 利用Matlab/Simulink对多电平直接转矩控制进行仿真验证研究
利用Matlab/Simulink对多电平直接转矩控制进行仿真验证研究
1、引言
中高压大容量电机的变频调速改造是国家节能减排工作的重点。中高压变频器的主功率电路普遍采用多电平逆变器拓扑,以达到降低功率器件的耐压等级、减小dv/dt、改善谐波等效果[1]。其中,H桥级联型结构的多电平逆变器在中高压电机的变频调速领域技术最为成熟,应用最为广泛。
目前,中高压变频器的产品中,电机调速控制策略多采用V/F控制或矢量控制(又称磁场定向控制),而直接转矩控制(Direct Torque Control,简称DTC)方面的研究与应用较少,实现难度较大。主要原因之一在于多电平拓扑的开关管数目众多,造成传统DTC所需要的开关向量表非常复杂。另外,传统DTC采用滞环比较器,逆变器开关频率不固定,难以数字实现,生成多电平波形较为困难,电流、转矩脉动较大。
实现DTC等高性能调速策略需要检测电机的转速,但速度传感器的安装增加了系统的复杂性、成本和维护要求,降低了可靠性和鲁棒性。
本文针对级联多电平的特点,将错时采样空间矢量调制法和无速度传感器技术引入到级联多电平直接转矩控制中,解决了传统DTC应用在多电平领域所存在的开关向量表复杂、波形质量不好、转矩脉动大等问题,具有直流电压利用率高、功率单元使用均衡、谐波含量好、方法简单、易于数字实现等优点。利用Matlab/Simulink对这一方法进行了仿真验证。
2 、多电平直接转矩控制的难点
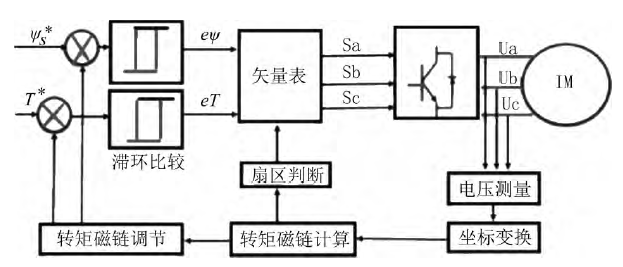
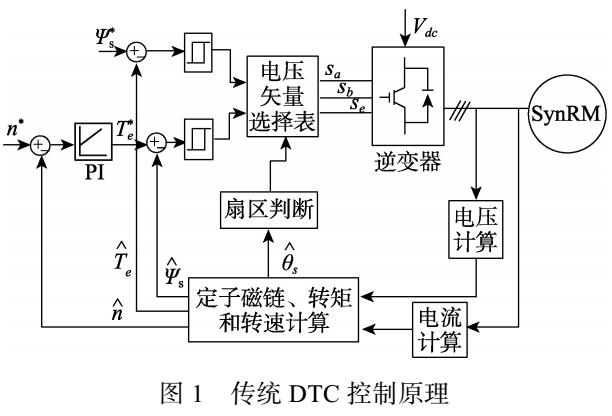
传统的直接转矩控制采用磁链与转矩的砰—砰控制,根据它们的变化与定子磁链所在的空间位置直接选择电压空间矢量的开关状态,获得快速的转矩响应。但是其实际转矩在滞环比较器的上下限内脉动,开关频率也不固定。一种改进方案是将空间矢量调制(SVM)方法与DTC相组合,对转矩进行闭环PI调节,以电压空间矢量调制模块取代开关向量表,产生PWM波控制逆变器的开关状态,可使开关频率恒定,转矩脉动也大幅减小。
然而,在多电平领域,逆变器的基本空间矢量数目众多,对于每相n个H桥级联单元即 级级联的多电平逆变器,其基本空间矢量数目为(2n+1) 3个。每相3单元的高压变频器基本空间矢量多达343个,而对于每相6单元的高压变频器,这个数目达到了2197个。如此繁多的基本空间矢量使空间矢量选择算法变得非常复杂。另外,空间矢量的选择要考虑功率单元的开关负荷均衡,这就对算法提出了更高的要求。因此,在电平数较多的情况下,空间矢量算法实现困难,也难以满足实时控制的要求。
