 直线一级倒立摆的组合式控制系统的设计与仿真
直线一级倒立摆的组合式控制系统的设计与仿真
引言
小车倒立摆控制能有效反映控制中的许多关键问题,如镇定问题、非线性问题、鲁棒性问题、随动问题及跟踪问题,因此成为学习自动控制理论,研究自动控制算法较为合适的实验对象之一。同时,它还具有工程应用背景,为理论到实践的转化提供了桥梁。因此,对倒立摆系统的研究在理论上和方法论上均具有深远意义。
本文针对本科自动控制原理课程设计中倒立摆摆杆偏角控制器的在线仿真存在:手扶摆杆起摆不安全,单变量摆杆角度控制器无法同时控制小车的位置,实验观测不便等问题,提出并设计了基于固高公司起摆控制、最优小车位置控制、嵌入学生摆杆偏角控制的组合式控制系统。在线仿真实验表明,组合式控制系统对直线一级倒立摆的控制有效,能满足本科自动控制原理课程没计及实验的安全、自动、直观、迅捷、可靠的要求。
1 系统建模
小车直线一级倒立摆系统的控制目标是摆杆偏角最大不超过±5°,小车在轨道中间位置左右偏移不超过±10 cm,以达到一种动态的平衡。

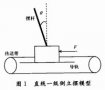
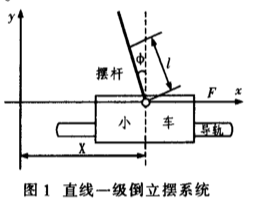
小车直线一级倒立摆实验系统如图1所示。对小车和摆杆做受力分析,根据牛顿运动定律,可得小车直线一级倒立摆动力学模型如式(1)所示。
式中:M为小车质量,m为摆杆质量;b为小车摩擦系数;l为摆杆长;I为摆杆转动惯量;θ为摆杆偏角;x为小车位移;F为小车受力。
由于θ=π+φ,且φ≤1(换算成弧度比较),u代表被控对象的输入力F,则对式(1)进行线性化处理,可得式(2),如下:
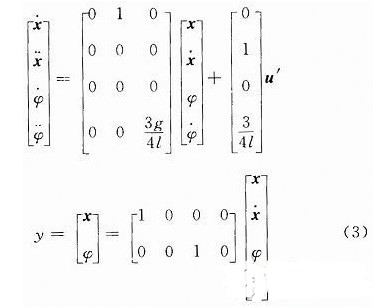
对质量均匀摆杆,取,由线性系统理论得系统的状态空间如式(3)所示:
2 嵌入式组合控制器的设计
2.1 系统能控性分析
被控系统状态完全可控性矩阵Uc=[B AB A2BA3B],通过计算可得rank(Uc)=4,即矩阵Uc的秩等于系统状态变量维数;被控系统输出完全可控性矩阵Uo=[CB CAB CA2B CA3B D],求得rank(Uo),即矩阵Uo的秩等于系统输出向量维数。所以系统可控,可以对系统进行控制器设计,使系统稳定。
本文所使用的控制器是由自动起摆控制器Swingup Controller、线性二次调节器LQR Controller和学生设计的控制器Controller1组成的嵌入式组合控制器。在Simulink中搭建直线一级倒立摆嵌入式组合控制系统,如图2所示。
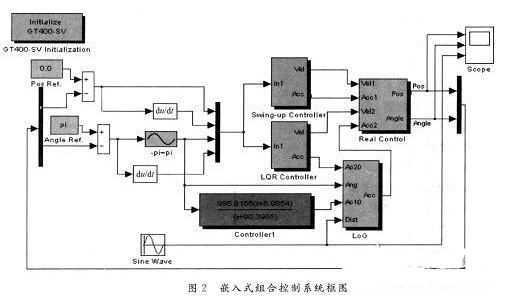
自动起摆控制器Swing-up Controller能够控制直线一级倒立摆由静止下垂的稳定平衡状态自动转化到竖直向上的不稳定平衡状态,而无需给摆杆施加力的作用,就可以实现摆杆的自动摆起。
2.2 LQR控制器原理
针对线性系统的状态方程和输出方程y(t)=Cx(t)+Du(t),LQR方法通过确定最佳控制量u(t)=-Kx(t)中的矩阵K,使得控制性能指标取极小值。其中,x是状态向量;u是控制向量;R为正定厄米特或实对称矩阵;Q为正定或半正定厄米特或实对称矩阵。参数R和Q分别用来平衡输入量和状态量的权重。
2.3 系统的结构
