 超声波电子导盲电路的工作原理
超声波电子导盲电路的工作原理
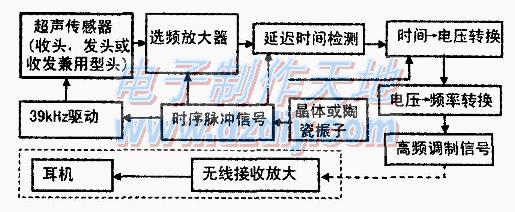
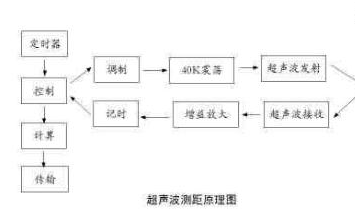
本设计是在盲人或弱视者双脚的鞋底上安装电子装置,用超声传感器精确测量鞋底前掌中心与地面的距离,将距离转换为时间,再将时间转换为电压,由压控振荡器产生声频振荡,其频率与距离相关。再经过无线传到盲人头部的接收电子装置,驱动耳机,双鞋的共用一个信道,因为走路两脚不能同时离地,左/右只有一路工作.当抬起一只脚时,鞋底上的传感器检测到大于10厘米就有声频产生,距离越大,声调(频率)越高,平地走路声调高低变化平缓。下楼梯时,脚抬起一前迈——下落,能正常听到声调高低较大的变化.遇到深坑大于30cm声调会很尖,起提示作用。其原理框图如下图所示。
1.时序信号的产生
因为用电池供电,电压随着使用时间会逐步下降。
用通常的RC振荡器频率不稳定。用通常收音机的465kHz的陶瓷振子产生振荡,再经过12分频,得到39kHz信号,再经过一系列的分频可以得到所需得各种时序脉冲信号。4069内部只有一级CMOS反相器,一般称非缓冲门,用“UB”表示,适合做32KHz到465kHz的晶体振荡器,下图中R2的负反馈使UID工作在线性放大区,约为1/2电源电压。UID第9脚有一个微弱的变化经过UID,UIE两级反相,得到同相位的放大r的信号,经过X2三端陶瓷滤波器,只有465kHz的信号能通过,正反馈到UID第9脚。形成连续的振荡。这时如果取走R2照旧有振荡。没有R2,刚接通电源时UID第9脚可能只有零点几伏,第8脚输出高,UIE第11脚低。
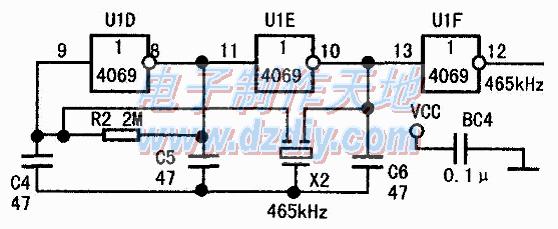
处于开关状态,不能对小信号放大。不起振。偶尔触一下第9脚可能开始工作,但不一定稳定。可见R2的作用把UID第9脚电平拉到线性区。如果把74HC04代替4069,因为74HC04内部每个门有三级反相门,接上R2后已经形成奇数级环形振荡器的结构,即使没有X2已经有若干兆赫兹的振荡。接上X2也难达到目的。C4,C5,C6是匹配电容。还可以微调频率。接上后实际频率为470kHz。
U2是D触发器,时钟从低到高时Q的状态等于D。如果把Q和D连接起来,就成为二分频器,时钟每来一次翻转一次。开始,Q=0O,Q=1,D=Q就等于1,时钟来一次,Q变成1,Q=0,D=Q就等于0,为下一次时钟来Q变成0做好准备。时钟变二次,Q变一次,就是二分频器。把两级D触发器串联起来,就成为四分频器。现在要三分频,就要加一定的反馈。简单的方法如下图所示。U2A是二分频器,其输出,Q1送U2B的时钟,Q1变O,Q1变1,Q2就翻转。没有反馈时Q2Q1的状态是00,01,10,11。等到11状态立即清0,与非门U3D两个输入端都为1,输出0,U3C输出1,D触发器清0。