为克服上述问题,在级联多电平中采用错时采样空间矢量调制(Sampe-Time-Staggered Space Vector Modulation,简称STS-SVM)策略,能大大降低空间矢量选择的复杂度,并且能够实现开关负荷的自动均衡,执行效率高,易于实现无速度传感器DTC等高性能实时控制。
3 、错时采样SVM策略
错时采样空间矢量法最早是应用在如图1所示的组合变流器结构,此变流器由N个3相6开关管的逆变器单元组成,输出通过变压器耦合。STS-SVM的基本思想是在每个变流器单元中按照传统两电平空间矢量的方法进行参考电压的采样,采样周期为Ts,将相邻单元的采样时刻错开Ts/N。这样,系统等效的基本空间矢量数目大大增加,得到的输出电压具有多电平的形式,相电压电平数为2N+1。
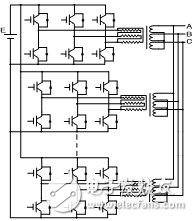
图1 组合变流器拓扑
组合变流器与3相H桥级联型多电平逆变器在拓扑上具有转换等效关系。将图2(a)中的两级多电平变流器经变换后可等效为图2(b)中的一级3相H桥结构,等效的开关管在两幅图中以相同的编号表示,即一级H桥中左桥臂的开关管和右桥臂的开关管可分别等效为多电平变流器的两个3相6桥臂单元。这样就可将STS-SVM调制法用于一级3相H桥。具体方法是用STS-SVM方法得出图2(a)中的开关管的驱动信号,去驱动图2(b)中相同编号的开关管。由于两级变流器中N=2,因此两个单元的采样时刻错开Ts/2。转化到图2(b)中,相当于对一级3相H桥逆变器左桥臂的6个开关管和右桥臂的6个开关管分别进行相同的幅度和频率调制比下的两电平空间矢量调制,并且要使两者参考电压的采样时刻错开Ts/2。
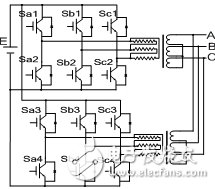
(a)两级多电平变流器
(b) 一级三相H桥逆变器
图2 两级组合变流器与一级三相H桥逆变器的等效关系
根据上述思想进行扩展,对于n级H桥级联的逆变器,可以等价为2n个单元的组合变流器,相邻的两级H桥单元同一侧桥臂的采样时 刻应相互错开Ts/2n。
由上述分析可以得到在n级H桥级联型逆变器中应用错时采样调制策略的实现方法。只要根据传统两电平空间矢量算法得出某一级H桥中三个同侧桥臂的驱动信号,系统中其它各开关管的驱动信号即可通过相应的延时得到。两电平空间矢量算法在主控制器中进行,延时可通过在主控制器外增加硬件单元来实现。这样就大大减轻了主控制器的负担,能够适应快速实时控制的要求。
STS-SVM中,系统总体输出电压矢量的安排是自动完成的,由两电平空间矢量算法得出的各个桥臂触发波形自身具有对称性和均衡性,因此总体开关负荷也是均衡的。
4、 STS-SVM无速度传感器DTC系统
相对于普通的多电平空间矢量算法,STS-SVM控制算法简单,开关负荷均衡,使得主控制器实现复杂的无速度传感器直接转矩控制等算法成为可能。
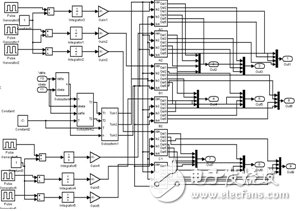
