 哪种类型的传感器才能实现真正自动驾驶?
哪种类型的传感器才能实现真正自动驾驶?
根据当前主要汽车厂商和众多第三方供应商所进行的研究,业界似乎已经达成某种共识,即自动驾驶汽车需要应用多种类型的传感器,以感知并测绘车辆周围的环境。
围绕自动驾驶车辆新技术应用的一个重要问题,是哪种类型的传感器或传感器组合能够提供最佳的价格和性能。
这个问题很复杂,因为只有在用于控制车辆的系统能力得到表征之后,才能按要求选择用于执行特定任务的传感器。自动驾驶车辆按定义可以包括三种主要系统组件。
第一种,负责感知车辆周围的环境;
第二种,测绘车辆周围的环境,然后使其能够在任何时间确定其位置;
第三种,在各种行车场景下负责自动驾驶车辆的决策能力。
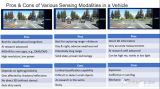
根据当前主要汽车厂商和众多第三方供应商所进行的研究,业界似乎已经达成某种共识,即自动驾驶汽车需要应用多种类型的传感器,以感知并测绘车辆周围的环境。Robert Bosch(罗伯特·博世)、Aptiv(安波福,拆分自德尔福)和Continental(大陆)的工程师都认为自动驾驶汽车需要利用雷达、摄像头以及激光雷达(LiDAR)系统来捕获数据。这些传感器技术可以相互补充,在白天和夜晚、雨、雾或雪等天气中提供最佳的可靠性。
事实上,Ford(福特)、General Motors(通用汽车)、Volkswagen(大众)和Nissan(日产)等主要汽车厂商的开发人员似乎也都对此表示认可,因为它们都相继展示了采用各种类型传感器的自动驾驶汽车。
大多数厂商的自动驾驶试验车辆均采用了包括摄像头、雷达和LiDAR在内的多种传感器技术。
自动驾驶汽车传感器市场预测数据来源:《自动驾驶汽车传感器-2018版》
据麦姆斯咨询报道,2022年预计自动驾驶汽车市场应用的激光雷达市场营收将达到16亿美元,雷达市场营收将达到4400万美元,摄像头市场营收将达到6亿美元。通常,摄像头构成了大多数汽车传感系统的核心,它们能够捕捉车辆周围环境360°视场(FOV)的完整图像。当然,也可以使用24GHz短程雷达(SRR),以及77GHz频段的远程雷达(LRR)系统。
另一方面,LiDAR系统可提供最远300米、360°视场范围内,垂直和水平分辨率高达0.1°的实时3D数据。装配在车辆中使用时,LiDAR系统可以从车辆周围固定和移动的物体捕捉密集的3D点云数据。而发射和接收无线电波而非激光的雷达系统,可以与LiDAR系统互补,因为它们可以用于提供低反射率物体的速度和方位数据。远程雷达传感器可以跟踪高速物体(例如迎面驶来的车辆),而短程雷达传感器则可以提供车辆附近的移动物体的丰富信息。另一方面,摄像头则可以测量物体反射或发射的光,进一步增强车辆周围物体本身的细节。
自动驾驶车辆如果包含所有上述类型的传感器,可以确保其中一种传感器的固有技术局限,能够被一个或多个其他传感器的优势所补偿。然而,如果采用这种方案,那么问题就在于必须开发一种车载处理模型,来处理由各种传感器捕获的大量数据。数据融合处理这一难题的一种方案,是将来自车辆上的多个传感器源的数据,在处理之前在空间上、几何上和时间上进行对准融合,这会带来一个庞大的单个传感系统。
博世的工程师正在开发一种自动驾驶车辆网络,该网络可以将来自车辆中所有传感器的数据在一种被称为“传感器融合”的过程中进行整合。这些传感器数据由车辆中的电子控制单元评估,以规划车辆的行驶路径。为了实现安全性和可靠性最大化,必要的计算工作由许多并行工作的处理器共同完成。不过,Intel(英特尔)/Mobileye的工程师则正在开发一种不同的方案,来努力攻克他们认为不能扩展,因而成本很高的一种自动驾驶车辆控制系统。
