 使用深度学习和OpenCV 进行视频目标检测
使用深度学习和OpenCV 进行视频目标检测

使用OpenCV和Python上对实时视频流进行深度学习目标检测是非常简单的,我们只需要组合一些合适的代码,接入实时视频,随后加入原有的目标检测功能。
本文分两个部分。在第一部分中,我们将学习如何扩展原有的目标检测项目,使用深度学习和OpenCV将应用范围扩展到实时视频流和视频文件中。这个任务会通过VideoStream类来完成。
深度学习目标检测教程:http://www.pyimagesearch.com/2017/09/11/object-detection-with-deep-learning-and-opencv/
VideoStream类教程:http://www.pyimagesearch.com/2016/01/04/unifying-picamera-and-cv2-videocapture-into-a-single-class-with-opencv/
现在,我们将开始把深度学习+目标检测的代码应用于视频流中,同时测量FPS处理速度。
使用深度学习和OpenCV进行视频目标检测
为了构建基于OpenCV深度学习的实时目标检测器,我们需要有效地接入摄像头/视频流,并将目标检测应用到每一帧里。
首先,我们打开一个新文件,将其命名为real_time_object_detection.py,随后加入以下代码:
我们从第2-8行开始导入封包。在此之前,你需要imutils和OpenCV3.3。在系统设置上,你只需要以默认设置安装OpenCV即可(同时确保你遵循了所有Python虚拟环境命令)。
Note:请确保自己下载和安装的是OpenCV3.3(或更新版本)和OpenCV-contrib版本(适用于OpenCV3.3),以保证其中包含有深度神经网络模块。
下面,我们将解析这些命令行参数:
与此前的目标检测项目相比,我们不需要图像参数,因为在这里我们处理的是视频流和视频——除了以下参数保持不变:
--prototxt:Caffeprototxt文件路径。
--model:预训练模型的路径。
--confidence:过滤弱检测的最小概率阈值,默认值为20%。
随后,我们初始化类列表和颜色集:
在第22-26行,我们初始化CLASS标签,和相应的随机COLORS。有关这些类的详细信息(以及网络的训练方式),请参考:http://www.pyimagesearch.com/2017/09/11/object-detection-with-deep-learning-and-opencv/
现在,我们加载自己的模型,并设置自己的视频流:
我们加载自己的序列化模型,提供对自己的prototxt和模型文件的引用(第30行),可以看到在OpenCV3.3中,这非常简单。
下一步,我们初始化视频流(来源可以是视频文件或摄像头)。首先,我们启动VideoStream(第35行),随后等待相机启动(第36行),最后开始每秒帧数计算(第37行)。VideoStream和FPS类是imutils包的一部分。
现在,让我们遍历每一帧(如果你对速度要求很高,也可以跳过一些帧):
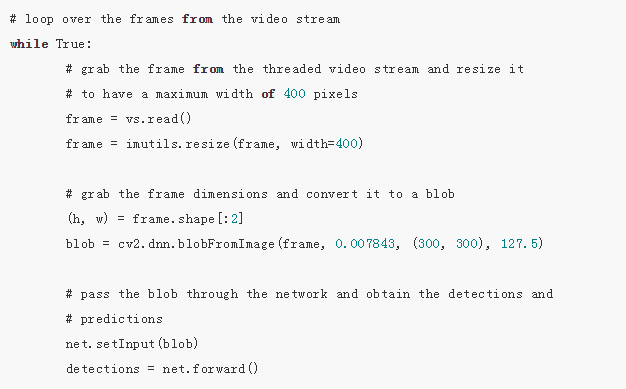
首先,我们从视频流中读取一帧(第43行),随后调整它的大小(第44行)。由于我们随后会需要宽度和高度,所以我们在第47行上进行抓取。随后将frame转换为一个有dnn模块的blob(第48行)。
现在,我们设置blob为神经网络的输入(第52行),通过net传递输入(第53行),这给我们提供了detections。
这时,我们已经在输入帧中检测到了目标,现在是时候看看置信度的值,以判断我们能否在目标周围绘制边界框和标签了:
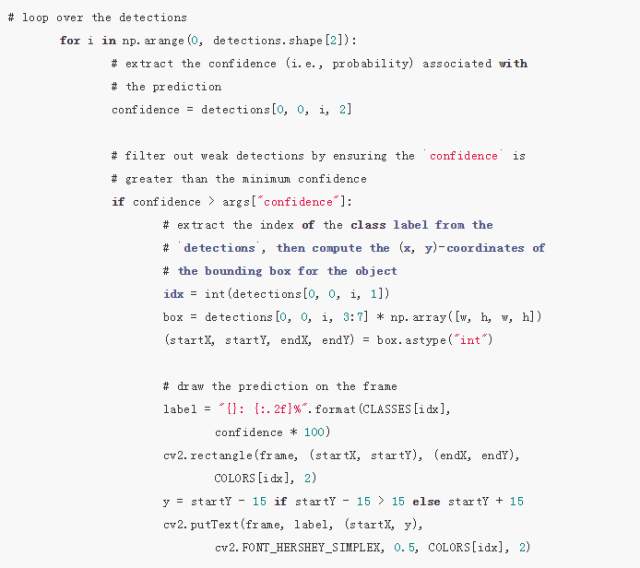
我们首先在detections内循环,记住一个图像中可以检测到多个目标。我们还需要检查每次检测的置信度(即概率)。如果置信度足够高(高于阈值),那么我们将在终端展示预测,并以文本和彩色边界框的形式对图像作出预测。让我们逐行来看一下:
在detections内循环,首先我们提取confidence值(第59行)。
