 测量角速率的MEMS陀螺仪有多个误差贡献因素
测量角速率的MEMS陀螺仪有多个误差贡献因素
测量角速率的MEMS陀螺仪有多个误差贡献因素,偏置不稳定性是其中之一。然而,与提供增强性能的分立器件相比,惯性测量单元(IMU)具有多方面优势。六自由度IMU由多个惯性MEMS传感器组成,这些传感器经过温度补偿和校准,对齐在正交轴上。内置三轴陀螺仪测量绕一个已知点的旋转,而三轴加速度计测量位移。后处理步骤利用数字信号处理器或微控制器执行,从而在内部实现传感器融合。
陀螺仪会受偏置不稳定性影响,由于器件固有的不足和噪声,陀螺仪的初始零点读数会随时间漂移。偏置可重复性可以在IMU的已知温度范围内进行校准。然而,恒定偏置不稳定性的积分会引起角度误差。此类误差会随着陀螺仪旋转或角度估计的长期漂移而累积。漂移的不良后果是航向计算的误差会持续增加而不减退。加速度计则相反,其对振动和其他非重力加速度敏感。
引起陀螺仪漂移的主要原因是两个因素的结合:一个是慢速变化的接近DC的变量,称为偏置不稳定性;另一个是较高频率的噪声变量,称为角度随机游走(ARW)。这些参数的大小用每单位时间的旋转角度来衡量。偏航轴对此漂移最为敏感。俯仰(姿态)和滚动轴的相当一部分陀螺仪漂移可以在IMU内部予以消除,即利用加速度计的反馈结果监控相对于重力的位置。在IMU内部利用低通或卡尔曼滤波器对陀螺仪输出进行滤波,也是广泛采用的消除部分漂移误差的方法。
理想情况下,校正所有轴的陀螺仪漂移需要两个基准。九自由度IMU通常会提供额外的磁力计传感器——大约三轴。磁力计检测磁场相对于地磁北极的强度。此类传感器可以与加速度计数据一同使用,作为另一个外部基准,用来降低陀螺仪漂移误差对偏航轴的影响。然而,设计适当的空间磁力计可能不如加速度计可靠,因为有很多东西会产生与地磁大小差不多的磁场。
另一种更有效的长期漂移消除方法是对陀螺仪实施零角速度更新。只要知道器件处于完全静止状态,便可将相应轴的陀螺仪偏移归零。因具体应用不同,这样的机会有很大差异。但只要系统处于重复出现的安静状态,例如汽车怠速、自主机器人静止或人跨脚步之间的时间,就可以进行归零调整。
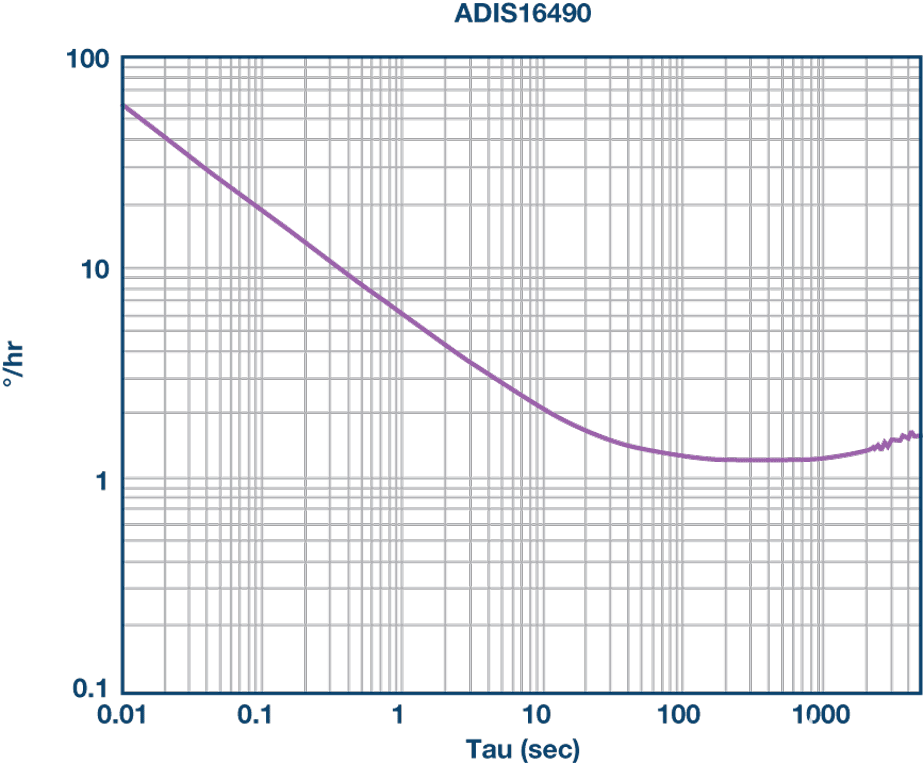
当然,一开始便在设计中使用偏置不稳定性最小的先进IMU,可以最直接地降低陀螺仪漂移。要测量陀螺仪的恒定偏置误差,可以在器件未旋转时,获取输出在较长时间内的平均值。IMU艾伦方差曲线显示陀螺仪漂移(每小时旋转度数)与积分时间(τ)的关系。它一般是以对数-对数比例尺绘制的。
ADIS16490是ADI高性能战术级IMU产品系列中的最新产品。ADIS16490的运动中偏置稳定度仅为每小时1.8°。参见图1所示的ADIS16490艾伦方差曲线,1小时点(3600秒)对应的误差为1.8°。
图1.ADIS16490陀螺仪艾伦方差根
-
微控制器
+关注
关注
48文章
7758浏览量
152835 -
陀螺仪
+关注
关注
44文章
800浏览量
99301 -
数字信号处理器
+关注
关注
5文章
472浏览量
27577
原文标题:【精选】误入歧途的陀螺仪
文章出处:【微信号:eet-china,微信公众号:电子工程专辑】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
MEMS IMU/陀螺仪对准基础
基于MEMS陀螺仪的低噪声反馈控制设计
MEMS陀螺仪中主要噪声源的预测和管理
MEMS陀螺仪中主要噪声源的预测和管理
陀螺仪的种类有哪些?
MEMS IMU/陀螺仪对准基础
三轴陀螺仪有什么用_三轴陀螺仪的作用






 工商网监
工商网监
评论