 基于Microchip高效的变频洗碗机的设计方案
基于Microchip高效的变频洗碗机的设计方案
引言
目前洗碗机业已站在普及风口,有数据显示,欧美发达国家的洗碗机的普及率为60%~70%,中国市场普及率不足3%。再与国内较为普及的洗衣机相比,2017年洗衣机的产销量为4000万台,洗碗机为100万台左右。可见洗碗机的市场前景非常广阔。
近年来,随着国家节能减排,低噪环保等政策的实施,人们对产品性能要求的提高。定频技术向变频技术转变将成为未来的发展趋势。随着变频空调,变频风扇,变频洗衣机等变频家电在节能低噪性能上优势显著,人们对变频家电的接受度也逐步提高。变频洗碗机也应运而生。
贝能国际力推Microchip高效的变频电机解决方案——dsPIC33EP系列带DSP引擎的16-bitMCU。变频洗碗机应用是其中之一。
近年来,随着国家节能减排,低噪环保等政策的实施,人们对产品性能要求的提高。定频技术向变频技术转变将成为未来的发展趋势。随着变频空调,变频风扇,变频洗衣机等变频家电在节能低噪性能上优势显著,人们对变频家电的接受度也逐步提高。变频洗碗机也应运而生。贝能国际力推Microchip高效的变频电机解决方案——dsPIC33EP系列带DSP引擎的16-bitMCU。变频洗碗机应用是其中之一。
1Microchip变频洗碗机方案系统
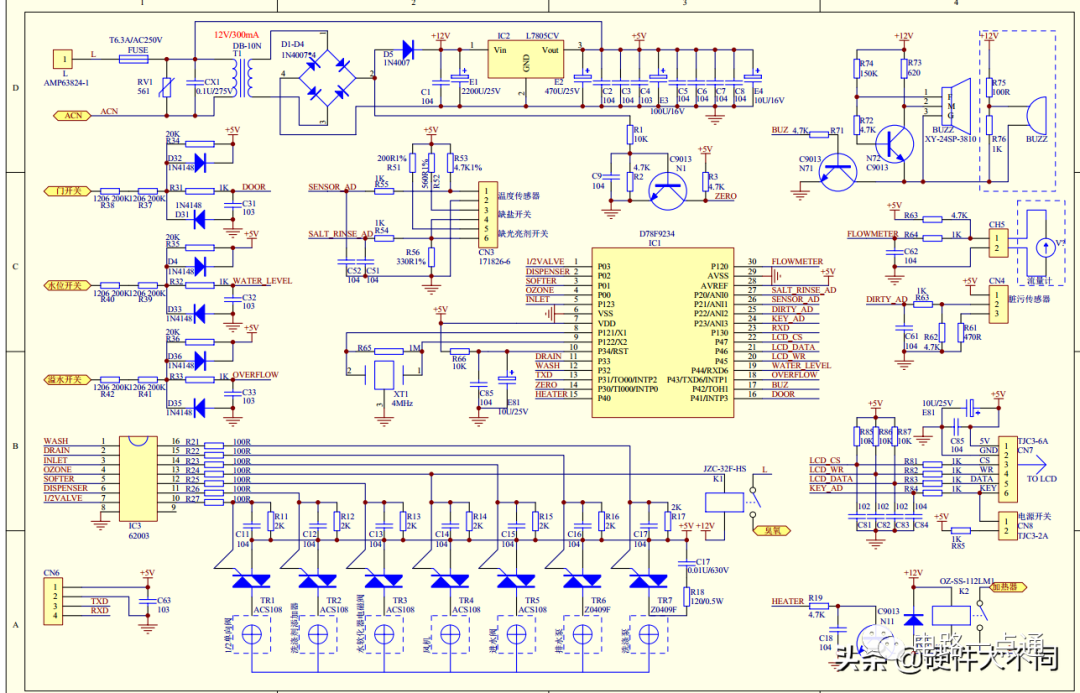
如图1所示,主控MCU用44管脚的dsPIC33EP64MC204,采用无传感器FOC控制技术对洗涤泵PMSM电机实现矢量控制和无极调速。同时对温度、浊度、水量等传感器进行实时监控,实现对进水量和洗涤水温精准控制,达到高效节能低噪性能。

2dsPIC33EP系列MCU功能特点
•工作条件:3.0V~3.6V,-40℃~+85℃,DC至70MIPS。
•内核。16位内核,高效代码型(C和汇编)架构;两个40位宽累加器;带双数据取操作的单周期(MAC/MPY);单周期混合符号乘法和硬件除法;32位乘法支持。
•功耗管理。有低功耗管理模式(休眠、空闲和打盹),具有0.6mA/MHZ动态电流(典型值);30uAIPD电流(典型值);高速PWM;最多具有3对使用独立时序的PWM;上升沿和下降沿死区;7.14nsPWM分频率;PWM支持,可用于直流/直流、交流/直流、逆变器、PFC和照明,或者BLDC、PMSM、ACIM和SRM;可编程故障输入;用于ADC转换的灵活触发配置。
•模拟特性。ADC模块方面,可配置为10位1.1Msps,4个S/H(采样/保持);或配置为12位500ksps,1个S/H(采样/保持)。具有灵活、独立的ADC触发源。最多具有3个直接连到ADC模块的运放/比较器。
•其他外设,有正交编码器接口、UART、SPI、ECAN、输入捕捉、输出比较和定时器,并有用户可选优先级仲裁功能的4通道DMA。
