 用于GPS接收机中频率误锁检测和快速纠正的算法与仿真验证
用于GPS接收机中频率误锁检测和快速纠正的算法与仿真验证
为了解决全球定位系统(GPS)接收机中的锁频环在载波同步过程中可能出现的频率误锁问题,在分析了锁频环在噪声环境下的工作原理及产生频率误锁原因的基础上基于有无发生频率误锁时同一信息符号对应的多个预检测积分值的变化规律,提出了一种用于频率误锁检测和快速纠正的算法。仿真结果表明:该方法能够在锁频环完成工作之后及时判决是否有误锁发生,误锁时可在1~2个导航比特时间内把载波频率调整到正确频率上。该方法实现简单,可有效消除频率误锁给信号同步时间带来的影响。
载波的恢复与跟踪是对全球定位系统(GPS)C/A(coarse/acquisition)码信号进行相干解调的关键。通过捕获过程中伪码相位和载波频率的二维搜索,可获得载波频率的粗略估值,对载波相位的精确跟踪需采用锁相环实现。锁相环工作的频率动态范围很小,而捕获过程获得的载波频率估值仍存在较大的不确定度,故需先把载波频率牵引至锁相环的线性工作范围之内。一般可采用锁频环完成对载波频率的这一牵引过程。
接收机算法中,预检测积分时间的选择受到鉴频范围和信号信噪比的限制。GPS接收机中一般选用一个C/A码周期(1 ms)作为预检测积分时间,此时鉴频范围为250 Hz。为保证伪码捕获正常工作,预检测积分时间为1 ms时,捕获过程的最大频率间隔为667Hz;为尽可能快地捕获,捕获过程的频率间隔一般取得尽可能大,但不能超过鉴频范围,可取为500 Hz,此时捕获后的频率不确定度正好对应鉴频器的线性工作范围。若Doppler频偏落在线性鉴频区域的边界附近,受噪声的影响,跟踪频率可能越过线性鉴频区域,最终锁定在一个错误的频率上,造成误锁现象。如不能及时发现误锁,将会大大增加信号的同步时间。目前尚未在相关文献上见到如何解决这一误锁现象的方案。
本文分析了GPS接收机中锁频环的频率误锁现象,在此基础上提出了一种进行误锁判决,并在发生误锁的情况下把载波频率迅速调整到正确频率上的算法,最后通过仿真证明了本文的结论。
1 信号模型
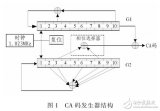
GPS的C/A码信号是二进制相移键控(BPSK)调制的直接序列扩频信号(DSSS)。对正交下变频得到的两路基带信号分别进行相关累积,得到预检测积分结果:
其中:tk=tk-1+T1,T1为预检测积分时间,选为一个C/A码周期;A为信号幅值;dk以为积分周期内信息比特的符号;△ω为接收信号载波与本地载波间的频率差,φ为接收信号载波与本地载波间的初始相差;ni(k)、nq(k)为噪声项。
鉴频器使用正交两支路相邻两时刻预检测积分值的叉积值估计频差,使用其点积值的正负消除信息比特符号翻转的影响。鉴频器输出如下:
图1为鉴频器鉴频特性曲线(其中ψ=△ωT1/π)。频差估值经环路滤波器反馈回本地载波NCO(number controloscillator),逐渐消除本地载波与接收信号载波间频差,完成频率牵引过程。
完成频率牵引之后鉴相器开始工作,鉴相器输出信号的表达式为
2 鉴频器环路频率误锁现象分析
不考虑噪声的情况下,参照鉴频特性曲线,分析鉴频器工作的原理及产生误锁现象的原因。
当O<|△ωT1|<π/2时,有正(负)的频偏,鉴频器输出也为正(负)值,通过负反馈调整本地频率,可使频偏减小,鉴频器输出将逐渐收敛到原点(0,0),即频偏为零的状态。
当π/2<|△ωT1|<π时,有正(负)的频偏,但鉴频器的输出为负(正)值,经过负反馈调整本地载波频率值,频偏反而会继续增大,鉴频器的输出将逐渐收敛到点(1,O)(-1,0)),之后鉴频器输出值为零,即频率锁定在使得△ωT1=π的状态点上,有一个固定的频率偏差△ω=π/T1,出现了误锁的情况。
有噪声情况下,考察(2)式中的点积项(IkIk-1+QkQk-1)。当频偏越接近线性鉴频区域边界时(|△ωT1|约等于π),余弦项的值越小,噪声项N2(k)对点积项的正负符号就具有越大的影响力。这样点积项的符号就不再能够正确反映dkdk-1的符号,估计的频偏值就可能与实际的频偏值正负相反,控制载波NCO向相反的方向调整,以至频率差值进一步增大。频偏值一旦超过线性鉴频范围,点积项符号与dkdk-1符号相反的概率也进一步增大,频偏不断向相反的方向调整,导致鉴频器逐渐收敛到误锁频率点上。
鉴相器并不能发现并纠正这一误锁现象。误锁时,本地载波与接收信号的载波间有一固定的频偏△ω0=π/T1及噪声造成的微小频偏△ω。此时鉴相器的输出为
频率偏差带来的相位项为π/2,而稳态相差为π/2,二者之和为0,Va(k)仍是接近于1的值,锁定判决器无法分辨出锁相环是锁定在误锁频率上还是锁定在正确频率上。
图2为误锁时鉴频器及锁相环的工作状态。

