 基于80C196单片机和CAN总线的全数字电动执行器的设计
基于80C196单片机和CAN总线的全数字电动执行器的设计
本文所设计的全数字电动执行器,是在湘仪电子电器设备厂的9610R系列的全电子式电动执行器的电机驱动电路基础上所做出的进一步的改进。我们将控制部分用基于80C196单片机的数字控制代替原有的模拟控制,以提高具控制的精度与运行的可靠性。同时,为方便调试,增加了红外遥控的功能和基于CAN总线的通信功能,以适应现代工业控制的需要。
1 原全电子式电动执行器的特点
原9610R系列的全电子式电动执行器是以220V交流单向电源作为驱动电源,驱动电机采用单向交流电机,位置反馈采用高性能导电塑料电位器。
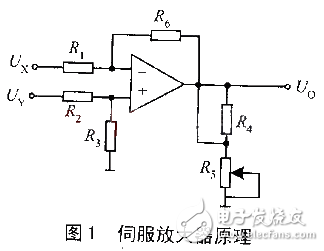
伺服放大器的原理如图1所示。
①当UY=0时,
K_=Uo/Ux=-[(R4+R5)/R5]×(R6/R1)
②当Ux=0时,
K+=Uo/UY=[R3/(R2+R3)]×[(R4+R5)/R5]×(1+R6/R1)
根据线性叠加原理,Uo=K+UY+K_UX。
由上可知,由于电阻很难做到完全匹配,所以原9610R电动执行器存在着电机正反转不对称的问题。电机驱动电路如图2所示。
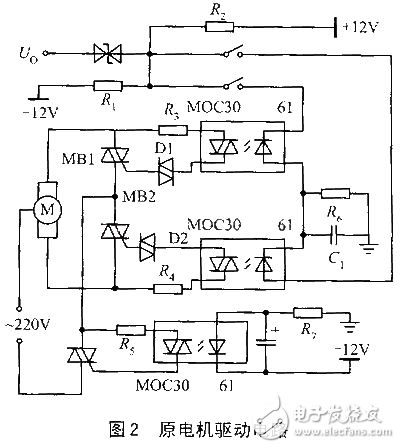
图2中,Uo为从伺服放大器来的电压信号,当Uo>0.7V时,电机正转;当Uo<-0.7V时,电机反转。C1为控制电机制动的电容。
重新设计的全数字电动执行器对电机的驱动电路进行了改进,用±12V的开关量信号的时间长短来控制电机的正反转,并实现了电动执行器的制功与反向截止功能。新的电机驱动电路如图3所示。
图3中,Ukp和Ukn分别为80C196的两个高速输出引脚,T2-1/T2-2、T3-1/T3-2、T4-1/T4-2、T5-1/T5-2、T6-1/T6-2、T7-1/T7-2分别为6个光电隔离器。当Uk为+5V高电平时,T2-1/T2-2导通,从而T*-1/T6-2导通使电机正转;当Uk由高电平到低电平的瞬间,T4-1/T4-2瞬间导通,使得T7-1/T7-2瞬间导通,电机瞬间反转,电容放电结束后电机停止;同理,当Uk为0V低电平时,电机反转。这样便实现了电机正反向控制。
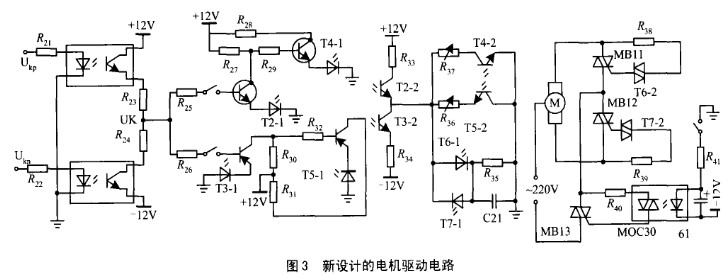
系统输出与驱动电路之间完全实现了光电隔离,这样可提高系统的抗干扰能力和可靠性。
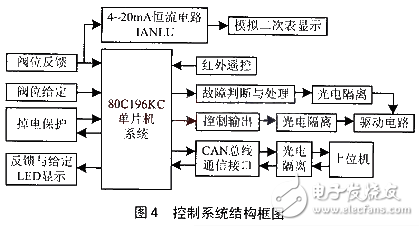
2 控制系统结构
以80C196KC单片机为核心的全数字电动执行器的控制系统结构如图4所示。图4中,除80C196KC单片机外,还选用了X25043实现掉电保护功能,以MAX7219驱动LED数码管显示阀位的给定值与反馈值以及阀位的状态与控制方式;同时,以改进的4~20mA恒流电路直接将阈位反馈信号转换成4~20mA的信号送至室内模拟二次表显示,以保证其模拟与数字控制的兼容性。利用80C196KC内部的A/D转换口,将阀位反馈与阀位模拟给定信号转换成10位的数字信号,用软件判断阀位故障(堵转,超限),进行故障处理(报警或停机),在控制输出端与故障处理端用MOC3061光电隔离将单片机系统与电机驱动电路隔离开来,达到抗干扰的目的。
选用1838红外遥控接收解码一体化集成芯片,接收来自遥控器的红外遥控信号。CAN控制器采用Philips的SJA1000集成芯片,CAN总线驱动选用82C250集成芯片,在SJA1000与CAN总线驱动82C250之间用6N137快速光隔进行光电隔离处理,与单片机接口实现单片机与上位机的通信功能。
各部分的主要硬件电路介绍如下。
