视频信号电平。机器人云台上安装了强光LED照明灯和雨刷器,实现可见光夜间和雨天探测。照明灯和雨刷器由本地监控后台或远程集控后台进行控制。
(2)红外热像探测。红外热像仪的红外探测器接收物体辐射热量,把它转换成电信号,经后续放大、滤波、模数转换,CPU处理后在图像显示器上显示。在实际测温中,首先采用高精度黑体进行标定,找出黑体温度与图像灰度值的对应关系。红外热成像仪具备自动对焦功能,可在实时影像中叠加显示温度最高点位置及温度值,红外热像仪热灵敏度优于50 mK,测温精度优于2 K。
(3)声音探测。机器人安装有扩音器和麦克,可实现与监控后台双向语音对讲和现场声音采集。同时,通过采集运行设备的正常和异常声音,提取出声音的特征参数,建立正常和异常声音模型库。将机器人采集的噪声数据传送到控制后台,基于音频诊断软件和模型库进行运行状态识别,判断设备异常声音,并发出警报。诊断流程如图4所示。
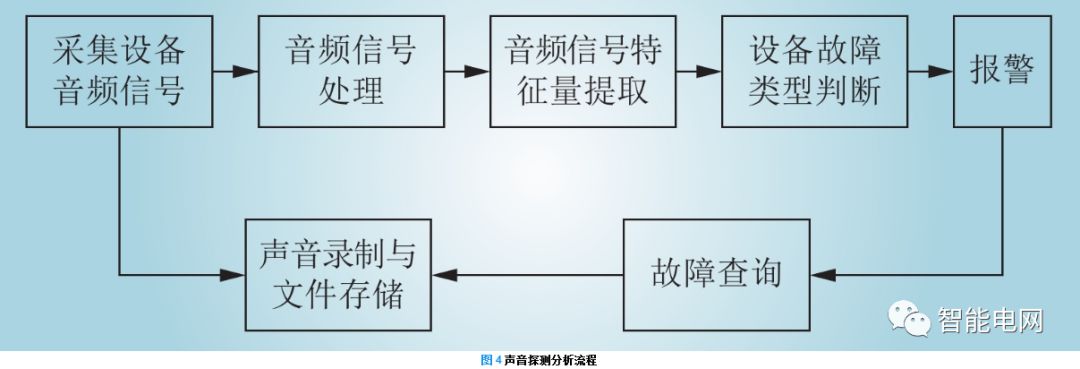
声音分析软件主要由信号处理、信号特征提取和信号显示等部分组成。信号处理部分包括端点检测、分帧和加窗。端点检测用来检测输入声音信号中的有效语音成分,采用倒谱特征法;分帧是将原始语音信号分为小段,并做帧移处理;加窗是在分帧之后使频谱平滑、防止高频泄漏。信号特征提取过程包括FFT求取功率谱、带通滤波器组、求取对数能量、离散余弦变换和提取一阶差分MFCC系数。显示部分能够显示被测声音中各个频率的数字化信号图形。
(4)全方位智能云台。云台安装在机器人平台上方,用于承载可见光、红外以及声音传感器。云台以直流伺服电机驱动,使云台具有水平和垂直2个相互独立的旋转自由度。云台俯仰框装有红外和可见光光窗。云台运动控制核心部分采用数字信号处理器(DSP)芯片,该芯片负责水平和俯仰2个自由度的电机运动控制以及与接口转换模块通信。云台主要性能指标满足如下要求:云台预置位数量≥10 000个,垂直运动范围–30°~+90°,水平运动范围0°~+360°连续,定位精度±0.1°,水平旋转速度0.01~60°/s,垂直旋转速度0.01~30°/s。
1.2.5 导航系统
机器人依靠激光雷达、惯导、里程计综合导航,利用多传感器融合技术,得到车体定位信息,实现按照预设路线和停靠位置自主行走和停靠功能。激光雷达选用SICK公司LMS511高性能室外型激光扫描雷达,测量距离达80 m,扫描范围190°,分辨率0.166 7°,扫描频率高达25 Hz。可在–30 ℃~+55 ℃恶劣环境中工作。惯导可提供车体三轴姿态角(或角速率)以及加速度信息,分辨率0.05°,误差1.5°。里程计信息包括车体当前坐标,由车体运动学模型和4轮转速位移等信息计算得到,误差在3%以内。
1.3 充电系统
充电房由充电柜、充电座、无线通信设备和自动卷帘门组成。充电柜和充电座用于机器人自动对接充电,无线通信设备选用与本地监控后台相同的无线网桥和天线,天线安装在充电房的顶部。