图3为基于STS-SVM的级联多电平无速度传感器DTC控制系统的总体结构。图中速度调节器、转矩调节器、磁链调节器均为比例积分调节,转矩调节器需要在PI调节前采用限幅,以免过大的转矩误差造成过电流冲击。系统总采用STS-SVM模块产生PWM波控制逆变器的开关状态,摒弃了复杂的开关矢量表。另外,由于未使用滞环比较,系统的采样频率是固定的,更易于数字实现。
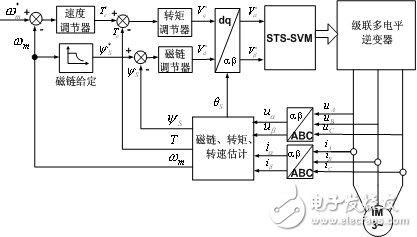
图3 基于STS-SVM的无速度传感器DTC系统结构
4.1 STS-SVM调制的多电平逆变器
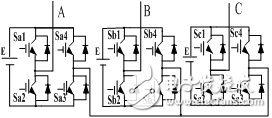
此处,多电平逆变器为图4(a)所示的三级H桥级联型拓扑。STS-SVM模型中的驱动信号的产生通过两电平空间矢量算法得出的调制波与各个开关管对应的三角波进行比较来获得,如图4(b)所示。各个三角载波存在一定的移相关系,这样就等效地实现了采样周期的相互错开。
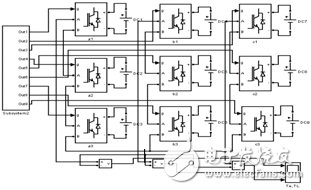
(a) 三级级联多电平逆变器主电路
(b)STS-SVM驱动信号产生单元
图4 级联多电平主电路与PWM产生单元
4.2 磁链与转矩观测
定子磁链的估计大体上可以分为三种模型,即u-i模型,i-n模型,u-n模型。其中u-i模型中磁链表达式为
 (1)
(1)
其中,,us,is,Rs分别为定子磁链、电压、电流值与定子电阻值,可见,u-i模型观测定子磁链无需转速信息,唯一所需了解的电动机参数是定子电阻Rs,因此十分适合在此处应用。
直接转矩控制需要实测电磁转矩Te作为反馈量,一般采用计算法。电磁转矩具有多种不同的表达式,可以采用定子电流、转子电流、定子磁链、转子磁链中的任意2个参数来获得电磁转矩。在直接转矩控制中,通常采用如下的公式计算Te:
 (2)
(2)
其中,Pn为电机的极对数。
在Matlab/Simulink中建立磁链与转矩观测的模型,如图5所示。
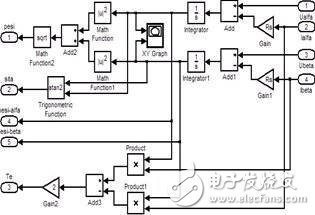
图5 定子磁链与转矩观测模型
4.3 速度估计
基于模型参考自适应系统(Model Reference Adaptive System,MRAS)的转速辨识实现较为方便,且具有对转子电阻变化的完全不敏感性,电机参数变化对转速估算的影响也较小。转子磁链的电压模型与电机转速无关,而转子磁链的电流模型与电机转速有关,因此选择转子磁链的电压模型作为参考模型,而选择转子磁链的电流模型作为可调模型。
由于在磁链观测中已经估算出定子磁链,因此参考模型可以用定子磁链表示:
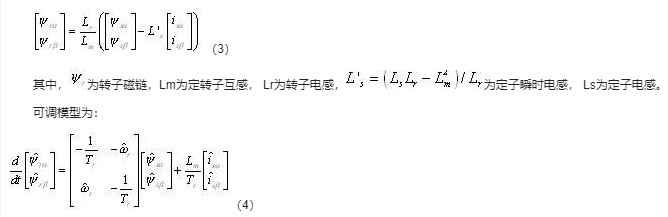
其中Tr=Lr/Rr为转子时间常数,Rr为转子电阻,![]() 为转子角速度。
为转子角速度。
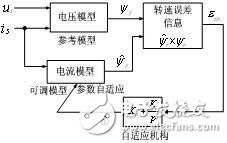