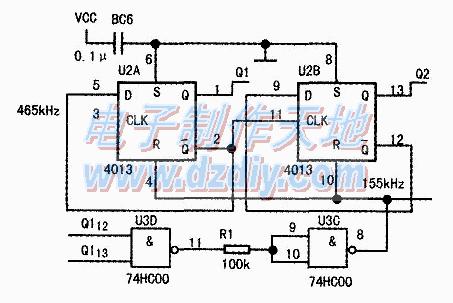
R1的作用是延迟,加宽清0脉冲到300ns,1/3信号可以从U3C输出,也可以用Q2,不能用Q1。
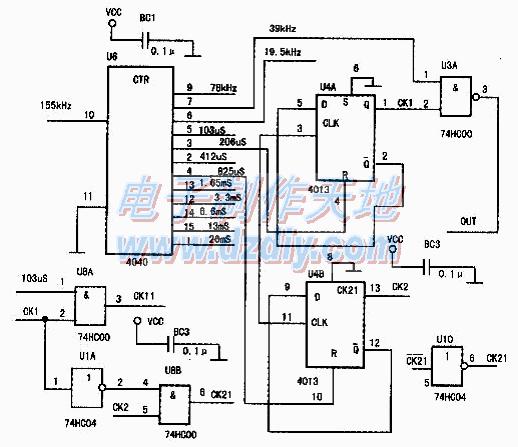
155kHz信号送到12级二进制异步计数器4040的U6的第10脚时钟端。异步计数器相当于12个接成二分频的D触发器串起来,上一级从1向0变化时下一级才能翻转,每级有5差不多500ns的传输延迟,而且逐级累积。下图是各级波形图,显然,周期为206us的信号先从1变0,3.3ms周期的信号延迟约3μs从0变l,触发U4A、U4B翻转输出为1。
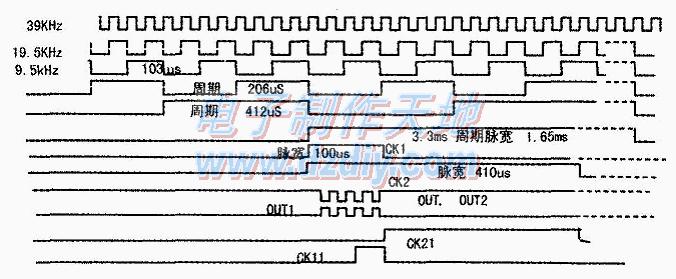
在周期为206μs的信号的负脉冲期间,时间等于103μs-3μs,U4A输出CK1维持1,在206μs的信号的正脉冲期间,信号接U4A的第4脚R端,CK1清0,这种状态一直要等待3.3ms,周期性的触发信号再次来到,才重复出现一次。CK1的脉宽100μs,周期3.3ms。
同样,可以分析CK2的脉宽410μs,周期3.3ms。因为清0信号的极性问题,下图的4013不能用74HC74代替。
4040的第7脚输出39kHz信号和CK1通过U3A合成含有4个脉冲的OUT信号,送驱动级。CK1和103}Ls通过U3A合成CK11,是CK1正脉冲的后一半为高的,周期为3.3ms的信号。CK21则是CK2正脉冲的后一半为高的,周期为3.3ms的信号。这些信号以后都有用。
2、发射驱动电路
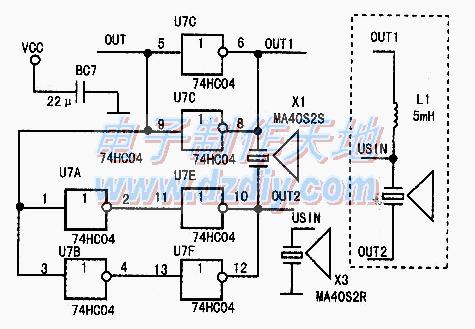
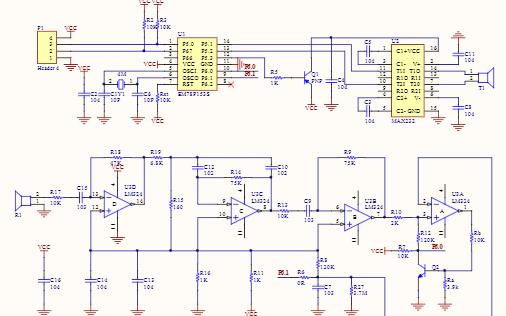
因为超声传感器的输入电容达2700pF之多,低压下用单个CMOS反相门驱动效果差,现在用两两并联推挽驱动(如下图所示)。虚框中是用收发两用头L1的电路。当发射时,L1和传感器串联谐振,加强发射;当接收时,OUT1和OUT2固定电平相当于交流接地,L1和传感器并联谐振,加强接收信号。理论上想得很好,实际试验效果很差。所以后面试验都是收发两个头做的。两个头并列安装,距离2.5cm,出口离地最小1cm,由于超声波长8.5mm.出口前加有0.5mm粗的金属防护条不会影响效果。