3dsPIC33EP32MC204在变频洗碗机电机控制应用
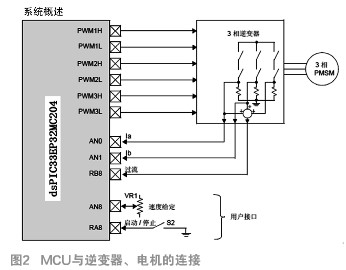
3.1系统概述
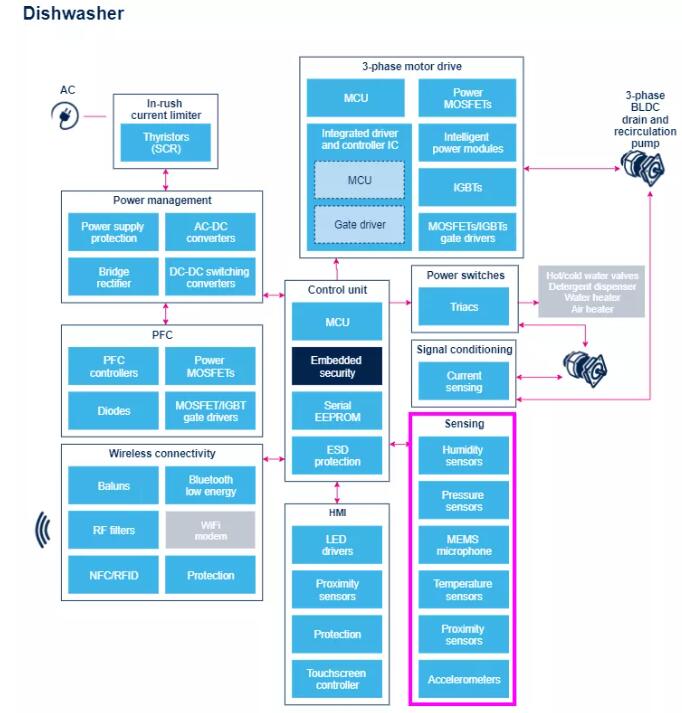
如图2所示,在电机轴上没有安装位置传感器,而使用低自感系数的分流电阻(3相逆变器的一部分)来测量电机上的电流。3相逆变器被用作功率级来驱动电机绕组。3相逆变器内置的电流检测和故障生成电路可防止整个系统受到过电流的损坏。图3列出了如何实现3相拓扑以及电流检测和故障生成电路。

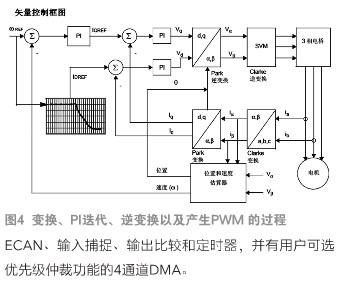
间接矢量控制的过程如下:
1.测量3相定子电流。。这些测量可得到Ia和Ib的值。可通过以下公式计算出Ic:Ia+Ib+Ic=0。2.将3相电流变换至3轴系统。该变换将得到变量Iα和Iβ,它们是由测得的Ia和Ib以及计算出的Ic值变换而来。从定子角度来看,Iα和Iβ是相互正交的时变电流值。
3.按照控制环上一次迭代计算出的变换角,来旋转2轴系统使之与转子磁通对齐。Iα和Iβ变量经过该变换可得到Id和Iq。Id和Iq为变换到旋转坐标系下的正交电流。在稳态条件下,Id和Iq是常量。
4.误差信号由Id、Iq的实际值和各自的参考值进行比较而获得。
•Id的参考值控制转子磁通;
•Iq的参考值控制电机的转矩输出;
•控制器的输出为Vd和Vq,即要施加到电机上的电压矢量
5.估算出新的变换角,其中Vα、Vβ、Iα和Iβ是输入参数。新的角度可告知FOC算法下一个电压矢量在何处。
6.通过使用新的角度,可将PI控制器的Vd和Vq输出值逆变到静止参考坐标系。该计算将产生下一个正交电压值Vα和Vβ。7.Vα和Vβ值经过逆变换得到3相值Va、Vb和Vc。该3相电压值可用来计算新的PWM占空比值,以生成所期望的电压矢量。图4显示了变换、PI迭代、逆变换以及产生PWM的整个过程。
3.3软件流程图
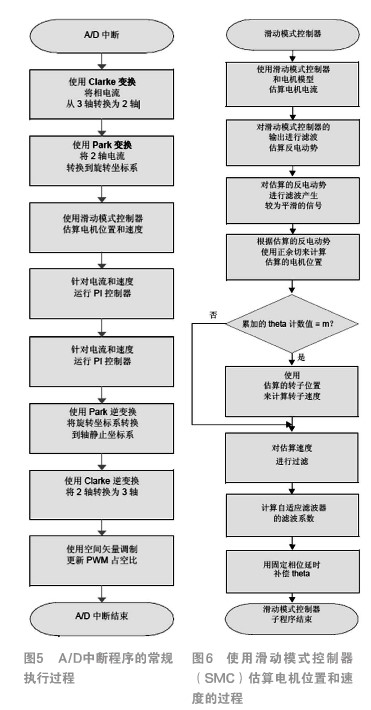
FOC算法以与PWM相同的速率执行。这样进行配置使得PWM可使用两个分流电阻器来同时触发两个绕组的A/D转换。允许A/D中断来执行FOC算法。图5显示了A/D中断程序的常规执行过程。图6给出了使用滑动模式控制器(SMC)估算电机位置和速度的过程。
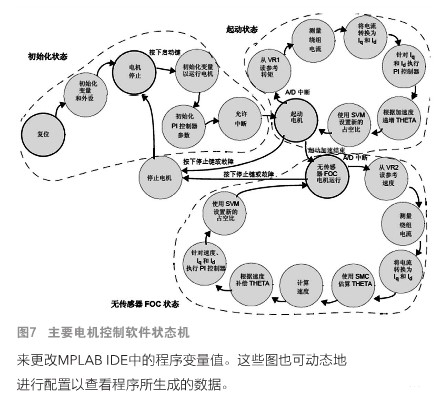
3.4主要电机控制软件状态机
