 吊绳攀爬机器人详细制作教程
吊绳攀爬机器人详细制作教程
这是12号“索道游者”的吊绳攀爬机器人的改良版,其主要是模仿灵长类动物在吊绳攀爬时的运动方式,攀爬在树枝上或者是吊在绳索上,是依靠双手攀住树枝或者绳索,然后通过双臂交替向前抓握来实现移动的。本项目机器人的造型类似一只猴子,所以又称为“机械猴”。
一、基本原理:
本项目的吊绳攀爬机器人,以减速电机为动力,通过一个特别的机械结构——连杆机构来实现在绳索上的攀爬运动。
1-运动方式:
本项目机器人在绳索上攀爬,主要依靠双臂交替往前抓握住绳索。看过《动物世界》就知道,猴子等灵长类动物在丛林间攀爬或者在树枝上吊跃就是这种运动方式;另外体育课如果玩过单杠上抓杠前进也应该了解这种运动方式。
即:
1)由抓握住绳索的一只手臂把身体往前送;
2)接着由另一手臂再往前抓握新的一段绳索;
3)然后原来的手臂放弃抓握绳索,身体往前摆;
4)再由抓住绳索的手臂把身体往前送……
如此循环往复,实现在绳索上攀爬前进。下图是本项目机器人的运动方式的图解(以面向机器人前进的方向来区分左右)。
2-驱动机理
我们采用电机作为动力,为了实现绳索上的攀爬,需要把电机的旋转运动变为不断前后摆动的抓伸运动——这里我们借助一种称之为“连杆机构”的机械结构来实现。
所谓“连杆机构”,就是将长度不等的几个杆通过铰链连接起来,并能灵活转动,其可以将旋转运动转换为各种其他形式的运动。这里所说“铰链”指什么呢,可以看看家里的房门,门板与门框之间是用合页连接的,门是可以围着门轴随意转动的,但是却无法脱离门轴,这里的合页就是一种铰链结构,即:连接在一起,但又能灵活转动。
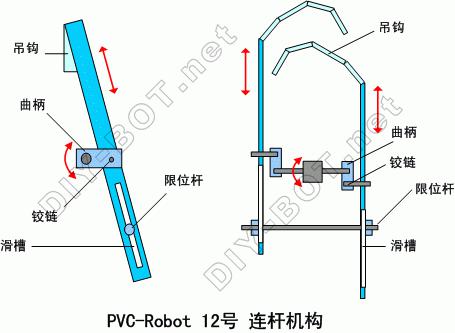
“连杆机构”有很多种,本项目中用到的是“摆动曲柄滑块机构”,即:一种能够将旋转运动转换为往复摆动运动的连杆机构,其主要结构是:摆杆一头固定在一个旋转轮盘的一侧,摆杆作成带有导向槽的结构并可以滑动。
下面为摆动曲柄滑块机构的运动过程示意图。
以下为两种一样的摆动曲柄滑块机构连杆,前者采用了离心圆盘作为转动结构,而后者则采用了曲柄作为转动结构,两者本质是一样。为了加工方便,一般多用后面一种”曲柄“结构(可省掉一个圆盘)。
为了使本项目机器人能够吊挂在绳索上,机器人与绳索接合的部分设计成了一个吊钩的形状。
为了机器人能够双臂交替向前抓握绳索,则“摆动曲柄滑块机构”的安装也比较巧妙,我们用了左右两套相同的连杆机构,且为同轴的方式安装(同一根转动的轴),但两个连杆的铰链结合部分的位置正好相反,即分别位于转盘一条直径线上的两头,也就是曲柄的位置正好相反,使得左右两套连杆机构在同一时间上运动的状态刚好相反,比如:一个位于最左边的位置的时候另一个正好位于最右边的位置,一个位于最高的位置的时候另一个正好位于最低的位置。
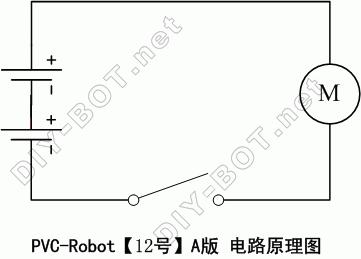
3-电路原理
本项电路原是比较简单的,就是直接一组电池连接一个电机,中间通过一个拨动开关来控制电路的通断。
二、器材准备
电源部件:
减速箱部件:
主体结构部件:
三、制作过程
1-主体结构:
动力——
本项目结构平台的动力部件是减速电机,并且整体规格尺寸是基于PVCBOT的A型减速箱来设计的,也就是说只要是采用PVCBOT的A型减速箱的减速电机就都能作为当前项目的动力部件(常见的有AN20、AK30减速电机)。
