 声控玩具车电路图
声控玩具车电路图
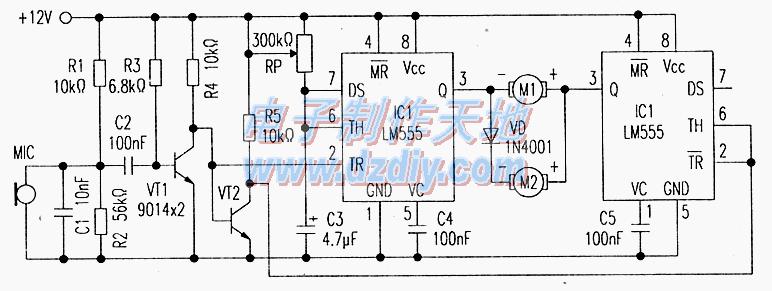
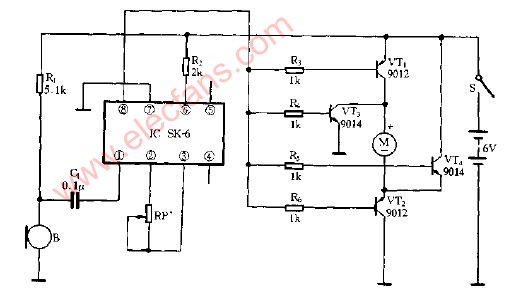
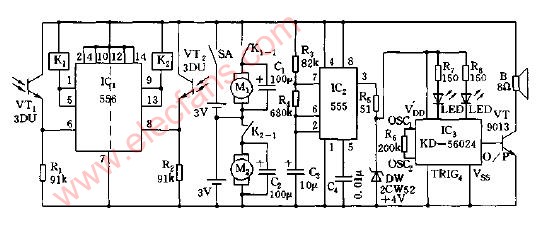
原理电路如附图所示,驻极体话筒MIC将拾取的声音信号转换成电信号,然后由VT1放大和VT2反相.分别控制IC1、IC2驱动进退电机M1和转弯电机M2(或转弯电磁铁)工作。R1、R2是MIC的偏置电阻.可改变接收灵敏度,即声控距离的远近。高频旁路电容C1和耦合电容C2.能在一定范围内选择声控指令(如哨音、击掌等)的频率,减少杂音干扰.增加声控可靠性。Ic1、Ic2使用双极型单时基电路LM555(或一片双时基LM556),其最大驱动电流可达200mA以上。IC1接成单稳态模式,暂态时间一般按t=1·1RP·e3进行仿算。IC2接成触发器模式,M1、M2接在IC1、IC2的输出端之间。
当MIC没有收到有效的声控信号时,VT1截止,VT2导通,IC2因②脚为高电平,使③脚为低电平,Ic2因②、⑥脚为低电平,使③脚输出高电平,M1获正电流正转,玩具车前行.此时因VD反偏截止,所以转弯电机M2无电流而不工作;当MIC收到一定频率和声强的指令信号时.VT1导通,VT2截止。Ic1②脚为低电平.使其③脚为高电平,IC2因②、⑥脚为高电平使其③脚为低电平.M1获负电流反转,玩具车后退,与此同时.VD导通,M2获负电流(正电流亦可)使玩具车转弯。暂态时间t后,Ic1③脚翻转向低电平,M1获正电流使玩具车按转弯后的方向继续前行,同时因VD截止M2失去电流而停止转弯。
需要说明的是,如果IC1暂态时间较长(由RP调定),在Ic1③脚仍输出高电平时,因声控信号消失使VT1截止,VT2导通,IC2③脚输出高电平.则M1、M2两端均为高电平.故两电机都停止工作,玩具车会停顿一下(几百毫秒至1秒),待暂态时间结束,Ic1③脚翻转回低电平后,M1会正转,玩具车继续前行。此瞬间停顿,不会影响玩具车运行。调RP,可消除上述停顿现象。
-
话筒
+关注
关注
1文章
70浏览量
33885 -
555
+关注
关注
24文章
429浏览量
108558 -
单稳态
+关注
关注
0文章
35浏览量
20847
发布评论请先 登录
相关推荐

声控玩具车相关资料分享
遥控玩具车电路图







 工商网监
工商网监
评论