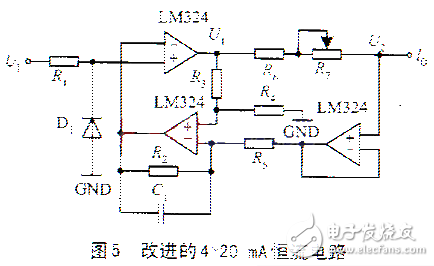
(1)改进的4~20mA恒流电路
整个恒流电路,由1片集成的4通道运放LM324和6个精密电阻、1个可调电阻、1个瓷片电容及1个二极管组成,电路结构非常简单,电路如图5所示。图5中,R1=R2=R3=R4=R5=100kΩ,R6=200Ω,R7为0~100Ω可调电阻。
从图5电路可知:在R2、R3、R4、R5这四个电阻匹配得比较好的情况下,U1-U2=U1,通过调节R7使得R6+R7=250Ω,从而Io=U1/250Ω达到使1~5V电压转换成4~20mA的目的,且不论输出端的负载如何变化,这种关系都不会发生变化,达到恒流的目的。为为使该恒流电路可带的负载尽量大,集成运放LM324的电源最好用+18V电源。
(2)红外遥控接收电路
作为电动执行机构,在工业过程控制应用时,常常会遇到安装位置不便于调试的情况。采用红外遥控调可以说是一个很好的解决方案,可以免去常规调试所需要做的一些工作,比如打开控制盒盖进行调试线路更改等等。红外遥控接收芯片采用红外遥控接收解码一体化集成芯片1838。电路如图6所示。
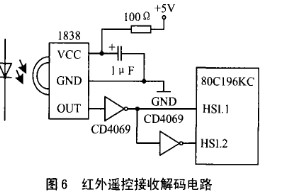
图6中,电阻和电容组成去耦电路,以抑制电源干扰;除此以外不需要任何外接元件,中心频率为38kHz。但是,由于1838集成芯片的增益高且不可调,没有屏蔽,特别容易受到外界的干扰,因此必须采取屏蔽措施。最好的办法就是利用金属材料做一个屏蔽盒,将1838装入,只留红外接口在外。
我们选用一种通用红外遥控器作为电动执行机构的调试装置。80C196KC单片机首先将遥控器各按键的命令码测出,然后对它们分别赋予我们所需要的调试命令,这样就可使开发周期大大缩短。
(3)上下位机通信
CAN(Cantrol Area Network)是控制局域网络的简称,最早由德国BOSCH公司推出,用于汽车内部测量与执行部件之间的数据通信。其总线规范已被ISO国际标准组织制定为国际标准,广泛应用在离散控制领域。其信号传输介质为双绞线。通信速率高达1Mbps/40m,直接传输距离最远可达10km/5kbps,挂接设备最多可达110个。
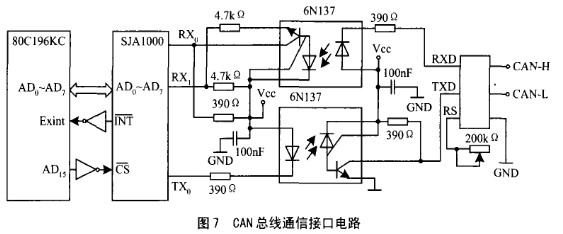
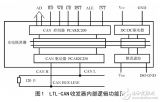
CAN的信号传输采用短帧结构,每一帧的有效字节数为8个,因而传输时间短,受干扰的概率低。当节点严重错误时,具有自动关闭的功能,以切断节点与总线的联系,使总线上的其它节点及其通信不受影响,具有较强的抗干扰能力。CAN总线通信接口电路如图7的示。
80C196KC的AD15端口作为SJA1000的片选信号,故CAN控制器SJA1000所占用的地址为:8000H~80FFH。使用CAN总线收发器PCA82C250目的是进一步提高CAN总线的驱动能力。它的工作模式由RS控制引脚来提供,取决于斜率电阻(200kΩ可调电阻的阻值)。
上位机通过一块华控的公司的HK-CAN30B PCI总线非智能隔离型通信板,可对工业现场具有CAN通信接口的仪表和控制设备进行监控。
(4)掉电保护和抗干扰措施
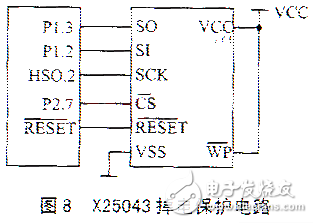
系统实现现电保护的元件采用Maxim公司的X25043。X25043有三种常用的功能:看门狗定时器、电压监控和E2PROM,组合在单个封装内。X25043对于要求电路板空间尽可能小的该系统来说是非常适用的,电路如图8所示。