机器人工作状态分为巡检、充电、空闲等3种。收到巡检命令后,机器人检查电池电量是否充足,充足即进入巡检状态,开始执行巡检任务,否则拒绝执行并报警。巡检完成后,机器人返回充电房。机器人在巡检中实时检测电池电量,如果电量不足则返回充电房充电,充电过程完全自动化。
1.4 无线传输系统
机器人通过无线网桥与本地监控后台实现双向、实时信息交互。信息交互内容包括机器人本体状态和被检测设备图像、语音和指示性数据。机器人采用5.8 GHz频段高质量等级的室外专用数字无线网桥,实现长距离多路视频、音频以及数据的实时传输,最长传输距离达10 km,数传误码率≤10-6,数传时延≤20 ms,图传时延≤300 ms,由于此频段的无线网桥无需申请无线执照,比其他有线网络设备更方便部署。机器人通过无线网桥接收监控后台的控制指令,进行云台转动、设备检测、车体运动和自动充电,并检测机器人状态和各类预警、告警信息并进行上报。在通信中断、接收的报文内容异常等情况下,图像、语音、数据不丢失,同时系统将发出告警信息,并在通信恢复后自动续传。
1.5 本地监控后台
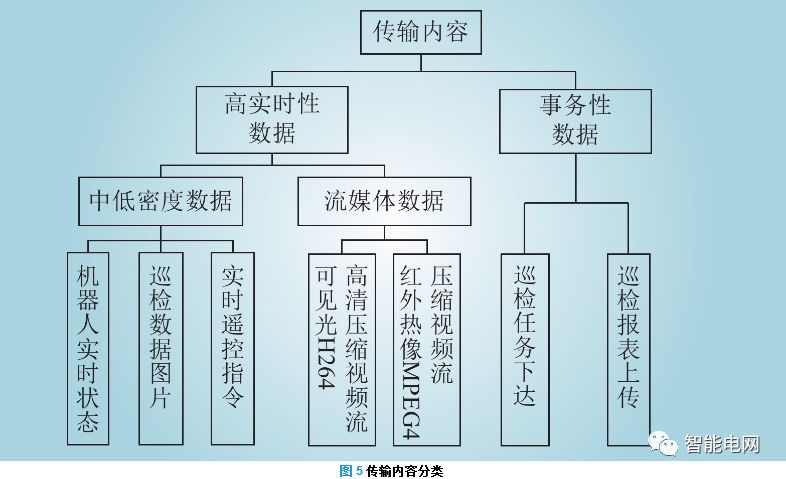
本地监控后台由计算机、无线通信设备、监控分析软件和数据库等组成。机器人与监控后台通过无线局域网连接,采用TCP/IP协议进行数据交互,传输内容如图5所示。
监控后台软件采用C++语言开发,基于.NET架构,可以在Windows的各个版本操作系统跨平台运行,软件组成如图6所示。
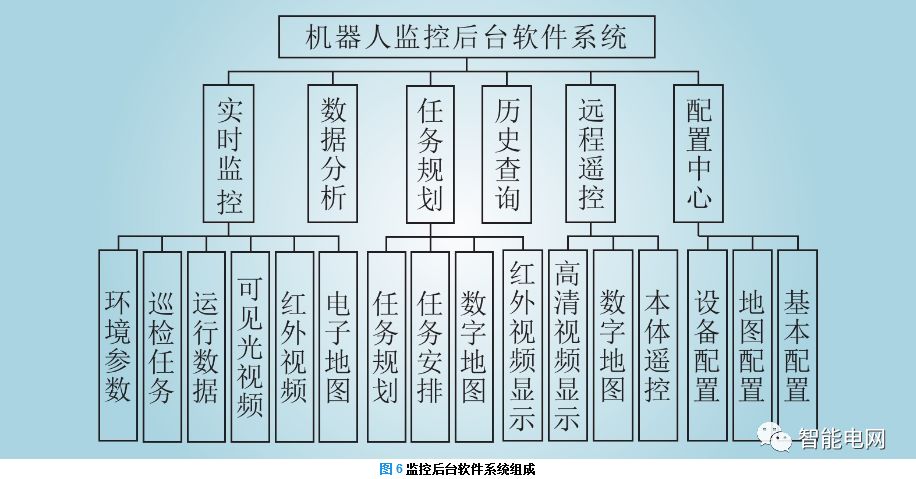
(1)实时监控模块负责查看机器人运行过程中的图像信息、车体状态信息、车体行进信息、电池状态信息、巡检现场气象信息、巡检任务信息等。
(2)任务规划模块分为例行、特巡任务规划和遥控巡检3种模式,可随时进行任务模式的切换。根据变电站巡检需求,例行任务规划可提前生成若干巡检任务,每天定期巡检;特巡任务规划可实时生成临时巡检任务,执行特殊巡检任务。
(3)远程遥控模块可以实时遥控机器人到规定地点做规定动作。该模块可通过手柄控制云台方位和俯仰,控制车体速度和方向。
(4)配置中心模块包括设备配置、地图配置和基本配置3个子界面。设备配置界面包括红外配置、可见光配置、车体配置和云台配置。
(5)历史查询和数据分析模块可实现可见光图像、红外图像、声音及表计读数、设备位置状态、注油设备油位等信息的存储、诊断和查询。
1.6 环境适应性
机器人按照全国各地区变电站极端环境气候设计,针对暴风大雨、湿热、高海拔、寒冷等恶劣气候条件,变电站强电场、强磁场环境,通过“三防”设计、防风设计、电磁兼容性、抗震设计以及温度适应性等设计,确保机器人在不同气候条件下长期可靠、安全稳定运行。
1.6.1 “三防”设计
机器人外壳采用静电喷涂工艺,具有防腐蚀、防水、防氧化三防功能,机器人内部传感、控制均采用模块化设计,标准化生产。机器人采用一体化结构设计,具有防水、防尘功能。整机满足GB 4208中IP54的设计要求,最大涉水深度大于10 cm。
1.6.2 防风设计
机器人采用四轮驱动底盘结构,设备重心低,有利于机器人在地面上稳定运行。机器人本体结构紧凑设计和密封性高,具备抵抗10级风能力。