如图7所示。首先,变频洗碗机系统上电,系统就将进入初始化状态,所有的变量都设置为其初始值,同时允许中断,使电机绕组断电。系统等待用户按下启动/停止按钮。然后执行起动程序,由此程序控制转矩电流分量(Iq)和磁通电流分量(Id),并以加速形式产生换相角度(theta),从而使电机转动。执行完启动程序之后,系统将切换到无传感器FOC控制,其中速度控制器被添加到执行线程中,随后滑动模式控制器(SMC)开始估算theta值,方法如图7所述。电机进入无传感器FOC控制状态后,根据用户或系统要求提供参考速度实时调整电机转速。实时监控停止按键和系统的任何故障,让电机能及时关闭,保护系统安全。状态图显示了软件的所有不同状态,以及使系统转换到不同状态的条件
3.5数据监视和控制界面
Microchip的MPLABIDE编译环境可提供一个调试工具——数据监视和控制界面(DMCI),可通过这一个界面对IDE项目中的范围值、开/关状态或离散值进行变量控制以对应用的运行加以限制。如果需要,应用反馈可以图形方式来表示,可直观观察电机控制的各种参数变量的变化,有效加快用户开发调试进程。该界面提供了可识别项目的程序符号(变量)导航,这些符号可被动态地分配给滑块控制、直接输入控制或布尔量控制的任意组合。随后这些控制可交互地用来更改MPLABIDE中的程序变量值。这些图也可动态地进行配置以查看程序所生成的数据。
5结论
基于MicrochipdsPIC33EP在变频洗碗机电机FOC控制的主要优点如下。
1.使用这种通用设计平台可获得较高的实用性(Microchip的FOC核心算法全部开源),从而更有效地生产电器产品。这意味着电器制造商现在可运用更经济的方法,通过无传感器FOC算法控制,生产出一系列使用PMSM或其他类型的电机的电器型号。
2.使用这些基于软件的电机控制设计,只需更改控制参数即可快速进行定制以满足不同市场的需求。适合电器产品平台化开发。
3.由于编程dsPIC33EP与编程MCU的方法相似,因此电器设计者可以快速设计出自己的电机控制算法并测试产品的原型。由于使用了功能强大的基于MPLABIDE的工具(例如DMCI),允许设计者方便地将其算法移植到各种电机平台上,其中包括PMSM、BLDC、BDC和ACIM,因而精细调谐电机控制变得非常便捷。
-
dsp
+关注
关注
554文章
8059浏览量
350070 -
mcu
+关注
关注
146文章
17316浏览量
352406 -
电机
+关注
关注
142文章
9081浏览量
146254
发布评论请先 登录
相关推荐
洗碗机电路原理图 低成本洗碗机电路设计方案
洗碗机拆解 米家智能独嵌两用洗碗机16套N1

霍尔元件 SS2309 在洗碗机中的应用案例
洗碗机好用吗?洗碗机的效果比手动洗碗更高效
怎样选购洗碗机
原装IC网UPD78F9234洗碗机解决方案
消费升级 助力洗碗机行业发展
洗碗机和消毒柜的区别浅析
洗碗机哪个牌子好?最新洗碗机十大排名让你放心选!
洗碗机历史悠久发展快速 创新走进中式厨房
如何选购一款好的洗碗机
洗碗机是一款比较复杂的家电产品,洗衣机方案浅析





 工商网监
工商网监
评论