 汽车倒车防撞告警器,Auto Reversing alarm
汽车倒车防撞告警器,Auto Reversing alarm
汽车倒车防撞告警器,Auto Reversing alarm
关键字:汽车倒车防撞告警器
汽车倒车防撞告警器
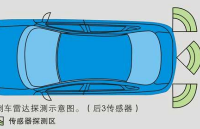
如图所示,汽车倒车防撞告警器包括超声脉冲发射电路和超声接收电路,探测距离为5米。
IC2采用四2输入端或非门CD4001,其中IC2c,IC2d组成低频脉冲发生器,IC2a、IC2d组成双稳态电路。IC2a的输出加至ICl(555)的复位端④脚,即在稳态低电平期间使555处于强制复位状态。ICl与R1、RP1、C1组成无稳态多谐振荡器,在IC2a高电平输出时起振,振荡频率f=1.44/(R1+RP1)C1,图示参数对应的频率为25kHz~150kHz,调节RP1,使其振荡在40kHz。IC1的输出加至计数电路IC3的CP端(14)脚,IC3采用十进制计数器/脉冲分配器,它的Q7⑥脚连到复位端R(15)脚,形成环形计数电路,在计数电路的Q7输出至双稳电路IC2a时,计数电路消零。也就是说由于环形计数电路对双稳态电路的控制,每发7个周期数目的一组脉冲后,Q7输出的窄脉冲(高电平)便使双稳态IC2a复位,输出的低电平脉冲便强制555复位,中止振荡,实现对40kHz的脉冲调制。ICl发出的40kHz的调制脉冲通过T40-16超声发射头向前方辐射。
接收器由超声接收头、放大器、触发器、计数电路和控制电路组成。超声头采用与发射头配对的R40-16,在收到前方目标反射回的超声信号,经声—电变换、放大后,加至由运算放大器构成的比较电路IC4的③脚。计数电路IC5(CD4014)与IC3作用相同,每接收到一组脉冲后,⑥脚(Q7)便输出一个窄脉冲。IC7a、IC7b(CD4001)为双稳态电路。IC7a输出的正脉冲经平滑滤波后加至运算放大器IC5。当倒车遇到阻碍物体时,反射回的调制脉冲波,经解调后控制继电器吸合,同时发出告警声。
本电路中的超声发射,接收头对于电路正常工作至为重要,振荡超声频率的调节应在T/R40-16的40+lkHz范围之内,40kHz的最低灵敏度为-64dB。两传感头平行安装,间距应在40mm左右。为了对车后不同方位的障碍物都能可靠的探知,本文所述的发射和探测头应安装两对以上。以使倒车防撞更加可靠。
---------拉动滚动条查看完整电路-------
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
发布评论请先 登录
相关推荐
dac3171 config5的alarm_dataclk_ gone有告警是什么原因?
使用的是DAC 31717bit模式。FPGA有数据输出,也有随路时钟216M。但3171的config5 的alarm_dataclk_ gone有告警。用示波器测试有时钟216M输入到DAC里面,DAC无输出,请问还需要配置其它寄存
发表于 12-20 07:02
请问ADS8661寄存器如何配置可使alarm输出报警?
我们现在使用ADS8661数模转换器,采样数据读取正常,我们打算使用ads8661的input alarm功能在电压超门限的时候产生报警信号,我配置了下面的寄存器:
1.地址14寄存器
发表于 11-27 07:40

安泰功率放大器在倒车雷达传感器测试中的应用介绍
倒车雷达传感器是现代汽车安全系统中的重要组成部分,它可以帮助驾驶员在倒车时检测障碍物,并提供警告,从而减少事故的发生。在倒车雷达传感

请问如何定位SMU中alarm的报警源?
对于开发人员来说,SMU 检测到 Alarm 后,如何发现和定位导致 alarm 的原因和位置才是最具有挑战性的。以看门狗超时为例,在出现看门狗复位后,我有以下问题希望得到解答: 1.
1.通过那些
发表于 08-01 06:18
蓝牙连接失败,打印alarm_set failed to start timer, err 0x103如何解决?
蓝牙偶尔连接失败,似乎是启动alarm定时器的问题,打印信息如下:alarm_set failed to start timer, err 0x103
请问如何解决?谢谢!
发表于 06-25 08:22
esp32硬件定时器计数器设置向下计数会无限重启的原因?
,
.counter_dir = TIMER_COUNT_DOWN,
.counter_en = TIMER_PAUSE,
.alarm_en = TIMER_ALARM_EN,
.auto
发表于 06-13 08:02
基于51单片机的车辆倒车雷达报警系统,HC-SR04超声波测距,全套资料
;
系统概述
本课题以AT89C51单片机为核心设计一种超声波倒车雷达系统,同时兼顾车内温度测量。
系统由AT89C51控制器、HC-SR04超声波模块、DS18B20温度测量模块、声音报警电路
发表于 03-19 14:17
美芯晟携最新汽车芯片亮相印度AUTO EXPO展会
近日,备受瞩目的印度AUTO EXPO在浦那市盛大开幕,聚焦汽车电子领域的创新技术和产品。作为高性能模拟及数模混合芯片设计的领军企业,美芯晟科技(北京)股份有限公司(简称:美芯晟,股票代码:688458)亮相此次盛会,展示了其最新的汽车
AWTK 开源串口屏开发(10) - 告警信息的高级用法
告警信息是串口屏常用的功能,之前我们介绍了告警信息的基本用法,实现了告警信息的显示和管理。本文介绍一下实现查询告警信息和查看告警信息详情的方

TC277 watchdog超时后无法触发SMU Alarm怎么解决?
不了watchdog timeout alarm,如果在不解锁的情况下,强制修改SCU_WDTSCON0寄存器的 lck位,ALM3[17]可以报出Alarm
watchdog配置寄存器
发表于 01-30 07:06





 工商网监
工商网监
评论