 基于神经网络控制器的设计方法及仿真验证
基于神经网络控制器的设计方法及仿真验证
1、引言
导弹的运动模型是一个十分复杂的非线性变参数模型。反馈线性化是一种重要的非线性控制方法,其基本思想是通过状态变换,将一个非线性系统的动态特性全部或部分变换成线性特性,从而用成熟的线性控制方法来解决问题。实现反馈线性化通常有两种方法:微分几何和动态逆方法。微分几何方法需要数学工具很多,不宜工程上的推广和应用;相比较而言,动态逆方法直观、简便,在工程应用上,更易于实现。
在实际应用中,Kim等将导弹动力学分成快变和慢变两个动力学子系统,然后对两个子系统分别采用动态逆方法进行设计。Schumacher对该方法进行了稳定性分析,并指出当内回路带宽足够大并且执行机构不饱和时,可保证系统的稳定。该方法突出的缺点是设计的控制系统鲁棒性比较差。
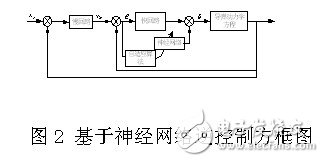
由于动态逆方法需要被控对象精确的数学模型,但在实际应用中,被控对象数学模型不可能精确得到。这是造成动态逆控制系统鲁棒性差最主要的原因。本文根据以上文献的设计思想,将导弹的动力学方程分解成为快慢两个动力学子系统,对两个子系统分别进行动态逆设计。其中,快回路采用基于神经网络的自适应滑模逆控制器的设计方法,应用李亚普诺夫综合法,设计出神经网络控制器,并给出神经网络权值更新算法。仿真结果验证了本文方法的正确性。
2、导弹的动力学模型
为了便于利用成熟的线性控制系统设计理论进行设计与分析,通常将上述弹体模型进行简化,为此需要作如下假设:
(1)仅考虑导弹的短周期运动,认为导弹运动速度变化缓慢,可将导弹飞行速度视为常数。
(2)对于弹体运动过程中的攻角和侧滑角等小量参数,可以略去它们之间的乘积并简化三角函数的高次项,即认为

(3)忽略舵机的非线性,忽略速率陀螺和加速度计的动态特性。
(4)仅考虑空气动力和推力的作用,忽略重力的影响,在设计过程中这可以通过在控制指令中增加重补进行补偿。
在以上假设条件下,得到如下的弹体简化模型:
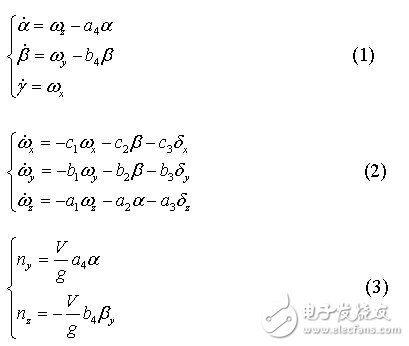
式中各动力学系数
3、按时标分离原则生成子系统
以俯仰通道稳定回路为例来说明本文的设计思想。俯仰通道的简化模型为:
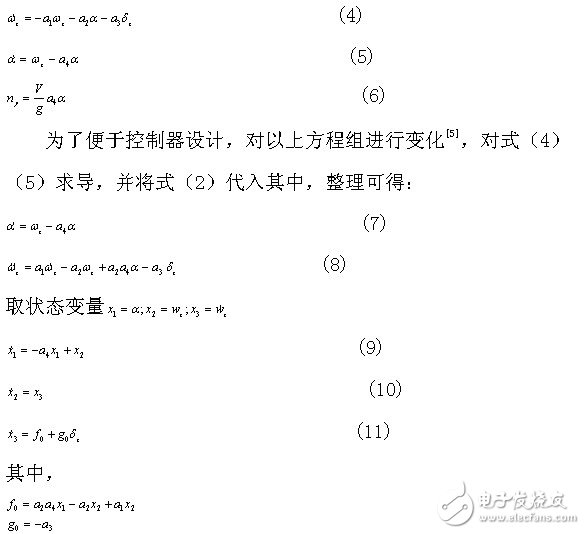
从而得到了以纵向攻角、弹体俯仰角速度和角加速度为状态变量,以纵向过载为输出的状态方程。
根据上述状态方程,按照时标分离的方法,将弹体的纵向通道分成快慢两个动力学子系统。其中,式(9)代表慢变子系统,式(10)、(11)代表快变子系统。下面对两个子系统分别进行动态逆设计。
4、动态逆控制器设计
4.1 慢变子系统动态逆设计
对于慢变子系统采用传动的动态逆设计方法。根据时标分离的控制策略,慢变子系统的控制量为快变子系统的输出量