如果confidence高于最低阈值(第63行),那么我们提取类标签索引(第67行),并计算检测到的目标的坐标(第68行)。
然后,我们提取边界框的(x,y)坐标(第69行),之后将用于绘制矩形和文本。
我们构建一个文本label,包含CLASS名称和confidence(第72、73行)。
我们还要使用类颜色和之前提取的(x,y)坐标在物体周围绘制彩色矩形(第74、75行)。
通常,我们希望标签出现在矩形上方,但是如果没有空间,我们将在矩形顶部稍下的位置展示标签(第76行)。
最后,我们使用刚才计算出的y值将彩色文本置于帧上(第77、78行)。
帧捕捉循环剩余的步骤还包括:(1)展示帧;(2)检查quit键;(3)更新fps计数器:
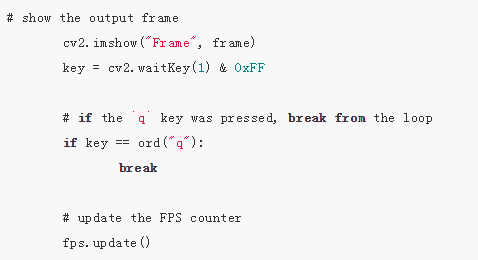
上述代码块简单明了,首先我们展示帧(第81行),然后找到特定按键(第82行),同时检查「q」键(代表「quit」)是否按下。如果已经按下,则我们退出帧捕捉循环(第85、86行)。最后更新fps计数器(第89行)。
如果我们退出了循环(「q」键或视频流结束),我们还要处理这些:
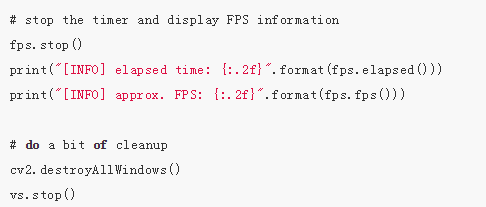
当我们跳出(exit)循环,fps计数器停止(第92行),每秒帧数的信息向终端输出(第93、94行)。
我们关闭窗口(第97行),然后停止视频流(第98行)。
如果你到了这一步,那就可以做好准备用自己的网络摄像头试试看它是如何工作的了。我们来看下一部分。
实时深度学习目标检测的结果
为了实时深度学习目标检测器正常运行,确保你使用本指南「Downloads」部分中的示例代码和预训练的卷积神经网络。(请打开原文链接,进入「Downloads」部分,输入自己的邮箱地址,获取所需代码和其他资料。)
打开终端,执行下列命令:
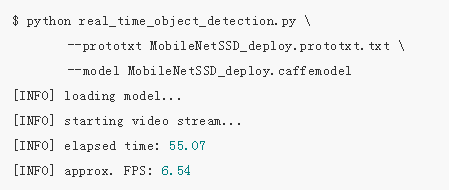
如果OpenCV能够访问你的摄像头,你可以看到带有检测到的目标的输出视频帧。我对样本视频使用了深度学习目标检测,结果如下:
图1:使用深度学习和OpenCV+Python进行实时目标检测的短片。
注意深度学习目标检测器不仅能够检测到人,还能检测到人坐着的沙发和旁边的椅子——所有都是实时检测到的!
总结
今天的博客中,我们学习了如何使用深度学习+OpenCV+视频流来执行实时目标检测。我们通过下列两个教程完成了这一目标:
1.使用深度学习和OpenCV进行目标检测(http://www.pyimagesearch.com/2017/09/11/object-detection-with-deep-learning-and-opencv/)
2.在OpenCV上进行高效、线程化的视频流(http://www.pyimagesearch.com/2016/01/04/unifying-picamera-and-cv2-videocapture-into-a-single-class-with-opencv/)
最终结果是基于深度学习的目标检测器可以处理6-8个FPS的视频(当然,这也取决于你的系统速度)。
你还可以通过以下途径进一步提升速度:
1.跳过帧。
2.使用MobileNet的不同变体(速度更快,但是准确率下降)。
3.使用SqueezeNet的量子化变体(我还未对此进行测试,但是我想应该会更快,因为它的网络足迹更小)。
-
OpenCV
+关注
关注
33文章
652浏览量
45084 -
深度学习
+关注
关注
73文章
5607浏览量
124624
原文标题:深度学习 + OpenCV,Python实现实时目标检测
文章出处:【微信号:magedu-Linux,微信公众号:马哥Linux运维】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
如何在OpenCV中使用基于深度学习的边缘检测?

如何用OpenCV的相机捕捉视频进行人脸检测--基于米尔NXP i.MX93开发板
【HarmonyOS HiSpark AI Camera】基于深度学习的目标检测系统设计
如何使用OpenCV、Python和深度学习在图像和视频中实现面部识别?
探究深度学习在目标视觉检测中的应用与展望
OpenCV使用深度学习做边缘检测的流程






评论