3、接收放大电路
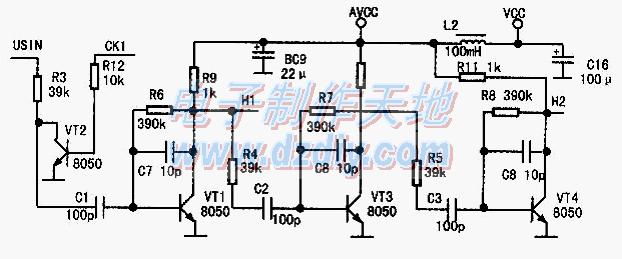
上图的三级5倍带通滤波器的计算与设计与上期类似,不过这里用晶体管代替运算放大器,原理是一样的,可以更省电,体积更小。信号从USIN进入,当CKl:1时,发射期间,VT2短路信号,防止强信号窜入放大器。放大的信号从Hl,H2输出。
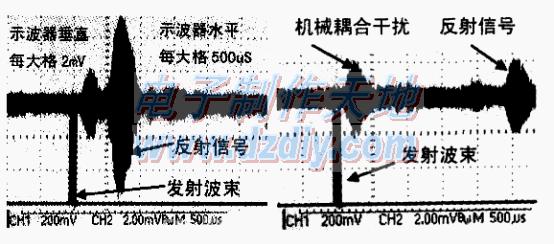
由于安装在同一块印制板上,有机械耦合。从中图、下图看出,在发射信号后300μs处有一个固定的接收峰(机械耦合),这个信号小于7cm距离地面的反射波信号,而与距离20~30cm的反射波信号大小相仿。而且背景杂音频率39kHz幅度约1mV。检测有一定难度。我们按信号强度Hl、H2分两段检波,按延迟时间(距离)分成三种情况分析:①距离地面7cm的情况,输入信号特别大,经过一级放大已经超过200mV(Vpp)这时把信号从Hl送到第一检波器。检波器检测到有信号,就有DETOUT2=1。这时第二检波器可能也收到信号(信号在410us处两边各一半).也可能收不到信号。②距离地面7cm~30cm,接收到的信号因距离由近到远而从很大逐步减小,最后被1mV(Vpp)的背景杂音淹没。同时信号的延迟从410μ~33mS放大器的放大倍数125倍,杂音放大到125mV,信号250mV以上时被第一检波器检测到,DETOUT1=1。这时DETOUT2:0,DETOUT1=l或0(较远情况)③距离地面30cm~50cm,信号检测不到,DETOUT2=DETOUT1=0。第一种情况,要求静音;第二种情况,要求变调发声;如果接收不到就同③;第三种情况要求发出警告性音调的声音。图中C16,L1,BC9用于电源滤波作用。
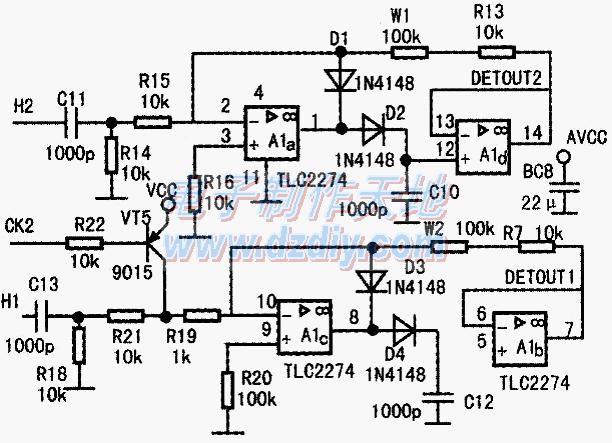
4.检波放大电路
一般的二极管检波器,由于二极管的正向压降而有损耗,特别是小信号情况。下图利用运算放大器的高增益,抵消了二极管的正向压降损耗实现理想检波。
H2的负半周经过Ala反相放大成为很大的正信号,通过D4到达Alb的正极性输入端,C12充电到峰值,Alb接成跟随器电路,第7脚信号永远和第5脚一致。R17和W2串联负反馈到A1c的第10脚。这时D3因反偏不起作用。Ala反相放大是有限制的,根据运算放大器的“虚开”和“虚短”的假设,在峰值时,14脚通过R17+W2反馈到2脚的电流和H2通过R15的电流之和为零。