 通过设置合理的延迟时间实现电机的准确换相
通过设置合理的延迟时间实现电机的准确换相
无刷直流电机(BLDCM )具有结构简单、运行效率高和调速性能好等优点,在工业和商业领域得到广泛应用。 近年来, 无刷直流电机的无位置传感器控制一直是国内外的研究热点,较为常见的转子位置信号检测方法有反电动势法、定子电感法、续流二极管法、磁链估计法和状态观测器法等,其中反电动势法最为有效实用。
速时, 分别在PWM 关断和开通阶段检测反电动势,采用2个不同的参考电压获得反电动势过零点,而不需位置传感器和电流传感器,但增加了硬件电路的复杂性。 文献通过比较悬空相绕组端电压和逆变器直流环中点电压的关系,获得反电动势过零点。 该方法无需重构电机中性点, 不使用滤波电路,但需采用硬件电路比较得到过零点。
提出了在on _pwm 调制方式时的反电动势过零点检测方法,采用内置AD 的微控制器在PWM开通时检测悬空相端电压,软件算法中使用简单的代数运算,获得准确的过零点信号。 目前,关于反电动势法的研究多集中在反电动势过零点的检测电路方法和由滤液电路引起的相位误差的消除或补偿方法,但在准确换相方面的研究尚不够深入。
1、直接反电动势法原理
无刷直流电机一般采用“两相导通三相六状态”运行方式, 每个工作状态只有两相绕组导通,第三相绕组处于悬空状态,被用来检测反电势过零点。 在检测到反电动势过零点后, 根据换相点滞后过零点30°电角度, 设置对应的延迟时间。 当延迟时间到达后,电机换相进入下一个工作状态。
本文采用基于端电压的直接反电动势检测电路,通过检测悬空相绕组的端电压信号来获得反电动势过零点。 采用分压电阻对端电压和直流侧电压进行同比例分压,使分压后的被测信号落在采样单元允许的输入范围内。 图1 ( a)为主电路和直接反电势法分压电路,端电压UA , UB , UC 和UDC经过分压后分别为Ua , Ub , Uc 和Udc.
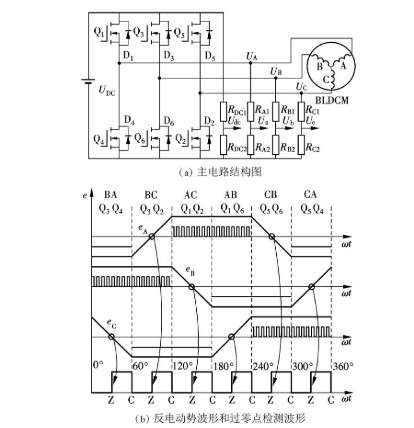
理想的反电动势波形为正负交变的梯形波,且以电机中心点为参考点,图1 ( b)中, eA , eB , eC 分别表示三相反电动势。 电机在一个周期内共有6个工作状态,每隔60°电角度工作状态改变一次, 每个功率开关导通120°电角度。 工作状态可以由导通的两相绕组和2个功率开关表示,如图1 ( b)所示,BA 表示电流从B 相绕组流入,从A 相绕组流出;Q3Q4 表示B 相上桥臂和A 相下桥臂的2个功率开关导通。 过零点检测波形表示反电动势过零点和换相点, 其中, Z为反电动势过零点, C 为换相点。反电势过零点和换相点均匀分布,彼此间隔30°电角度。
2、反电动势过零点检测方法
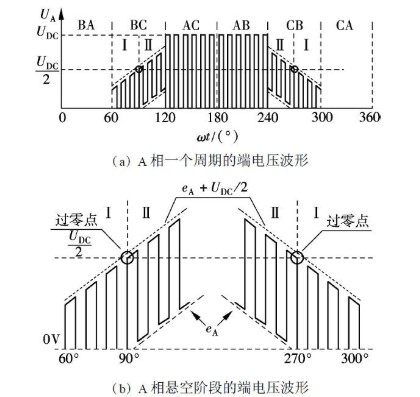