当前项目我们直接使用制作完成的AN20(或AK30)减速电机,而关于这些减速电机的具体制作教程请参阅之前在本版块的《PVCBOT【Reducer-AN20】DIY--A型N20减速箱》教程,即:http://www.geekfans.com/forum.php?mod=viewthread&tid=65793&page=1#pid363276
腿部——
剪裁一根长10.5cm、宽1cm的PVC长条。
如图所示从PVC长条其中一端起,分别在2cm、4cm、6.5cm、8.5cm的位置画好横截线,并且把2cm、8.5cm两处的横截线中点作为打孔标记。
在上一步骤画好的两个打孔标记的位置,分别钻出两个直径2mm的小孔。
用尖嘴钳分别沿着PVC长条上4cm和6.5cm位置的横截线,把长条弯折成如图所示的凹形支架。
把凹形支架用502胶水固定在A型减速箱如图所示的位置,即支架顶部搭在电机上,而支架两端与减速箱两侧外壳的后端靠在一起。
这样,减速箱外壳就相当于机器人的躯干,而支架两端长出减速箱外壳的部分就作为机器人的腿部
注意:502胶水只需涂在凹形支架与减速箱外壳之间接触的位置,千万不要涂在靠近电机的位置,以避免把电机给粘坏了。
凹形支架粘贴到减速箱外壳上时,要求支架两端上的小孔不能被减速箱外壳挡住。
因为502胶水干得非常快,为了一击即中保证粘贴位置的准确,建议:
1)先不要涂胶水,尝试把凹形支架搭在目标的位置;
2)接着用铅笔在减速箱外壳上做好固定位置的标记;
3)然后在凹形支架的其中一条腿内侧涂上胶水,对准减速箱外壳上做好的目标位置迅速靠近粘贴上去;
4)贴好了凹形支架的一条腿之后,再用前面同样方法粘贴另一条腿。
把作为限位杆的长轴从凹形支架其中一条腿上的小孔穿进去,再从另一条腿穿出来。
限位杆从两条腿左右两侧伸出的长度要一样。
假如腿部上的两个小孔钻得比较大,容易使得限位杆安装在上面比较松的话,这时候可以涂上一点502胶水把限位杆固定住。
背部——
剪裁一块长9.5cm、宽1.5cm的PVC长条。
从长条一端开始,分别在1cm、3.5cm、6cm、8cm四个位置画上横截线,其中3.5cm处横截线的中点位置画上打孔标记。
在打孔位置钻出一个直径为2mm的小孔。
用尖嘴钳沿着PVC长条上1cm、6cm、8cm三个位置的横截线弯折,最后得到成如图所示的形状,作为背部支架。
准备把背部支架安装到减速箱顶上。
对于背部支架上1cm位置处弯折得到的勾状结构,在内侧涂上少量502胶水,然后勾住凹形支架的顶端,等待502胶水干掉。
背部支架跨过减速箱顶部,从前面勾住减速箱的底部,涂上少量502胶水让背部支架与减速箱固定起来。
背部支架盖在减速箱的顶部,起到一个支撑作用,同时也对减速箱里面的齿轮起到一个保护作用,避免从外部直接碰到齿轮而影响减速箱的工作。
传动——
这里将用盘面上带孔的大齿轮以及螺丝/螺母制作传动用的曲柄结构。
把M2*10的螺丝从大齿轮盘面上的小孔穿过,其中要求是从齿轮中心轴孔突出一侧的盘面穿入。
然后用给螺丝套上M2的螺母并拧紧。
提示:为了拧紧螺母,可以用尖嘴钳把螺母一侧夹紧不允许其转动,再用螺丝刀扭动螺丝并最终拧紧它。
两个大齿轮上都固定了M2*10的螺丝,以此作为曲柄。
用尖嘴钳夹住减速箱上的长轴不允许其转动,然后用手握住大齿轮,让齿轮中心的轴孔对着长轴,把齿轮转动着扭到长轴上。
大齿轮扭入长轴的深度是让长轴刚好从齿轮盘面的另一侧露出来一点。
注意:大齿轮上伸出螺丝的一侧是朝着外侧的。
两个大齿轮分别安装到长轴的两端。
转动大齿轮,调整它与长轴之间的相对位置,使得左右两个大齿轮上的螺丝位置正好是对称的,也就是:
假如左边齿轮上的螺丝位于齿轮盘面的最高点,则右边齿轮上的螺丝就应该位于齿轮盘面的最低点;假如左边齿轮上的螺丝位于齿轮盘面的最低点,则右边齿轮上的螺丝就应该位于齿轮盘面的最高点。
手臂——
剪一段长14.5cm、宽1.5cm的PVC长条。
从长条其中一端起,分别在3cm、3.5cm、5cm、7cm、9.5cm、12cm、13cm等七个位置画上横截线。
同时,从一端边缘开始到3cm处横截线之间,在中心线左右各1.5mm的位置分别画一条连接直线,即为边缘到横截线之间有一根宽度为3mm左右的开槽标记线。
另外,在7cm处横截线的中点位置画上打孔标记。
沿着前面的开槽标记用剪刀在长条上剪出一条长3cm、宽3mm的凹槽。
同时,在打孔标记的位置,钻一个直径为2mm的小孔。
用同样的方法,制成两根这样形状的PVC长条。
用尖嘴钳沿着PVC长条上3.5cm、5cm、9.5cm、12cm、13cm等五个位置的横截线弯折,最后得到成如图所示的形状,作为手臂。
两根手臂都弯折成同样的形状。
用尖嘴钳把两根曲别针拉直。
把曲别针沿着手臂的弯折结构进行弯折,从手臂上小孔位置前面一点开始,到手臂前端结束,长出的曲别针部分用尖嘴钳夹断。
然后借助透明胶布把弯折好的曲别针捆绑固定在手臂的内侧,作为给手臂加固用的骨架。
如图所示,把作为躯干的减速箱平放在桌面上。
把两片红色M3垫片分别套到两个传动大齿轮的螺杆上。
再在腿部的限位杆两端各套入一个红色M3垫片。
把手臂如图所示安装到减速箱上,其中传动大齿轮上的螺杆从手臂上的小孔穿出,而腿部的限位杆套到手臂后端的凹槽中。
大齿轮上的螺杆从手臂穿出之后,再套上一个M3红色垫片,然后在拧上一个M2螺母。
提示:这里不需要把螺母拧紧。
限位杆从手臂凹槽穿出之后,也再套上一个M3红色垫片。
从限位杆外侧套上一个塑料垫圈。
借助尖嘴钳,把塑料垫圈往限位杆内侧压进去。
让塑料垫圈压着M3垫片靠近腿部,但不会把手臂和腿部夹得过紧,而是留有一定的空隙。
把手臂上的M2螺母继续往里拧,使得M3红色垫片把手臂夹住,但不要夹得过紧,让M垫片与手臂之间有一点空隙。
然后用热熔胶把M2螺母与螺杆之间的部分粘起来。
两只手臂都用前面所述的方法安装到减速箱做成的躯干上。
接口——
这里我们采用PVCBOT里常用的PH2.0的插头作为可拔插的接口。“PH”是一种连接器件,其PH插头包括外壳和端子两个部分,“2.0”代表引脚之间的间距为2mm。
把一根长导线剪成两小根短的导线。
把两根导线分别焊接到减速箱上电机的两个电极上。
把两根导线的另一端分别焊接到PH2.0插座的两根引脚上。
如图所示,把PH插座放置到凹形支架与电机之间的空隙中。
然后涂上热熔胶把PH插座固定起来。
最后完成电路接口的组装。
头部——
选用宽度为2.5cm左右的PVC线槽,分别剪下两段都是长约2cm的线槽凹槽部分。
把其中一段线槽凹槽部分往一侧压,使得它往边上倾斜。
在该段线槽凹槽部分的前端(对应上一步图中的右侧),用铅笔画上倒梯形的标记线。
然后用剪刀沿着倒梯形标记线剪裁,有倒梯形这一面作为机器人的正脸。
把两块线槽凹槽部分叠加在一起。
其中倾斜且有倒梯形的一块为脸面部分(图中右侧),而另一块为头盖部分(图中左侧)。
脸面部分放置于头盖部分的内侧,其中脸面部分有倒梯形的一侧(正脸)与上面的头盖部分平齐(图中下部分),而脸面部分的另一端从头盖部分后端长出来一点,算是后脑勺。
脸面部分与头盖部分之间用502胶水固定在一起。
用镊子夹住红色的M3垫片,涂上502胶水后,粘贴在正脸在如图所以的位置上,作为机器人的一对大眼睛。
完成机器人的头部制作。
把做好的头部安装到减速箱做成的躯干上。
