 关于工业机器人的四类坐标系概述
关于工业机器人的四类坐标系概述
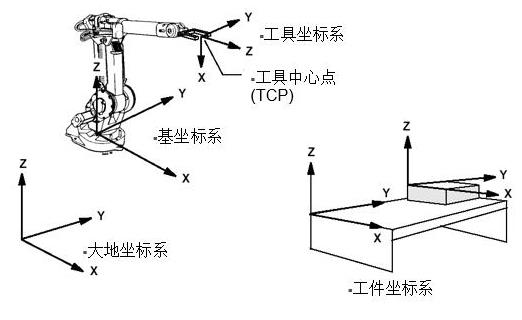
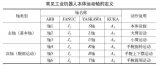
在我们工业机器人定义中,有四类坐标系,他们分别是轴坐标系、世界坐标系、工具坐标系、基座坐标系。
1、轴坐标系
(1)机器人每个轴均可以独立的正向或者反向移动。
(2)使用6D鼠标可以使轴运动。
2、世界坐标系
(1)世界坐标系是一个固定的直角坐标系,默认为世界坐标系位于机器人底部
(2)使用6D鼠标可以使轴运动。
()3)可以通过“mouse position”菜单调整鼠标的位置,使之与操作员操作位置相符,可以通过-/+软键改变位置,每次调整45°。
示意图一
示意图二
3、工具坐标系
工具坐标系是一个直接坐标系,原点位于工具上,请参考以下示意图:
4、基座坐标系
以目标工件货工作台为基准的直角坐标系。
5、坐标系的选择
坐标系可以根据机器人提供的人机对话控制面板进行选择:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28366浏览量
206887 -
工业机器人
+关注
关注
91文章
3359浏览量
92619
原文标题:工业机器人编程教程-坐标系统
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
abb机器人工具坐标系问题
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系
发表于 08-07 11:11
介绍坐标系和机器人之间的纽带即连杆坐标系
介绍坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在机器人上呢?这篇文章将介绍坐标系和机器人之间的纽带即连杆
发表于 09-01 06:17
机器人基坐标系标定方法研究
针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基
发表于 03-07 10:43
•2次下载
如何进行工业机器人运动轴的命名与常用坐标系的确定
随着社会进步、科技发展,工业机器人的应用也越来越普遍。由于其种类众多、运动轴与坐标系也很多,确定起来容易出错
机器人4大坐标系讲解
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
KUKA C4机器人的轨迹BASE与TOOL坐标
在工业机器人的操作、编程和调试时坐标系具有重要的意义。在机器人控制系统中定义了下列坐标系: ROBROOT
机器人坐标系用法和算法原理
一般都会定义机器人第一轴的旋转轴为基坐标系Z轴,旋转中心即是坐标系原点,X和Y的方向是的电机零点确定,所以只要你不更换电机的零点和机械结构,单个机器人里这个基
发表于 05-11 15:57
•1845次阅读

机器人坐标系选择指令和操作步骤
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
发表于 05-12 14:43
•2129次阅读

世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机



机器人中都有哪些坐标系
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?






 工商网监
工商网监
评论