无刷直流电机控制可以采用多种PWM 调制方式。 采用的调制方式不同, 呈现的端电压波形也不同。 本文采用上桥臂PWM 调制,下桥臂恒通(H _pwm 2L _on )的调制方式。 以A 相为例, 假设PWM 占空比为50% ,忽略高频开关噪声和换相续流产生的脉冲毛刺,理想的端电压波形如图2 ( a)所示。 在一个周期范围内,将A 相端电压波形划分为BA, BC, AC, AB, CB 和CA 六个区域,每个区域对应一个工作状态。 端电压波形的上升部分和下降部分为BC区和CB 区,此时A 相处于悬空状态。
BA 和CA 区为A 相下桥臂开关导通阶段, Q4处于恒通状态, A 相绕组与直流侧电压的负极相连,端电压被钳制到直流侧电压的负极电位。 由于直流侧电压的负极为端电压的参考点,此时端电压为零。
AC 和AB 区为A 相上桥臂开关PWM 调制阶段。 以AC区为例,在PWM 开通期间, Q1 和Q2 导通, A 相绕组与直流侧电压的正极相连, 端电压为UDC ;在PWM 关闭期间, Q1 关闭, Q2 导通,由于绕组阻抗呈感性, A 相下桥臂的反并联二极管D4 导通续流,此时A 相绕组与直流侧电压的负极相连,端电压为零。
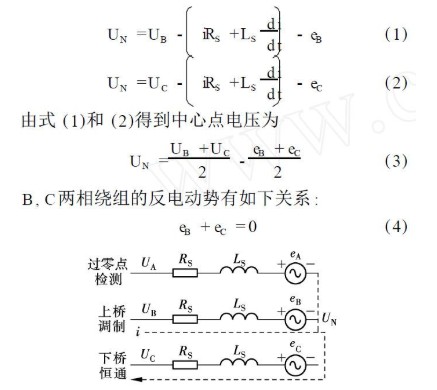
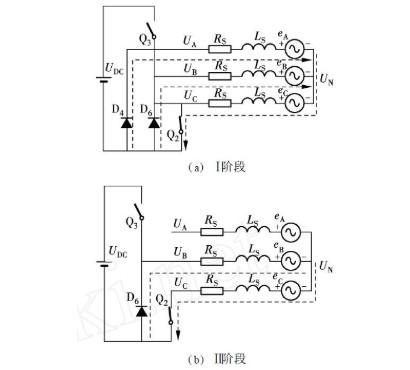
BC和CB 区为A 相悬空阶段,将2个区域各自分为Ⅰ和Ⅱ两个时段,如图2 ( b)所示。 以BC 区为例,此时电流从B 相绕组流进, C 相绕组流出,如图3所示。 图中, RS 和LS 分别表示定子绕组的等效电阻和电感, UN 为电机中心点电压, i为相电流。 忽略功率开关和二极管的正向导通压降, 根据基尔霍夫电压定律可得
本文在PWM 调制开通状态结束时刻对悬空相的端电压进行采样。 由于硬件电路存在延时效应,采样时功率开关尚未关断, 相当于在PWM 调制开通期间采样,此时被采样的电压信号受开关噪声影响较小。 根据式( 5) , 当检测到A 相端电压值为直流电压值的一半时, A 相反电动势过零, UA 和UDC /2的比较就相当于eA 和0的比较。
反电动势过零点检测方法简单准确,使用软件算法判断反电势过零点。 硬件电路只要选择阻值和功率都合适的电阻用于分压,不需要重构电机中心点,也不需要低通滤波器,信号没有相位延时,也不采用比较器来检测过零点。 硬件电路结构简单, 适合低成本应用。
3、延迟时间设置方法
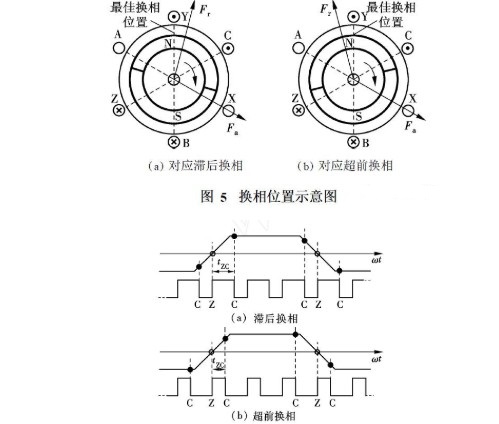
最佳换相逻辑是指绕组在梯形波反电势的平顶部分导通, 与之对应的最佳换相位置是指在换相完成后,定子磁势超前转子磁势120°电角度,如图5所示。 其中, Fa 和Fr 分别表示定子磁势和转子磁势。 在一个工作状态内定子磁势平均超前转子磁势90°电角度,平均电磁转矩最大。