系统主要由被控对象、起摆控制器、LQR控制器、学生控制器、位置给定器、角度给定器、运算器和扰动信号发生器等构成。整个系统是在固高公司提供的直线单级倒立摆控制系统基础上,设计逻辑切换单元(LOG),把学生控制器嵌入系统中,形成嵌入式组合控制的倒立摆控制系统。
2.4 系统的功能
(1)能够实现摆杆的自动摆起。
(2)当摆杆偏角进入±20°范围时,自动切换到LQR控制器,以实现摆角的控制和稳摆;
(3)当摆杆偏角进入±5°范围时,自动切换到学生控制器稳摆。
在稳摆过程中,始终由LQR控制器控制小车在适宜位置运动。加入干扰信号后,可以同时在线观测到小车位置、摆杆角度被控过程和干扰信号的波形。整个运行过程无需人工干预,实现了安全、自动、迅捷、可靠的设计目标。多路显示器Scop可实时显示小车位置、摆杆角度、干扰信号的动态变化情况。
2.5 LOG模块内部结构
LOG模块内部结构如图3所示。
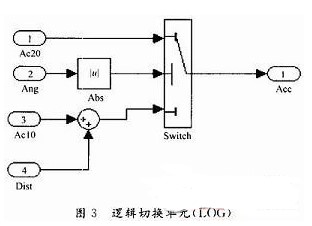
图3中左端端子分别为:端子1为摆杆偏角进入±20°范围时的加速度输入端;端子2为倒立摆摆杆的角度输入端;端子3为摆杆偏角进入±5°范围时的加速度输入端,端子4为干扰信号的输入端。中间的Abs和Switch框分别为取绝对值模块和选择开关模块。右端Acc为逻辑切换单元输出,即加速度信号。
2.6 逻辑切换单元原理
当摆杆偏角进入±20°范围时,自动切换到LQR控制器,以实现摆角的控制和稳摆;当摆杆偏角进入±5°范围时,自动切换到作者设计的控制器稳摆。
3 仿真实验
本文所用实际系统的模型参数为:l=0.25 m,g=9.8 m/s2,采样周期T=0.020s。
将上述参数代入第1节中系统状态空间方程式(3),可得系统的实际模型(4)如下:
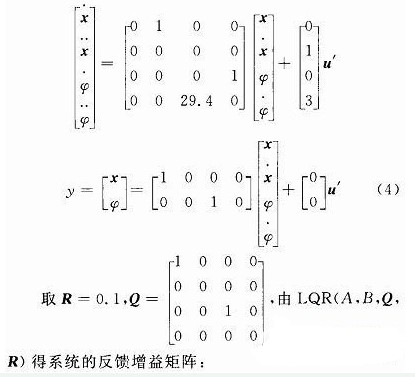
K=[-3.1623 -3.7134 31.1664 5.718 3]在线仿真的实时小车位置(单位:m)、摆杆角度(单位:(°))和干扰变化波形如图4所示。
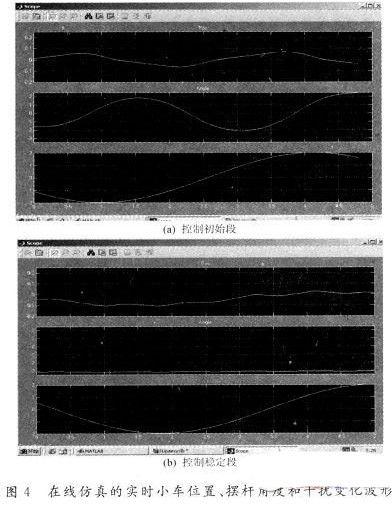
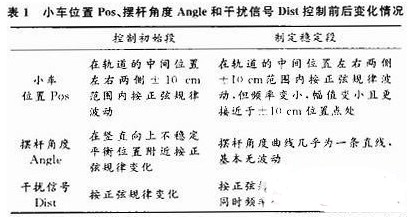
嵌入式组合式控制器控制过程中小车位置Pos、摆杆角度Angle和干扰信号Dist的在线仿真响应波形变化情况分析如表1所示。结果表明本文提出的嵌入式组合式控制算法对直线单级倒立摆系统的控制正确、有效。能够达到自动和安全的控制效果,满足系统的设计要求。
4 结论
本文根据线性系统理论、最优控制理论和自动控制原理没计了组合式控制器,其可行性和有效性在单级直线倒立摆系统上得到了验证。该控制器具有简单、直观和易于实现的特点。只要摆杆的初始角度在±20°范围内,嵌入式组合控制器都能使倒立摆控制系统保持稳定的倒立平衡状态。本文建立的实验平台也可作为控制系学生的《自动控制原理》课程设汁实验及考核平台。
-
控制器
+关注
关注
112文章
16185浏览量
177342 -
嵌入式
+关注
关注
5068文章
19008浏览量
303038 -
控制系统
+关注
关注
41文章
6538浏览量
110461
发布评论请先 登录
相关推荐
基于研华数据采集卡PCI—1710—B的倒立摆控制系统研究


模糊控制器控制一级倒立摆






 工商网监
工商网监
评论