UH2/R15+U14/(R17+W2)=0,U14/UH2=-(R17+W2)/R15=-1~-10倍。H2负半周而又小于峰值时,反馈电流绝对值超过输入电流,把2脚拉高,1脚变低,D3导通吸收反馈电流。维持2脚和3脚电压相同。(虚短)当正半周情况,Ala反相放大输出1为低,D4不通,D3导通吸收正半周电流。调节电位器可以控制检波增益。
CK2=0期间VT5导通,检波输入端被拉高,输出DETOUT1=0。为了满幅度输出,这里要用所谓“轨至轨”
CMOS运放,用LM324不行。市售TLC2274常见SOD封装形式的,试验时做一个替换座转成DIP便于插拔。
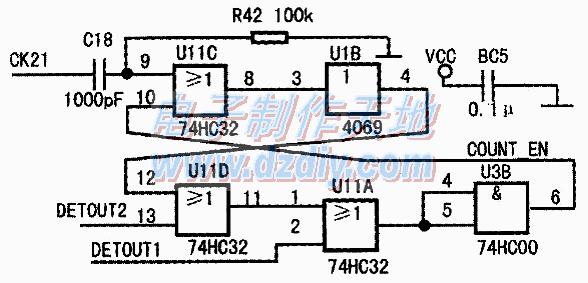
5.距离-脉宽-数字转换
电路如上图所示,CK21是S信号,CK21正脉冲上升时间,通过U11C=1,UIB=0,U1D=OU3B=1(指输出端),COUNT_EN=1(开始计数)返回到U11C的输入端完成—个R-S触发器的置位过程,虽然CK21上冲消失,依然存在置位状态。DETECT2是R信号,DETECT2=1,U11D=1,U3B=0,U11C=0,UIB=1;复位状态,COUNT_EN=0(停止计数)。DETECT1是优先复位信号,不论CK21有没有上冲,只要有DETECT1=1,就有COUNT_EN=0。
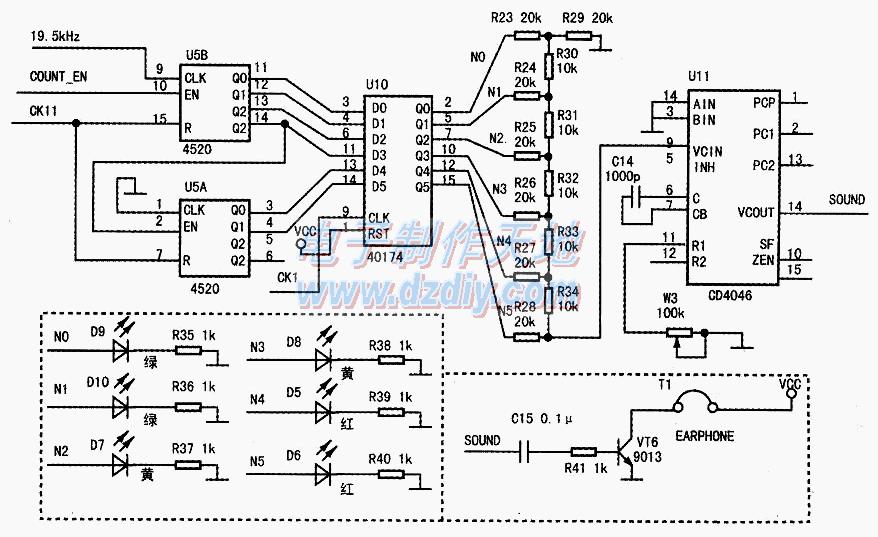
在下图中,U5-4520是双16进制计数器,COUNT_EN控制计数闸门,COUNT_EN的脉宽就含有多少个19.5KHz,就计多少数。这个数在CK1的上升时间,被锁存在U10-40174中。然后CK11来,把计数器清零,为下一次计数作准备。CK1上升时间与CK11有50uS的时间间隔。U5B与U5A的级联,U5B - Q3要接到U5A-EN,即用下降沿计数,U5B - Q3从1到0,高一位的计数加l。不能用CP。在试验阶段暂时将D5~ Dl0接入,检测N5~ NO的状态。这是典型的6位二进制数,N5~ NO= 000000~111111,表示距离由近到远。
6.数字-电压-音调转换电路。
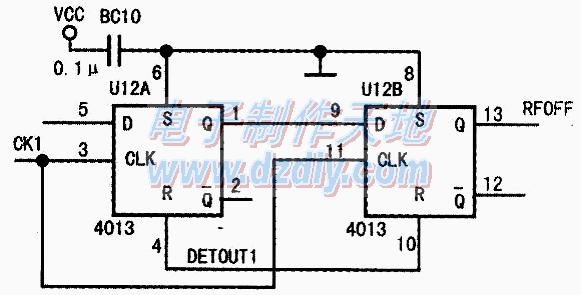