若在换相时刻转子已经转过最佳换相位置,则表现为滞后换相,换相点在时间轴上相对最佳换相位置右移,端电压波形不对称, 右侧的部分波形被湮没,过零点到换相点的延迟时间tZC偏大,如图6所示。 滞后换相时, 转子超过最佳换相位置的角度应小于30°电角度, 若换相严重滞后, 下次过零点将被湮没而检测不到,引起电机失步。 反之,若转子还没有到达最佳换相位置就换相,则为超前换相,换相点在时间轴上相对最佳换相位置左移,端电压的部分左侧波形被湮没,过零点到换相点的延迟时间tZC偏小。 滞后换相和超前换相都会引起电机电磁转矩波动,转子运转不平稳。 实测的端电压波形(通道1)如图7所示,通道2为过零点检测波形,上升沿与下降沿分别对应过零点与换相点。
根据过零点超前换相点30°电角度的原理,在检测到过零点后,设置延迟时间tZC确定换相点。 理想运行状态下,过零点与换相点等间隔分布,彼此相差30°电角度。 因此, 可根据过零点的间隔时间来设置延迟时间,传统的延迟时间设置方法是将延迟时间设置为上次过零点到本次过零点时间的一半,如图8所示。 图中, Z ( k) , C ( k)分别表示第k次过零点和第k次换相点,当检测到第k次过零点时,延迟时间如下设置:

式中, TZZ ( k - 1)为第k - 1次过零点到第k次过零点的时间; tZC ( k)为第k次过零点到第k次换相点的延迟时间。
将设置好的延迟时间载入寄存器,计数器开始计时。 到达预设的延迟时间后,电机换相进入下一个工作状态,定子磁势步进一次。 换相点位于相邻过零点的中间位置,电机在最佳换相位置换相,平均电磁转矩最大,端电压波形呈对称状态。 当反电动势过零点分布均匀时,传统的延迟时间设置方法能较好地实现无刷直流电机的无位置传感器控制。
4、新的延迟时间设置方法
反电动势法重在检测反电动势波形上升和下降部分的2个过零点,波形平顶部分对过零点检测方法影响不大。 由于电机制造工艺等方面的影响,实际的无刷直流电机存在三相绕组并不完全对称的情况,导致三相反电动势之间存在差异, 相邻过零点的间隔时间不完全相等, 过零点分布并不均匀。、
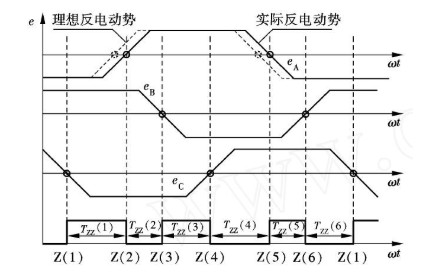
假设A 相反电动势存在相位偏移, 波形上升和下降部分上的过零点滞后出现,导致过零点在时间轴上分布不均匀。 如图9所示, 虚线表示理想反电动势,实线表示存在相位偏移的实际反电动势,过零点的间隔时间TZZ (1) , TZZ ( 2)和TZZ ( 3)不相等。 每相反电动势波形上升和下降部分的2个过零点相差180°电角度, 过零点间隔时间存在着周期性规律,如TZZ ( 1) =TZZ ( 4) , TZZ ( 2) = TZZ ( 5)和TZZ (3) = TZZ (6) 。
采用传统的延迟时间设置方法,某些换相点偏离理想换相点较大。 当某次换相严重滞后时,下次过零点容易被湮没,导致电机失步,如图10所示。
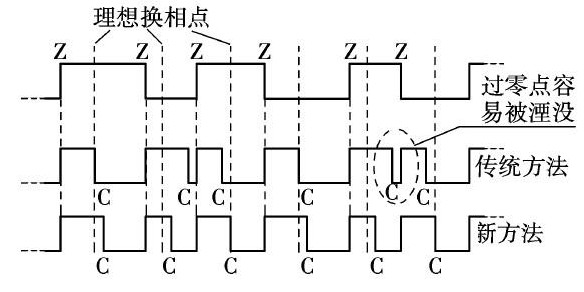