英特尔/Mobileye提出了一种完整的数学模型,以确保自动驾驶汽车以安全的方式运行。这种被称为“Responsibility-Sensitive Safety(RSS)”的模型,为人类的责任和谨慎概念提供了具体且可衡量的参数,并定义了一种“安全状态”,旨在无论其他车辆采取何种反应和行为,防止自动驾驶车辆成为事故的诱因。多传感系统他们已经展示了一种仅配备摄像头的自动驾驶汽车,作为其策略的一部分,将包括在公司构建的所谓的“真正冗余”的系统中。现在,他们打算构建一个由多个独立设计的传感系统组成的传感系统,以补充基于摄像头的系统,其中也包括了雷达和LiDAR。来自摄像头的数据融合将用于定位车辆,来自雷达和LiDAR的数据融合将在规划车辆轨迹的后期使用。
这种方案将带来基于众包的地图创建,然后将其上传到云端。然后,所有自动驾驶车辆可以通过蜂窝网络等现有通信平台接收这些地图数据。由众多传感器捕获的如此大量的数据,将需要新的车载计算基础设施,来实现大规模数据的车辆内传输。据ABI Research自动驾驶高级分析师James Hodgson称,由摄像头、雷达、LiDAR以及超声波传感系统等多种传感器产生的数据量,每8小时可达到32TB。
为了定义可以处理如此高数据速率的基础设施,Aquantia、博世、大陆、NVIDIA(英伟达)和大众汽车建立了自动驾驶汽车网络联盟。通过合作,这些公司计划在自动驾驶汽车内部搭建数千兆位的以太网,同时解决与噪音和抗扰、功耗、可靠性以及安全标准相关的挑战。
这种在交通状况中学习的系统过程被称为“深度学习”,并从中得出自己的推论,从而提供一系列行动方案。然而,由于这种人工智能系统的运行概率问题,因此业界担心它们的可靠性可能不够。为此,Mobileye等公司正在人工智能决策解决方案之上,增加一个单独的、确定性的软件层。
Mobileye的RSS模型将人类安全驾驶的理念,形式化为具有逻辑上可证明的可验证模型,定义恰当的响应,并确保自动驾驶车辆仅做出安全的决策。其模型本身负责基于来自路径规划系统的结果来验证车辆的轨迹,路径规划系统则基于车辆传感器获取的数据创建行动计划。安全验证和认证显然,无论在自动驾驶车辆中使用何种软件,都需要进行验证和认证,以确保自动驾驶车辆做出的决策是安全的。
事实上,自动驾驶车辆可能会遇到各种各样的潜在行驶状况,在这种车辆中验证所使用的软件采用何种适当的安全等级所涉及的挑战,可能是工程师面临的最大挑战之一。特别是考虑到所使用的许多人工智能软件系统本质上是非确定性的,因此测试很困难。因此,虽然一些供应商可能会认为创造真正的自动驾驶汽车的技术挑战已经解决,但自动驾驶功能仍然依赖于广泛的软件验证,更不用说监管部门的批准了。直到这些问题也被解决,完全自动驾驶车辆本身,可能还需要几年时间。
-
传感器
+关注
关注
2551文章
51192浏览量
754399 -
自动驾驶
+关注
关注
784文章
13844浏览量
166571
原文标题:如何制造实现真正自动驾驶的传感器?
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
FPGA在自动驾驶领域有哪些应用?
自动驾驶真的会来吗?
自动驾驶的五大传感器各有千秋
这些自动驾驶传感器,你了解多少?
传感器成自动驾驶“硬实力” 有哪些
传感器对于自动驾驶汽车的作用
真正的自动驾驶何时才能到来
自动驾驶汽车中的三种传感器技术介绍
自动驾驶的传感器种类以及布置方案
实现自动驾驶需要多少传感器?成本是个问题





 工商网监
工商网监
评论