 基于89C2051的步进电机驱动系统设计,Stepper motor drive system design based on 89c2051
基于89C2051的步进电机驱动系统设计,Stepper motor drive system design based on 89c2051
基于89C2051的步进电机驱动系统设计,Stepper motor drive system design based on 89c2051
关键字:可控电源,步进电机,89C2051
引言
步进电动机驱动方式主要分为恒压驱动、恒流驱动、细分驱动等,其中恒压驱动是成本最低、最简单的解决方案,但是它的显著缺点是:高频力矩下降较快,无法满足某些应用场合的要求。另外,目前市场上几乎所有的步进电机驱动器都存在着低频热耗散大的缺点。在成本压力较大、对功耗和高低频力矩都有较高要求的情况下,如何取舍是一件很难抉择的事情。
本设计通过一个低成本可控电源,针对控制频率的全程范围,相应输出若干段电压,低频低压、高频高压。同时,在同一频率下采用高低压驱动法,在电机启动时刻提供高电压,力矩保持阶段提供低电压,从而实现了低成本下的高频力矩提升、低频功耗下降的优良效果。
硬件设计
系统硬件电路主要由单片机电路、可控电源电路和步进电机驱动电路构成。单片机采用ATMEL公司的89C2051。实际应用中,用其P1口低4 位输出控制信号给可控电源电路,使可控电源输出不同梯次的驱动电压,当控制信号为“0000”时输出电压最低,控制信号为“1111”时输出电压最高,P1口高4 位用于输出相序控制信号给四相步进电机驱动电路,单片机根据控制策略决定驱动电压的高低和相序的变化。
可控电源
可控电源部分主要由LM2576-ADJ、缓冲器、电阻、二极管组成,电路如图1所示。图中LM2576-ADJ是一个降压型开关稳压源,其输出电压为:
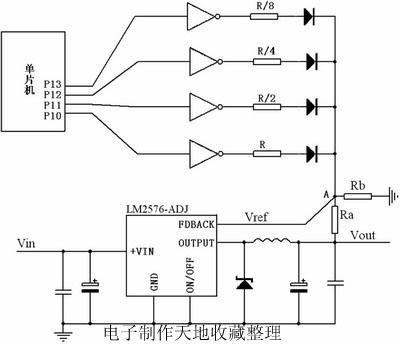
图1 可控电源电路
其中VH 为缓冲器输出的高电平电压,VD 为二极管结压降,VREF 为参考电压,Di 为单片机I/O口数字量输出。电路中采用缓冲器是为了提高高电平输出的稳定性和电流驱动能力,权电阻网络在单片机I/O口数字量控制下向VREF 节点提供电流从而改变输出电压Vout,二极管的作用是防止控制信号为低电平时产生反相电流。本设计采用4 位I/O控制信号,形成了4位8级可调电源。
四相步进电机驱动电路
图2所示为四相单极性步进电机驱动电路,主要由MOSFET、续流二极管、电阻组成。单片机I/O口输出信号MA、MB、MC、MD为高电平时,相应的开关管MOSFET导通,Vout向对应的电机绕组供电。电路中为了减小驱动元件的压降,采用了具有低导通电阻特性的MOSFET器件,利用二极管和电阻构成电机绕组的续流回路,避免了MOSFET器件在换相时由于瞬间电压过高而击穿。
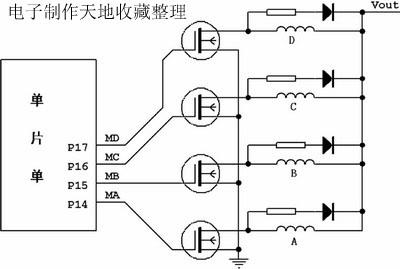
图2 四项步进电机驱动电路
控制方案及软件设计
为了实现高频力矩提升、低频功耗下降的目的,设计中采用了高低压驱动和驱动电压根据频率分段而调整相结合的控制策略。
发布评论请先 登录
相关推荐
89C52单片机控制直流24V电机输出,数码管显示乱码?
步进电机如何自适应控制?步进电机如何细分驱动控制?
步进电机主要有哪些分类?步进电机的主要构造是什么?
探索步进电机驱动IC的创新融合







 工商网监
工商网监
评论