3 鉴频器误锁判决算法
考察式(1)中Ⅰ支路的预检测积分值。误锁情况下,本地载波与接收信号载波间存在固定频偏△ω=π/T1;同时本地载波与接收信号载波间还存在着固定相差φ=π/2。此时Ⅰ支路预检测积分值为
其中tk-1=(k一1)T1。可见,Ⅰ支路预检测积分值Ik的正负随着(一1)k-1dk的变化而变化。图3是发生误锁时的Ⅰ支路预检测积分输出以及正确跟踪到载波频率时的预检测积分输出对比图。
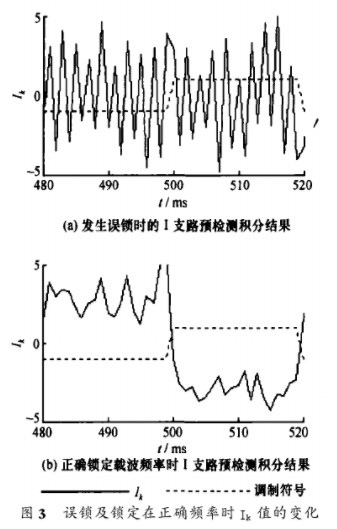
对于GPS卫星信号,一个调制符号周期内包含有20个C/A码周期。在预检测积分时间选为一个伪码周期的情况下,连续输出的20个预检测积分值均对应同一个调制符号。那么在没有发生误锁的情况下,连续输出的20个Ik值的正负均相同;而在误锁情况下,对应同一调制符号的20个Ik值的正负将随着(一1)k项交替变化,将会出现预检测积分值正负符号的连续翻转。据此可以得到锁频环误锁判决算法:
暂不考虑噪声的影响,锁定判决器指示锁相环已完成相位锁定之后,即开始累计连续20个Ik值的正负翻转次数,无误锁时应该是连续20个Ik值正负符号均相同,误锁时应该是Ik值正负符号交替变化,共发生19次翻转。
考虑噪声的影响,在进行BPSK解调时会有一定的解调误码,即Ik的正负符号会受噪声影响而出现错误,这将会影响到误锁时Ik正负翻转的次数。设解调符号Ik的误码率为Pe。如果设定20个Ik值中发生17次正负符号翻转即队为发生了误锁,那么,经分析可得到误锁检测概率为(n表示20个Ie值中正负符号翻转的次数)
也即漏报概率是Pe的二阶无穷小,可见阈值选为17即可获得相当好的检测性能。此时,在没有误锁的情况下,需要在20个Ik值中至少发生8个误码,才可能误判为发生了误锁,即虚警概率是Pe的8阶无穷小。
发现误锁之后,通常可以重新启动信号同步算法,再次经过鉴频器实现频率牵引,直
到正确跟踪到载波频率为止。但这样不仅比较耗时,而且还有再次发生误锁的可能。通过分析可以看出,在鉴频器发生误锁时,锁定的错误频率与真正要锁定的目标频率是有固定关系的:设伪码捕获之后的本地载波频率为f0,根据鉴频器的鉴频范匿,输入信号的载波频率fc
即可得到要锁定的信号载波频率fc,之后把频率牵引至正确的频率点fc上。
4 仿真结果
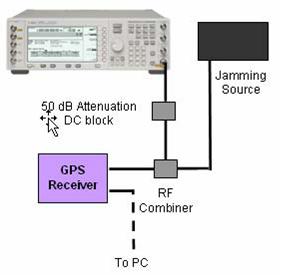
仿真条件:输入中频信号的载噪比为37dBHz;伪码捕获完成后本地载波频率为400 Hz,输入信号频率为650 Hz,频偏为一250 Hz;取预检测积分时间为1 ms,鉴频器鉴频范围为250 Hz。
图4为发生频率误锁时,使用上述算法判决出误锁状态,并把频率重新牵引至正确频率过程中鉴频器和PLL上的工作状况。

图4a为本地载波频率的跟踪过程,图4b为I支路输出的预检测积分值。最初频率向相反方向调整,锁定在了错误的频率上,I支路预检测积分值出现正负交替变化;发现误锁现象并做出正确调整后,本地载波重新锁定在正确频率上,I支路预检测积分值符号变化恢复正常(不再是相邻点正负交替变化)。仿真结果显示该算法能够有效工作,锁相环锁定之后只需要1~2个导航比特时间(20~40个C/A码周期)即可判断出有无发生误锁,且在极短时间内即可修正锁定的频率。
5 结 论
本文提出了一种检测GPS接收机中鉴频器是否发生频率误锁现象的方法,对鉴频器在频率牵引过程中出现频率误锁的原因进行了分析,并利用仿真验证了该算法的有效性。该算法对鉴频器发生的频率误锁现象有较高的检测概率,而且由于该算法在载波同步算法进入锁相环之后即可马上做出误锁判决,并且对误锁频率的修正几乎不需要花费时间,所以可以有效地降低误锁现象给载波同步时间带来的损失。该方法同样适用于具有类似GPS信号格式的其他全球卫星导航系统(GNSS)接收机。
-
gps
+关注
关注
22文章
2931浏览量
167660 -
接收机
+关注
关注
8文章
1197浏览量
53918 -
仿真
+关注
关注
50文章
4178浏览量
134717
发布评论请先 登录
相关推荐
基于MatLab/Simulink的GPS系统仿真
GPS接收机射频芯片
GPS接收机性能验证测试设计方案
GPS软件接收机信号的快速捕获与跟踪

基于FPGA的GPS软件接收机跟踪算法
基于FPGA-DSP平台实现GPS卫星导航接收机的设计






 工商网监
工商网监
评论