头部结构上的脸面部分的前后端正好夹住背部支架的顶端。
借助502胶水把头部结构和背部支架粘贴到一起。
完成头部的安装。
脚掌——
选取宽度为2.5 cm左右的PVC线槽的凹槽部分,截取长2.5cm的一段。
在凹槽部分的背面,分别距离两侧边缘0.5cm的位置,用铅笔各画一条与两侧边缘平行的直线。
用剪刀沿着画好的直线把凹槽的两个侧边剪下来。
把原来凹槽侧边上的轨道剪掉,再如图所示把底面侧边剪开一个斜角,得到脚掌的结构。
把脚掌的结构用502胶水粘贴在凹形支架的腿部前端。
整个肢体结构就基本成型了。
躯干——
选用宽度为2.5cm左右的PVC线槽的槽盖部分,截取长约3cm的一段。
把槽盖上的轨道槽的一侧用美工刀倾斜着削去一段,得到一块颇具立体感的胸板结构。
把胸板结构用502胶水粘贴在机器人的前胸部位。
至此,主体结构部分就算完成了。
2-电源:支架——
选用横截面为25*15mm左右的PVC线槽的凹槽部分,截取1.5cm长的一段。
把上面得到的线槽凹槽的一个侧边剪掉,再把剩下的那个侧边上的轨道裁切掉,得到一根L形支架。
用铅笔在L形支架底部如图所示位置作好要钻孔的标记。
其中大孔位于图中左上角的位置,大孔的中心距离最近两侧边缘都大约为6mm;小孔位于图中右下角的位置,小孔的中心距离最近两侧边缘都大约为4mm。
在L形支架的钻孔标记的位置钻好一大一小两个孔,其中小孔的直径2mm,大孔的直径3mm。
要求L形支架上的大孔可以同时穿过电池盒的两根导线。
用M2*6mm的平头螺丝/螺母把L形支架固定在电池盒的正极一端。
M2*6mm的平头螺丝可从电池盒正极的金属电极上的孔穿出,然后再串上L形支架,最后扭上螺母并拧紧。
在此之后,平头螺丝的螺帽部分将代替电池盒的金属电极变为电池的正极接点。
开关——
把电池盒的两根导线朝如图所示的方向拉直,并且在负极导线(黑色)稍微超过L形支架的位置把其剪断。
把电池盒在上一步被剪短的黑色导线,以及黑色导线被剪断得到的另一段,分别焊接到拨动开关的中间以及其中一个侧边的引脚上。
把拨动开关放置于L形支架的弯折角上,用热熔胶固定好。
导线——
对于从电池盒上引出的红色导线,以及拨动开关上连接的另一段黑色导线(剪断后得到的),把这两根红黑导线合成一股,在它们靠近电池盒的一端打一个结。
把红黑导线一并从L形支架的大孔中穿出。
注意:从这里可以看到,红黑导线打结的位置要控制好,使得打的结刚好卡在L形支架的大孔上,而导线从电池盒(以及开关)上引出到L形支架孔之间的部分恰到好处,既不会长出太多,也不至于拉扯导线时会牵扯到接点,也就是说打结的作用是保护导线的接点不会被扯断。
把红黑两根导线从L形支架引出的部分合在一起拉直,并且把引出的一端剪成一样的长度。
接口——
这里我们选用PH2.0的插头作为可拔插的接口。
“PH”是一种连接器件,其PH插头包括外壳和端子两个部分,“2.0”代表引脚之间的间距为2mm。
把两个端子从原来固其上的金属条上拆下。
用烙铁直接给端子凹槽中央上锡,然后把电缆导线焊接到凹槽中。注意凹槽中央两侧有各有一段突起的弯折片,在焊接好导线后用尖嘴钳把两侧的弯折片按下凹槽内侧,让其夹住导线的焊接点。
端子两侧有突起弯折片的一侧是端子的尾部,而呈管状通道的一侧则是端子的头部,导线是从端子的尾部穿入到中部。
再用尖嘴钳把端子后部两侧的突起也向内按下,夹住电缆的导线胶皮部分,这样相当于同时也让导线外皮也受力避免拉扯导致的导线断路。
把连接好导线的端子如图所示插入到PH的塑料插头中,如下图所示放置端子的插入方向。
注意:尽量用尖嘴钳把端子中部和尾部两侧突起的弯折围着导线夹好,让端子整体呈圆管状,以便端子可以顺利插入到PH插头中。