1.6.3 电磁兼容设计
机器人电子元器件,电源、通信等模块采用屏蔽、隔离处理,关键信号通过阻抗匹配设计、各设备模块采用等电势共地设计,输入输出接口的滤波和保护设计等技术确保各模块的信号完整性、安全和可靠性。
1.6.4 防振动设计
机器人在变电站巡检过程中,由于受路面环境的影响,不可避免地会有一定程度的振动,针对可能出现的固定螺丝松动、部件断裂等问题,采取以下防振措施:(1)对所有紧固件增加弹垫、齿形垫圈、涂加螺纹胶及采用防松螺母等设计提高螺栓螺钉紧固效果及紧固强度;(2)对部件断裂部分优化设计提高部件强度;(3)增加防护套、减振弹簧等措施,减缓外力对管路连接部位的作用。
1.6.5 温度适应性设计
为保证在炎热或寒冷环境下正常工作和长期储藏,机器人所有部件和元器件均选用宽温度范围的工业级产品;在云台护罩内安装排热风扇和加温板,可自动对护罩内环境进行排热或加温,有利于护罩内可见光相机和红外探测器在不同温度环境下正常工作。机器人工作环境温度为–25 ℃~+55 ℃,存储环境温度为–30 ℃~+65 ℃,工作和存储环境相对湿度为5%~95%(无冷凝水)。
2 变电站机器人巡检工程实施
2.1 变电站现场勘查
变电站机器人巡检工程实施的现场勘查阶段分为以下几个步骤:(1)根据站内设备分布、特征物和巡检便利性等信息选取充电房最优安装位置;(2)根据变电站建筑物实际情况选择无线通信设施安装位置;(3)视道路连通性、台阶高度等决定道路是否需要改造;(4)根据站内设备布置情况,初步确定巡检路线。
2.2 巡检设备安装
2.2.1 充电房安装
机器人充电房内设有自动充电装置,配有能够自动开启和关闭的门禁系统。充电房外形尺寸2.0 m (宽)×2.5 m (长)×2.8 m (高),采用一体化箱式结构,安装在变电站高压设备区的空地上,所在位置比站内主干道高,修筑的地基自然放坡与站内道路相连。充电房选址原则:(1)靠近主控室,基建和调试方便;(2)选择平整地面,避免坑洼明显地带;(3)不宜过于远离巡检区域。
2.2.2 无线网桥和气象传感器安装
无线网桥和微气象传感器是机器人巡检辅助设备,分别承担着无线通信和气象监测功能,二者均采用户外使用的环境设计,防护等级达到IP55,为便于与后台监控设备进行有线连接,将无线网桥和气象传感器安装在站内主控楼顶层,电源及数据线沿墙壁套管走线,连接至监控后台。
2.2.3 监控后台安装
监控后台由计算机、路由器、鼠标、键盘、扩音器和麦克风等组成。计算机和无线网桥连接至路由器上,路由器可连接至运行单位局域网。
2.3 巡检规划
2.3.1 巡检线路规划
技术人员根据待巡检设备分布位置、巡检道路情况,以充电房为起点进行站内巡检路线的规划,实现巡检路径最优的方案规划。
2.3.2 巡检地图构建
巡检地图通过机器人本体行走,借助后台控制软件自动生成,不需要改动变电站内部环境,不需改动变电站路面,不影响变电站设备设施正常运行。变电站巡检地图构建步骤如下。
(1)选择地图原点:原点选取一般靠近充电房。
(2)初始化激光雷达设备:开启机器人激光雷达传感器传输功能,完成激光雷达初始化。
