 我国研发出基于镓基室温液态金属的新型机器人驱动器
我国研发出基于镓基室温液态金属的新型机器人驱动器
据悉,中国科学技术大学精密机械与精密仪器系张世武副教授研究团队与其合作者组成的联合研究组,设计出基于镓基室温液态金属的新型机器人驱动器,首次实现了液态金属驱动的功能性轮式移动机器人。
镓基室温液态金属具有独特的表面性质及理化特性,可以通过电场、磁场以及浓度梯度场等多种能量场或者表面改性等方式,实现变形、移动、分离以及融合等多种形态学变化,在微流体、生物医学以及机器人等领域有巨大的应用前景。然而,液态金属在机器人领域的应用研究,目前仅局限于以液态金属液滴为机器人本体,尚无基于液态金属的功能性机器人的研究报道。
研究人员首先设计出一种具有超疏水表面的极轻半封闭轮式结构,将液态金属液滴限制在狭长的轮体内部,然后,通过巧妙设计的随动微型电极支架施加外部电场驱动轮体内液态金属运动,进而持续改变轮式机器人的重心,驱动轮式机器人滚动。同时,研究人员对新型液态金属机器人做了动力学建模与分析,并通过实验探索电解液浓度、施加电压、液态金属体积、轮体结构等参数对机器人运动性能的影响,获得驱动运动的最佳参数匹配。最后,通过集成电池系统,研究人员成功设计出新型液态金属自驱动轮式移动机器人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
53文章
8302浏览量
147231 -
机器人
+关注
关注
211文章
28745浏览量
208907
原文标题:我国学者研发出液态金属驱动机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
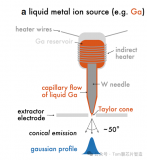
聚焦离子束技术中液态镓作为离子源的优势
作为离子源的优势在FIB技术中,金属镓被广泛用作离子源,这与其独特的物理特性密切相关。镓的熔点仅为29.76°C,这意味着在室温稍高的情况下,镓

【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
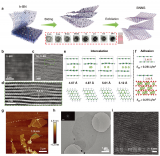
利用液态金属镓剥离制备二维纳米片(2D NSs)的方法
本文介绍了一种利用液态金属镓(Ga)剥离制备二维纳米片(2D NSs)的方法。该方法在接近室温下通过液态
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
与未来,涵盖如基于行为的人工智能、生物启发的进化人工智能及认知机器人技术的发展。这一历史背景为随后的大模型驱动的具身智能讨论奠定了基础,随着人工智能模型复杂性和能力的不断提升,这一主题也变得愈加
发表于 12-28 21:12
为什么要用液态镓作为FIB的离子源
,线路修改,观察,TEM制样等。 为什么用金属镓做离子源? 镓的熔点为 29.76°C,在室温稍高的条件下即为液态,这使其非常适合操作。
伺服驱动器在机器人中的应用案例
在现代工业自动化和智能制造领域,机器人技术的发展日新月异,而伺服驱动器作为机器人系统中的关键组件之一,扮演着至关重要的角色。 1. 伺服驱动器的基本原理 伺服
液态金属天线应用领域
液态金属天线是一种新型的天线技术,它利用液态金属的独特性质来实现天线的功能。这种天线具有许多传统天线无法比拟的优势,因此在许多领域都有广泛的
柔性机器人与刚性机器人区别与联系
、伸缩和变形。其结构通常模仿生物体的柔性和弹性特征。 刚性机器人:由刚性材料(如金属、硬质塑料等)制成,具有固定形状和结构,无法轻易变形。 2.运动方式 柔性机器人:通过柔性驱动(如气

Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
液态金属镓的罐装与包装过程正面临着从传统向智能化转型
在工业自动化迅猛发展的今天,液态金属镓的罐装与包装过程正面临着从传统向智能化转型的迫切需求。富唯智能AMR复合机器人凭借其前沿技术的应用和精准控制的能力,为

乐聚机器人与江苏亨通携手研发人形机器人专用线束
近日,乐聚(深圳)机器人技术有限公司与江苏亨通集团达成重要战略合作,共同致力于人形机器人专用线束及相关线缆产品的研发工作。这一举措旨在推动人形机器人线材和线缆连接
FMEA在手术机器人研发中的应用
在医疗科技飞速发展的今天,手术机器人已经成为精准医疗的重要工具。然而,如何确保手术机器人在研发过程中能够稳定、可靠地运行,避免潜在的风险和失误,是摆在研发团队面前的一大挑战。此时,失效
北航成功研发微尺寸仿生机器人——昆虫机器人
据中央电视台报道,北京航空航天大学科研团队历经15年,成功研发出微尺寸仿生机器——“昆虫”机器人。这款机器人设计灵感源于蟑螂,外形如同硬币,重量与相应体型的昆虫相近,约200毫克。
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
(运动控制)、 伺服驱动器 、IO模块和电源系统4个部分。
机器人控制系统
机器人控制器是机器人的核心部分,主要控制
发表于 05-11 09:40
高压放大器在介电弹性体折纸术软体机器人中的应用
实验名称:柔性驱动器的性能测试
研究方向:机器人的发展史已经超过了100年,机器人也逐渐从复杂笨重,功能单一的传统机器人进化为更为智能、微型且高集成的多功能
发表于 02-27 17:15





 工商网监
工商网监
评论