最后端子头部顶上有一个小突起可以卡住插头前端槽口上的卡片,让端子不至于会脱落。
注意:假如需要把端子退出插头,则需要先把插头顶部槽口里的卡片顶开,松开端子头部顶端的小突起,然后才能把端子从插头上卸下来。
完成的电源模块
3-总装:
LT-12结构平台的背部,有一个安装孔,DC-7A电源模块可以直接安装固定在吊绳攀爬结构平台的背上。
如图所示,把DC-7A电源模块放置于LT-12结构平台的背部。
用M2*6的螺丝从DC-7A电源模块的电池盒底面的小孔穿入,然后再穿过LT-12结构平台的背部上的小孔并从下面穿出,再用尖嘴钳夹住M2螺母送到内侧的螺丝前端,用螺丝刀把螺丝扭入螺母上并拧紧。
这样就把整个电源模块固定到结构平台的背部。
提示:DC-7A电源模块有开关的一侧朝下(相对机器人的头部)。
把DC-7A电源模块的PH插头插入LT-12结构平台的PH插座上。
完成整个吊绳攀爬机器人的制作。
四-调试完善:
给电池盒装上电池,打开点源开关。减速电机通电后,机器人的手臂会交替摆动。
这个时候要调整手臂的弯折角度,使得整个手臂摆动过程中,两只手臂不会碰到一起。
正常情况下,机器人的两个手臂应该是向前交替摆动的(所谓向前:由下往上同时由后往前)。这个时候机器人把机器人吊挂在绳子上,则机器人会向前方攀爬(相对面部来说)。
假如发现机器人的手臂摆动的方向相反了,在绳子上攀爬是倒退着的(相对面部来说),则说明电机连接的电源极性反了,可以把焊接在电机两个电极上的导线调换过来重新焊接。
把机器人的手臂勾在一根绳子上,让整个机器人吊挂起来。由于受到重力的作用手臂会被拉伸,所以此前调整好的手臂弯折角度可能需要修正。
打开电源开关,观察机器人手臂的摆动情况,必要时需要进一步调整手臂的弯折角度,使得手臂在向前摆动的过程中,即不会碰到一起往前攀爬,并且也能够勾住绳子不至于掉下来。
提示:一般而言,假如手臂勾不住绳子,可以把手臂最前端的一段弯折程度调大一些,不过也不能太大,否则又容易两个手臂卡在一起。
具体调整的经验,需要大家在实际过程中摸索和积累。
五-成品展示:
最终制作完成的吊绳攀爬结构平台。
六-关于比赛:
本项目适用于中小学或团体单位科技活动比赛。具体比赛形式可以参考如下:
1、作品制作
参赛选手使用大赛指定的器材完成参赛机器人的制作,并且在不改变机器人基本结构和功能的基础上,可以对于机器人的外形进行进一步的装饰和美化(含上颜色),整体外形除了可以参照官方的标准造型,还可以自由发挥设计新的造型。
参赛选手需自行准备工具和器材,事先做好作品然后于比赛当日把作品带到比赛现场。
2、外观评比
参赛选手提供做好的参赛作品供评委就外形、工艺、制作水平等方面进行评分,评分完成后,进入下一环节的比赛。
3、竞速比赛
参赛选手使用主办方统一发放的电池调试好参赛机器人。调试完毕后,参赛选手将参赛机器人放置于1米长的水平挂绳上爬行(具体长度可自行限制),裁判记录机器人爬行1米距离的时间。每个参赛选手有两轮机会,取最优成绩作为最终成绩,如果两轮均没完成行程,则该环节比赛记0分处理。
假如机器人中途发生异常而停止运动或从空中跌落,允许参赛选手人工调整后从原地开始继续比赛,但过程中计时不停止,并且每人工调整一次最终成绩增加10秒(每次调整时间不能超过1分钟,并且每轮最多允许三次人工调整)。
-
机器人
+关注
关注
211文章
28396浏览量
206979
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论