(3)采集地图构建数据:遥控机器人按照规划的巡检线路,绕整个变电站中行走一圈,机器人自动记录所有设备以及建筑物地理信息,进而完成整个地图构建数据的采集。
(4)自动生成地图:完成地图构建数据采集后,开启地图生成程序,自动生成变电站巡检地图。
(5)设定巡检点与巡检路线:地图构建完成后,根据变电站巡检设备类型及数量,设定巡检点,并优化巡检路线。
(6)巡检测试:按照标定完成的最优路线,对变电站设备的巡检点进行测试,查找遗漏,调整巡检路线,保证设备巡检点的全覆盖。
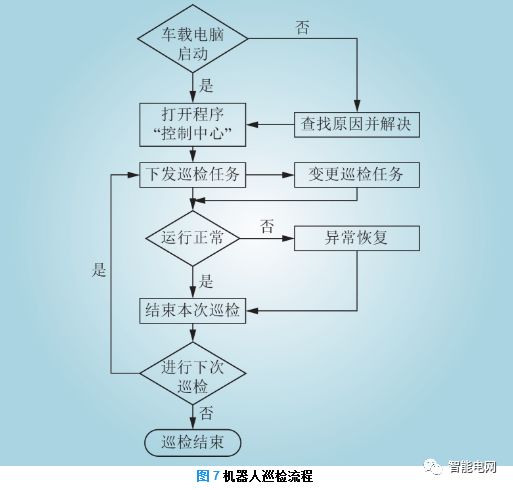
机器人巡检流程如图7所示。
2.4 巡检应用
2.4.1 220 kV清远站应用
2015年12月完成机器人充电房、无线网桥和监控后台在220 kV清远站的布置,2016年1月机器人开始进行激光导航地图扫描、巡检地图制作及巡检任务点采集,4月完成巡检应用。经过4个月的现场调试应用,完成了机器人部署和任务点采集,随后执行全站巡检调试。巡检任务包含主变区域、220 kV区域、110 kV区域的2 490个巡检任务点,覆盖率达94.1%。巡检任务点分布如图8所示。
2.4.2 500 kV五邑站应用
2016年9月完成机器人充电房、无线网桥和监控后台的布置,10月完成站内主变和500 kV区域的巡检部署并开展巡检。经过2周的现场调试,解决了机器人在500 kV区域强电磁场环境下的通信干扰问题,机器人在全部500 kV区域均可与后台系统可靠通信。同时完成了主变和500 kV第一串区域部署和任务点采集,随后执行部署区域巡检。巡检任务包含64个可见光巡检任务点、273个红外巡检任务点和10个高清辅助观测点。高清辅助观测点包含开关控制箱、主变等设备外观图像。
3 巡检应用问题分析与解决措施
在变电站进行机器人巡检调试过程中,发现尚有待解决的技术问题,例如机器人运行中受外物干扰出轨、无线信号连接不稳定、表计读取准确率不够、机器人行走转弯卡涩等。
3.1 机器人巡检中出轨
机器人巡检过程中,受到外部干扰,例如人员围观时,发生机器人脱离巡检路线问题,经分析导航计算机记录的传感器、通信等数据,发现机器人里程计的输出数据在出现异常时刻偶发一次跳变,由于跳变数值大于40 m,恰好达到下个转弯点设定坐标,造成程序误判使得机器人误认为已到达转弯点并执行转弯动作。此后随着机器人移动,里程数据仍按照跳变后的数值继续累加,导致转弯后机器人继续前行的问题。
解决措施如下:(1)在车体控制板和导航计算机增加里程数据跳变判别和异常情况下处理数据程序,当里程数据变化量大于设定应用变化量时,车体控制板滤除异常数据,导航计算机按照前一帧正常数据累加预测值替代异常数据;(2)将迭代最近点算法用于巡检机器人的前期地图拼接和导航过程中的机器人定位,该算法具有逻辑简单、精度较高、易实现、自身具有稳定性和鲁棒性的特点。采用以上措施后,机器人运行中的抗干扰能力大大增强,实现了任意角度折线路径的行走。
3.2 无线通信不稳定