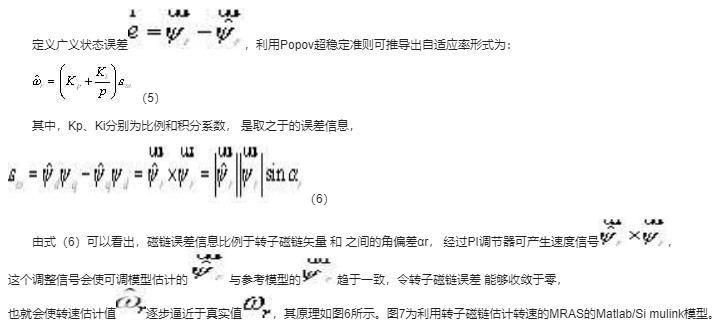
图6 利用转子磁链估计转速的MRAS方案
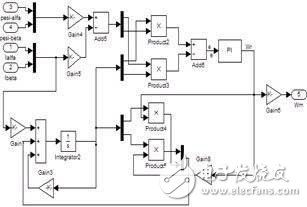
图7 转速估计模型
5 仿真结果及分析
在Matlab/Simulink中建立了整个系统的仿真模型。其中,电机模型采用软件自带的两级三相异步感应电机模型,参数为:额定功率PN =3730W,额定线电压UN =380V,额定频率fN =50Hz,转子电阻Rr=1.083Ω,定子电阻Rs=1.115Ω,定子、转子电感Ls= Lr=0.2097H,定转子互感Lm=0.2037H,转动惯量J=0.02kgg㎡。逆变器每级直流电源电压为104V,采样周期Ts=952µs。

在0.3s处突加6Ngm的负载。各个变量的仿真波形如图8所示。
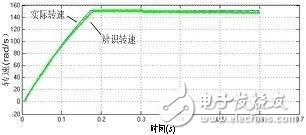
(a)辨识转速与实际转速
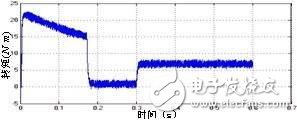
(b)转矩动态相应
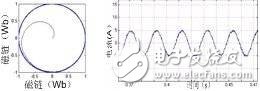
(c)定子磁链 (d)电流
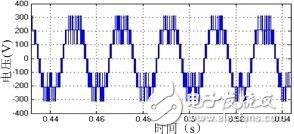
(e)相电压
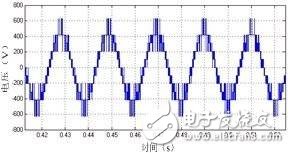
(f)线电压
图8 系统仿真波形
由仿真波形可以看出,电机启动后0.2s,系统基本进入稳定状态;辨识转速能较好地估计与跟踪实际转速;相电压输出7电平;线电压输出13电平;电流波形良好;稳态时磁链与转矩脉动都比较小;启动过程中定子磁链能很快达到给定值,并保持圆形;启动时转矩迅速达到限幅值(23Ngm),之后逐渐回落到空载稳定值,加载时动态响应特性良好。
6 结论
本文将错时采样空间矢量调制方法、模型参考自适应方法与直接转矩控制相结合,实现了级联多电平变频器的无速度传感器直接转矩控制,有实现简单、可靠性高、转矩脉动小等诸多优点,具有较好的实用价值。文中给出了各个部分的建模方法,通过仿真对这一方法进行了验证。
责任编辑:gt
-
传感器
+关注
关注
2551文章
51195浏览量
754429 -
matlab
+关注
关注
185文章
2977浏览量
230620 -
变频器
+关注
关注
251文章
6565浏览量
145053
发布评论请先 登录
相关推荐
永磁同步电机直接转矩控制系统中的MATLAB/Simulink建模方法
利用Simulink对负载转矩脉动进行仿真
基于空间矢量的同步磁阻电机直接转矩控制
基于MATLAB/simulink的直接转矩控制离散仿真系统的研究分析

三相异步电动机直接转矩控制系统的matlab/simulink实现






 工商网监
工商网监
评论