下图中R23~ R34构成R- 2R梯形D/A转换电路,关于其原理,教科书中有叙述,这里不再重复。电阻用5圈色环的,最后一圈是棕色的(1%)即可,最好用数字万用表测一下,挑选阻值接近标称值使用。N5~N0= 000000,对应输出电压0,N5~N0:111111,对应输出电压VCC乘63/64。共有64种不同电平。因为CK2的脉宽410uS期间不会有检波信号,实际0.8的数据不存在。4046是一块锁相环,主要用途是:数字频率合成、相位鉴别、V-F转换等。我们只用其V-F转换功能。直流电平加到U11 - 4046的压控振荡器的输入端9脚,电压越高,振荡频率越高。选择合适C14和调节W3,可以调节频率,该电阻电容影响V-F特性曲线的斜率。最高频率是输入Vcc情况,调到FMax=5KHZ,当输入9/64Vcc时音调下降到100HZ或更低,为了在下端能听到较高音调,在U11的12脚接一个100K -500K电阻,调到Fmin=100HZ。该电阻的接入影响V-F特性曲线向上平移动一个固定值。试验中可以VT6和耳机听。试验完后将SOUND接到无线发送模组。为了双脚交替发射,当某脚着地时,该脚的DETOUT1=1,U12A,B均清零,如右图所示。不管CK1是否来.RFOFF -直为0,关断该脚的无线发送模组。抬起脚,DETOUT1=0,CK1来两次,D触发器把Vcc从5脚的D送到1脚的Q,再送到13脚的Q,使RFOFF变高,启动该脚的无线发送模组。由于走路时不能两脚同时离地,只有抬起的脚有发射,实现双脚轮流导盲的目的。
设计时注意要在每块数字电路的电源到地之间接一个旁路电容器BCn。似乎没有多大用处。其实从提高可靠性来说很重要。因为各个信号都集中在某些时钟跳变的时刻变化,这时CMOS电路内部的NMOS管,PMOS管都导通,而且电平的跳变要对负载充放电,这个时刻电源电流突然很大,印刷电路板引线的分布电感阻碍电流突变,电源电压就瞬时下降,如果这时这块电路所有输出高电平的管脚上都带一个下跳的尖毛刺。同样地线的引线的分布电感造成所有输出低电平的管脚带一个上跳的尖毛刺。为了防止这种情况发生,旁路电容器BCn接在电路的VDD与GND之间,由于电容的电压不能跳变,大大减少了毛刺的发生。当然这个电容不能离开被保护的电路太远。
-
电路
+关注
关注
172文章
5922浏览量
172314 -
超声波
+关注
关注
63文章
3018浏览量
138415
发布评论请先 登录
相关推荐
超声波传感器的工作原理
超声波传感器的工作原理
如何采用STC89C52单片机实现超声波红外避障语音导盲仪设计
超声波传感器模块的工作原理是什么
超声波模块的工作原理与时序图学习
基于超声波传感器的导盲杖设计
超声波导盲仪设计原理是什么?超声波电子导盲手杖的设计资料概述
基于51单片机超声波红外避障语音导盲仪设计(全套资料)






 工商网监
工商网监
评论