机器人运行调试初期,存在部分巡检路段后台显示画面卡涩、数据回传速度降低等现象。经现场观察和分析,发现原因是该路段处于定向接收天线覆盖的死角,接收通信信号太弱,造成后台画面停顿,数据回传速度降低。
通过更换大功率、大发射角天线,并且调整信号增益、信号频率、通信模式等参数,大大改善了通信质量,确保了机器人正常运行。
3.3 表计读取不准确
巡检任务中有较多的SF6压力表需要识别读取,但机器人对此类仪表的识别准确率较低,经分析发现是由于该变电站内安装的SF6压力表的指针细小,指针下半部为白色,上半部为黑色,而表盘刻度也为黑色,造成了仪表识别软件难以区分指针和刻度,从而使得判读不准确。
经过对站内全部SF6压力表样本的大量采集,重新优化仪表识别软件的指针读取算法,在后续的巡检任务中,机器人SF6压力表计识别准确率大大提升。
3.4 行走转弯卡涩
机器人在原地转向过程中,出现个别车轮悬空,转弯动作卡涩现象。经过现场观察和分析,原因是巡检现场路面不平整,机器人安装的是实心轮胎,轮胎弹性小,造成原地转弯中个别车轮悬空。由于机器人原地转弯是依靠4个轮子同时驱动完成的,车轮悬空造成转弯动力不足,产生转弯卡涩。
通过将实心轮胎更换为弹性较好的充气轮胎,大大减小了路面不平造成的个别车轮悬空几率,在后续巡检过程中未曾出现此类问题。
4 结语
变电站机器人智能巡检是电力巡检模式发展的重要方向,实际应用中仍存在不少技术瓶颈。本文研发了一套变电站机器人智能巡检系统,从机器人本体、充电系统、无线传输系统、本地监控后台和环境适应性等方面介绍了巡检系统设计方案和各组成部分的关键技术。该巡检系统具有部署快速、适应性强、采集数据准确、定位精度高、超声防撞等显著优点,各项关键性能指标均满足变电站智能巡检任务需求。
从现场勘查、设备安装、巡检规划和巡检应用等方面介绍了变电站机器人巡检工程实施步骤,通过在电网220 kV、500 kV变电站实际巡检,指出了机器人巡检调试过程中发现的问题,并进行分析解决,在后续巡检应用中较好地完成了各类巡检任务,取得了显著效果,研发的巡检系统具有良好的推广应用前景。
作者:彭向阳 , 金亮 , 王柯 , 钱金菊 , 岳卫兵
参考文献
[1]赵坤. 变电站智能巡检机器人视觉导航方法研究[D]. 北京: 华北电力大学, 2014: 1-2. (1)
[2]宋晓明. 变电站智能巡检机器人关键技术研究[D]. 长沙: 长沙理工大学大学, 2013: 1-2. (1)
[3]陈启卷, 毛慧和, 肖志怀, 等. 便携式电力设备巡检装置[J]. 电力系统自动化, 2001, 25(2): 61-63.
CHEN Qijuan, MAO Huihe, XIAO Zhihuai, et al. Portable inspection tour installation of power equipment[J]. Automation of Electric Power Systems, 2001, 25(2): 61-63. (1)
[4]杨旭东, 黄玉柱, 李继刚, 等. 变电站巡检机器人研究综述[J]. 山东电力技术, 2015, 42(1): 30-34.
