 一种非常简单但功能强大的机械手,叫作SoftHand 2
一种非常简单但功能强大的机械手,叫作SoftHand 2

机器人圈子里有个段子,一旦发生了机器人动乱,你只要在家关好门就能自保,因为现在的机器人还不会开门。尽管目前的机器人在精度、速度、一致性要求很高的任务上表现优异,但它们仍不能很好地完成操纵门把手这样日常生活中的基本任务。这是由于人类根据自己的身体特点创造了人造环境的大部分设计,而机器人要能在其中实现自主导航、操作,就必须拥有和人类一样的感知能力和一双灵巧的手, 而这也恰是自然界中最精密复杂的机械结构。
目前对于机械手的研究和应用十分火热,而抓取一直是其中最为重要的研究热点。最近,比萨大学和意大利理工学院的研究人员开发出了一种非常简单但功能强大的机械手,叫作SoftHand 2,只需两台电机即可运行。而著名的灵巧机械手Shadow Dexterous则需要20个马达,和昂贵的价格。
像其他机械手一样,SoftHand2也是通过“肌腱”的原理,也就是利用线缆来拉动手指,但线缆以一种更新颖的方式排列。它不使用一串电缆连接到单个手指,而只使用一条驱动缆绳通过滑轮组迂回连接每个手指。这看起来虽然没那么灵活,但是能够极大地减少成本和功耗。
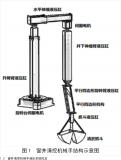
机械手SoftHand2的结构,驱动方式和缆绳缠绕方式
在最初设计这一机械手时,研究人员只用了一个电机构建一个更简单的版本,SoftHand。负责系统开发的机器人专家Cosimo Della Santina表示“只用一个电机实现控制的基本思想在于当你转动马达时,肌腱的长度会缩小,这样就会迫使手掌合拢”。
由于关节的弹性,会让肌腱和手指再次舒展成平坦的手掌。如果你想用它来抓球,效果会很好。但因为手指们需要或多或少的一致移动,但这样的构造不足以进行精细的操作任务。
SoftHand2的各种手势
通过增加一个电机,SoftHand 2能够显著地提高灵活性。让我们来看看上面的图片,每个肌腱的末端都会连接到手腕上两个马达中的一个。如果以相同的方向运行电机,肌腱的长度会缩短,那么就能得到图中a、b、c、d的手势,这与单电机版本的SoftHand原理相同。反之,如果在相反的方向上运行电机,那么就会出现e、f、g、h的手势,一个电机会释放肌腱,而另一个电机则将它卷入。
两个电机不同的驱动状态和对应的手势,以及一些应用
Della Santina 说,“如果一个肌腱穿过了很多的滑轮,那么肌腱的张力就会变得不恒定”。比如,如果一个电动机正在拉动,则肌腱末端的张力会提高。如果这时候另一个电机正在放出肌腱,那么该方面的张力会降低。通过这种方式利用张力,SoftHand所需的控制电缆要比典型的机械手要少得多,同时仍然可以让所有这些手指摆动。
你看看上面的GIF动画,就可以看到明显感受到添加一个额外电机产生的差异。左边只有一个电机,右边用了两个电机。单电机版本简单粗暴的抓取方式需要让所有的手指包裹住球。然而,两个电机版本可以让肌腱的张力不同,从而可以更灵巧的只用两个手指捏住球。 手指捏的纸币效果也一样,如下。
尽管SoftHand只使用了两个电机,但它仍可以完成一系列令人印象深刻的操作。
它还可以和各种机械臂组合实现更复杂的功能。
它可以伸出食指来拉开工具箱,或将一张纸从桌面上拖下来,甚至还可以拧开罐子。
工作累了来杯茶
哪一天,说不定还能给你打电话呢~
卡内基梅隆大学的机器人专家Lerrel Pinto说,“要让机器人能够学习并执行炫酷的任务往往要求系统十分可靠且相对复杂,但这通常也就意味着高昂的价格。SoftHand机械手能够做到价廉物美实属不易,相对而言,它是经济实惠的,因为越多的电机意味着成本越高。但它能够用于自主学习吗?它足够可靠和鲁棒吗?能够胜任成千上万次的抓取吗?这些实际应用中的问题都有待更深入的研究。”
SoftHand2对于实现一些需要灵巧操作的场合十分有用,虽然不能像更复杂的机械手一般灵活,但它通过简单的方式提供了更灵巧的抓取功能。相信随着研究的深入,它会给我们更惊艳的表现。
如果你也想做一只这样灵活的额机械手,那么看看下面的图纸和论文,操练起来吧~~
-
机器人
+关注
关注
214文章
31633浏览量
224414 -
电动机
+关注
关注
75文章
4211浏览量
101911 -
机械手
+关注
关注
7文章
362浏览量
31625
原文标题:谁说简单的机械手不可以灵巧啦?意大利研究人员开发出一款简易但功能强大的机械手SoftHand 2
文章出处:【微信号:thejiangmen,微信公众号:将门创投】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
机械手 OEM 的应用
机械手驱动系统设计要点
【GoKit申请】六轴智能机械手
一种工业机械手的PLC控制
PLC在机械手步进控制中的应用

基于PLC的机械手混合驱动控制

雄克小型机械手MPG-plus,它是凭借什么征服了Denk公司?
一种极其简单、但功能惊人的机器人手名为SoftHand 2
怎么去设计一种基于AMESim的窨井清挖机械手液压系统呢?




评论