为使换相点位于相邻2个过零点的中间位置,本文提出一种新的延迟时间设置方法。 如图11所示,过零点的间隔时间TZZ ( k - 3)和TZZ ( k)相等,当检测到第k次过零点时,从第k次过零点到第k次换相点的延迟时间tZC ( k)如下设置:
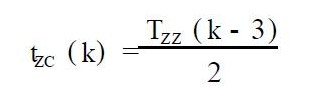
式中, TZZ ( k - 3)为第k - 3次过零点到第k - 2次过零点的时间。
当三相反电动势波形的间隔时间长度不是理图11新的延迟时间设置方法想的120°电角度,过零点间隔时间不相等时,采用新的延迟时间设置方法可以使换相更为准确,换相点落在前后2个过零点的中间位置,过零点不容易被湮没,电机运行不易失步,如图10所示。 特别是在电机高速运行时,新方法提高了电机运行的可靠性,实验很好地验证了新方法的可行性和有效性。
2种延迟时间设置方法对应的实测端电压波形(通道1)如图12所示,通道2和通道3为过零点检测波形,通道2的上升沿和下降沿对应于过零点,而通道3的上升沿和下降沿分别对应过零点和换相点。
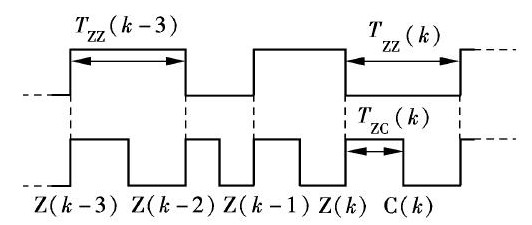
图13为实测的三相端电压波形(通道1~通道3) ,通道4的上升沿和下降沿分别对应过零点和换相点。
5、结论
1) 反电动势法通过检测端电压获得反电动势过零点,设置延迟时间得到换相点。 本文采用软件算法获得过零点和换相点, 简化了硬件电路, 适用于低成本应用。
2) 超前换相或滞后换相都会导致电机运行不平稳,端电压两侧波形不对称, 通过设置合理的延迟时间,可使电机在最佳换相位置换相。
3) 当反电动势过零点分布均匀时, 可采用传统的延迟时间设置方法,即将延迟时间设置为上次过零点到本次过零点时间的一半。
4) 当实际电机的反电动势过零点分布不均匀,可使第k次过零点到第k次换相点的延迟时间等于第k - 3次过零点到第k - 2次过零点时间的一半,这一新的延迟时间设置方法,使换相点位于相邻2个过零点的中间位置,实现了电机的准确换相。 实验很好地验证了该新方法的可行性和有效性.
-
传感器
+关注
关注
2551文章
51097浏览量
753507 -
电机
+关注
关注
142文章
9020浏览量
145476 -
电动势
+关注
关注
6文章
244浏览量
16334
发布评论请先 登录
相关推荐
PCM1808从模拟信号输入到I2S信号输出的延迟时间是多少?怎样计算出来?
六步换相法pwm控制bldc电机,电机超过额定电压控制的原因?
直流无刷电机通过反电动势获取换相表方法


换相器的工作原理和应用领域
三相电机任意换根线就反转吗
CS32F03X生成多路PWM控制无刷电机换相
请问PSoC4系列的输入输出延迟时间是多少?
步进电机正反转的换线方法






 工商网监
工商网监
评论