YANG Xudong, HUANG Yuzhu, LI Jigang, et al. Research status review of robots applied in substations for equipment inspection[J]. Shandong Electric Power, 2015, 42(1): 30-34. (0)
[5]胡启明, 胡润滋, 周平. 变电站巡检机器人应用技术[J]. 华中电力, 2011(5): 36-38.
HU Qiming, HU Runzi, ZHOU Ping. Application of inspection robot technology in substation[J]. Central China Electric Power, 2011(5): 36-38. (1)
[6]周立辉, 张永生, 孙勇, 等. 智能变电站巡检机器人研制及应用[J]. 电力系统自动化, 2011, 35(19): 84-88.
ZHOU Lihui, ZHANG Yongsheng, SUN Yong, et al. Development and application of equipment inspection robot for smart substations[J]. Automation of Electric Power Systems, 2011, 35(19): 84-88. (1)
[7]王可之. 基于Pioneer3-AT的变电站巡检控制系统设计与实现[D]. 重庆: 重庆大学, 2011: 1-3. (0)
[8]祖丽楠, 张强, 梁静, 等. 变电站巡检机器人导航方法研究[J]. 科学技术与工程, 2014, 14(9): 198-201.
ZU Linan, ZHANG Qiang, LIANG Jing, et al. A research of substation inspection robot navigation method[J]. Science Technology and Engineering, 2014, 14(9): 198-201. (1)
[9]TAKAOKA K, YOKOYAMA K, WAKISAKO H. Development of the fully-automatic live-line maintenance robot phase 3[C]//Proceedings of the 4th IEEE International Symposium on Assembly and Task Planning Soft Research Park, 2001: 28-29. (1)
[10]NAKASHIMA M, YANO K, MARUYAMA Y, et al. The hot-line work robot system phase 2 and its human-robot interface MOS[C]//IEEE International Conference on Transmission and Distribution Construction and Live Line Maintenance, 1995: 212-218. (1)
[11]POULIOT N, MONTAMBAULT S. Geometric design of the line scout, a teleported robot for power line inspection and maintenance[C]//Proceedings of IEEE International Conference on Robotics and Automation, USA, 2008: 3970-3977. (1)
[12]PINTO J K C, MASUDA M, MAGRINI L C, et al. Mobile robot for hot spot monitoring in electric power substation[C]//Transmission and Distribution Conference and Exposition, 2008: 1-5. (1)
[13]鲁守银, 钱庆林, 张斌, 等. 变电站设备巡检机器人的研制[J]. 电力系统自动化, 2006, 30(13): 94-98.
LU Shouyin, QIAN Qinglin, ZHANG Bin, et al. Development of a mobile robot for substation equipment inspection[J]. Automation of Electric Power Systems, 2006, 30(13): 94-98. DOI:10.3321/j.issn:1000-1026.2006.13.020 (1)
[14]王振华, 黄宵宁, 梁焜, 等. 基于四旋翼无人机的输电线路巡检系统研究[J]. 中国电力, 2012, 45(10): 59-62.
WANG Zhenhua, HUANG Xiaonin, LIANG Kun, et al. Study on the transmission line inspection system based on quadrotor UAVs[J]. Electric Power, 2012, 45(10): 59-62. DOI:10.3969/j.issn.1004-9649.2012.10.013 (1)
[15]彭向阳, 钱金菊, 吴功平, 等. 架空输电线路机器人全自主巡检系统及示范应用[J]. 高电压技术, 2017, 43(8): 2582-2591.
PENG Xiangyang, QIAN Jinju, WU Gongping, et al. Full automatic inspection system and its demonstration application based on robot for overhead transmission lines[J]. High Voltage Engineering, 2017, 43(8): 2582-2591. (1)
-
变电站
+关注
关注
7文章
1256浏览量
41909 -
机器人
+关注
关注
211文章
28468浏览量
207354
原文标题:变电站机器人智能巡检系统设计及应用
文章出处:【微信号:SmartGrid-cn,微信公众号:智能电网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【TL6748 DSP申请】变电站巡检机器人
变电站巡检管理系统
【testo 红外热像仪申请】变电站巡检机器人
惊!变电站智能巡检机器人卷起来了......

智能巡检机器人红外测温技术为变电站电力运维巡检工作提供怎样的帮助

变电站智能巡检机器人的应用领域?

变电站智能巡检机器人解决方案






 工商网监
工商网监
评论