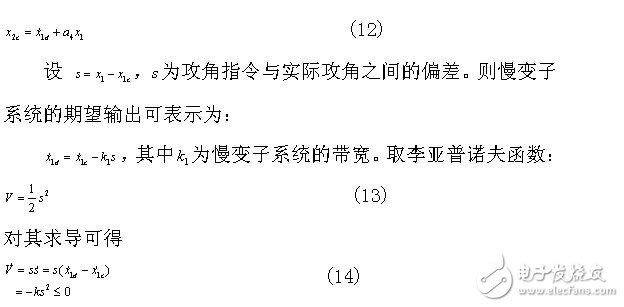
因此慢变子系统稳定。
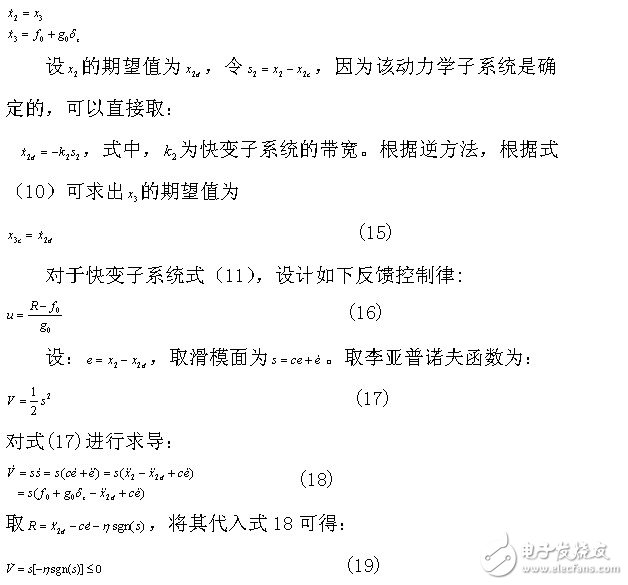
4.2 快变子系统动态逆设计
对于式7、8式组成的状态方程
从而,所设计的控制律能够保证系统的稳定性。
4.3 快变子系统自适应滑模逆控制器设计
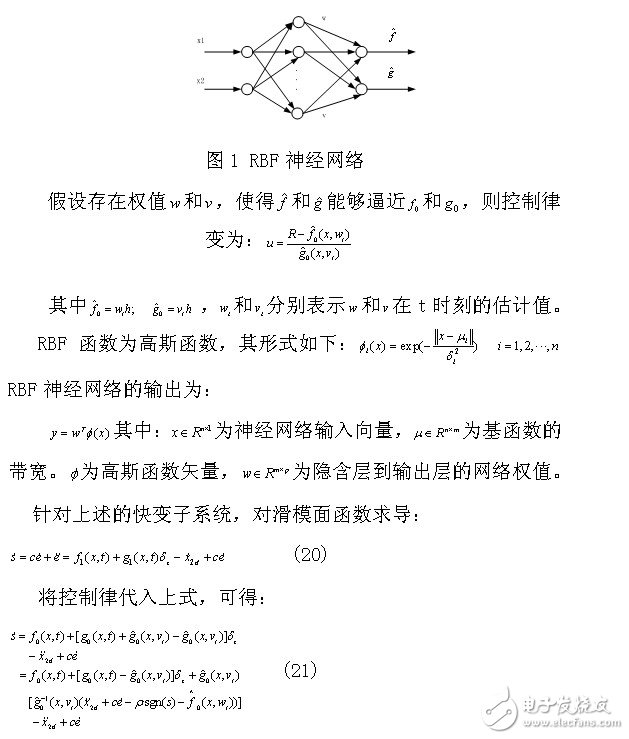
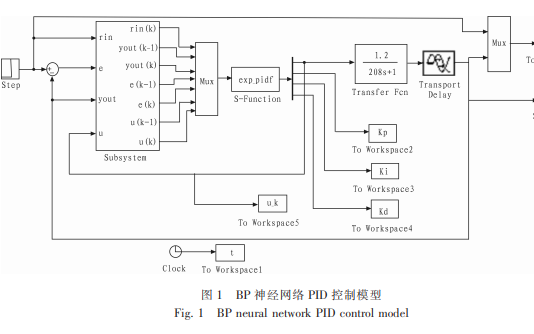
在导弹飞行控制中,由于参数变化剧烈, 和 无法准确得到。RBF神经网络对非线性系统具有唯一最佳逼近的特性。所以,构造RBF神经网络,使其输出 和 来逼近 和 。RBF网络模型如图1所示:
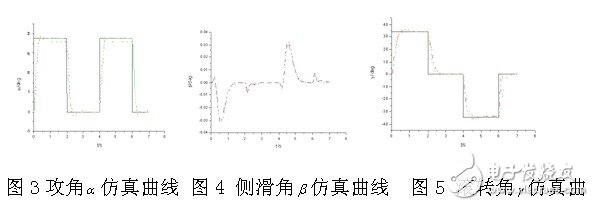
5、仿真结果分析
6、结论
基于导弹非线性控制模型,应用时标分离动态逆方法设计了一种非线性导弹控制系统。该方法通过引入神经网络,将动态逆方法与自适应滑模控制相结合,有效的消除了建模误差对整个系统的不利影响,增强了控制系统的鲁棒性,适合于复杂的导弹控制系统设计,具有良好的应用前景。
-
控制器
+关注
关注
112文章
16376浏览量
178219 -
神经网络
+关注
关注
42文章
4772浏览量
100807 -
仿真
+关注
关注
50文章
4087浏览量
133648
发布评论请先 登录
相关推荐
如何利用SoPC实现神经网络速度控制器?
基于BP神经网络控制+Simulink双闭环直流调速系统仿真设计
基于BP神经网络的PID控制
基于RBF 的模糊神经网络控制器设计与仿真分析
基于PLC的神经网络PID控制器设计
神经网络PID控制策略及其Matlab仿真研究
CMAC神经网络模糊控制器设计

如何使用S函数实现BP神经网络PID控制器及Simulink仿真的资料说明





 工商网监
工商网监
评论