X25043的看门狗定时器对微控制器80C196提供了独立的保护系统,可选超时周期有:1.4s、600ms、200ms,也可禁用。当系统故障时,在超出所选的超时周期以后,X25043看门狗将以RESET信号作出反应,使系统复位。利用X25043低VCC检测电路,可以保护系统使之免受低电压情况的影响。当VCC降到最小VCC检测电平时,RESET变为低电平,给系统复位,直到VCC上升到最小VCC检测电平200ms为止。此外,X25043还具有512×8位串行E2PROM,使得本系统无须另外扩展数据存储器RAM。
系统的抗干扰措施包括硬件措施和软件措施。硬件上:①在输入和输出通道采用光电隔离来进行信号传输,电机驱动电路上采用光电隔离器MOC3061,在上下位机通信电路上采用快速光隔6N137;②在每一个集成电路芯片都安置一个0.01μF的陶瓷电容,以消除大部分高频干扰;③模拟地与数字地分开;④在CPU抗干扰措施上,除了配置掉电保护电路外,还配置了人工复位和自动上电复位电路。软件上:①指令冗余,在一些双字节和三字节指令之后插入两条NOP指令,以保证跑飞的程序迅速纳入正确的控制轨道;②利用软件陷阱强行将捕获到的程序引向对程序出错处理的程序;③启用80C196KC内部监视定时器(watchdogtimer);④对A/D输入信号采取软件数字滤波。
3 系统的软件设计
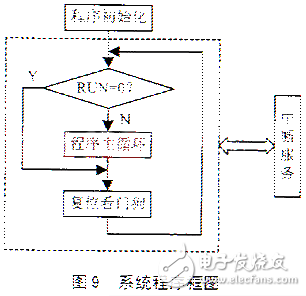
本系统程序框图如图9所示。首先,是程序的初始化,包括对硬件和变量的初始化。然后,程序判断全局变量RUN,若RUN=0,表示程序终止运行,则跳转到程序的末尾复位看门狗,随后再跳转到程序的前面,判断RUN标志,循环执行;若RUN≠0,则程序执行主循环,再复位看门狗。这样,通过设定RUN变量来控制程序的执行。
在中断程序程序中只处理基本的操作,如数据的输入和输出等;一些复杂的数据处理,如输入通道的软件滤波等等,都放在主循环里面处理。在主程序里,给每一个断分配一个全局变量作为中断标志,当有中断发生时,对此标志置1。在主循环里,程序依次判断每个标志位,来决定是否要执行相应的子程序,即过程或函数。在主程序中处理完相应的中断服务后,要对对应的中断标志清零。
主程序的功能包括:确定阀位和阀位状态、阀位和阀位状态的LED显示、阀位控制输出、判断阀是否堵转以保护电机避免电机过热、红外外遥控命令解码和遥控命令控制输出。在阀位控制输出上,采用以控制电机正反转的时间来控制阀位,将A/D采样的周期控制得非常短,如10ms,甚至更短。以这产的周期来控制电机的动作,在要求的阀位0.5%精度范围以内,保持电机不动作,以保证阀位控制的准确性以及避免阀位来回震动。
4 结论
通过对9610R系列全电子式电动执行器电机驱动电路和4~20mA恒流电路的改进,使执行器在模拟控制时的运行精确性和可靠性有了进一步的改善。提高了控制精度。它的智能化,使得远程维护成为可能;它的遥控系统的开发,使该电动执行器的调试更加方便。
-
单片机
+关注
关注
6039文章
44584浏览量
636686 -
CAN总线
+关注
关注
145文章
1953浏览量
130902 -
电机驱动
+关注
关注
60文章
1219浏览量
86833
发布评论请先 登录
相关推荐
80C196 单片机和CPLD在光电轴角编码器中的应用
基于80C196单片机的模糊控制系统
基于80C196单片机的角位移智能测量系统研究
基于PC机和80C196单片机的温度微机控制系统
80C196MC单片机实现多处理机互联技术应用
基于80C196的频率测量及在电压采样中的应用
基于80C196的频率测量及在电压采样中的应用
80C196MC单片机波形发生器原理及其在逆变电源中的应用
TMS320C31和80C196双CPU构成的高速实时控制系
串行AD转换器TLC2543与80C196的接口及编程






 工商网监
工商网监
评论