 无人驾驶如何做出道德选择?
无人驾驶如何做出道德选择?
自动驾驶汽车导致的不同事故中选择谁应幸存、谁应死亡。该实验结果发表在2018年10月24日《自然》(Nature)杂志上。
幸运的是,这类涉及生死的残酷选择在现实中十分少见,而且自动驾驶汽车总体来说更安全,使得这种两难困境更为罕见。但是,许多哲学家和工程师都认为,自动驾驶系统在日常行车中,应该包含针对这种两难困境的执行方案。“我认为,在现实中这个关键性问题每天也将多次遇到,只不过不像电车难题这么极端。”加州理工大学哲学教授Patrick Lin说。他从事新兴技术伦理学的研究,与该项实验无关。
事实上,现实生活中一些司机已经做出了类似的选择,却往往没有意识到。在统计意义上讲,每一次加利福尼亚式停车(司机看到停车标志并未完全刹住车,而是低速通过该标志)、匹兹堡式左转(这是一种驾驶默契,即如果路口第一辆车想要左转,在变绿灯的时候,左转车会抢先于对面直行车先走,但这样会给直行的行人带来意外伤害)或者其他没有把握的驾驶行为都有一定概率剥夺一个人的生命。
“道德机器”网站向用户展示了一幅漫画,画的是一辆汽车冲向人行横道上的行人。受试者可以选择突然转向,冲撞其他人群。另一种选择是冲向混凝土路障,这会导致车内乘客死亡。与其他版本的电车问题不同,这是在两组受害者之间做出直接选择,而不需要额外想象人被伤害的方式。你有足够的时间权衡这两种选择。预设的受害者在人数、年龄、性别和其他方面各不相同:可能是拄着拐杖走路的老人,推车婴儿车的妇女,抑或是提着一袋子钱的小偷。行人也可能闯红灯,在路上可能还会见到一辆只坐着猫狗的汽车,毕竟这是自动驾驶汽车。
这个网站在2016年6月上线,作者公布了截至2017年12月采集到的数据。这个网站主要通过口口相传,YouTube视频制作者PewDiePie和jacksepticeye也对网站进行了宣传推广。如果想比较自己和他人的决定,受试者必须填写一份人口统计调查问卷,约50万人选择这样做。其中主要是男性(男女比例为3:1)和年轻人(18岁最多)。
人类如何作出选择?
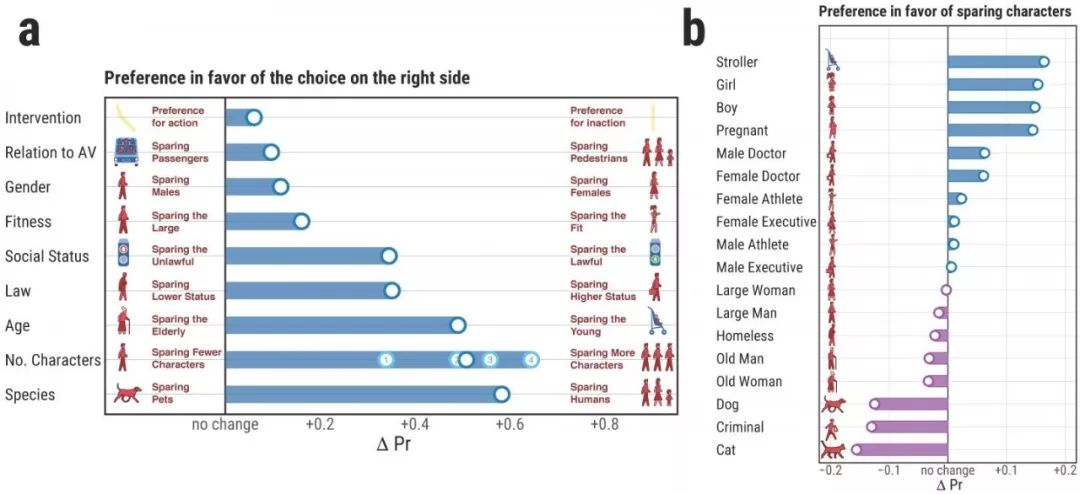
受试者对应该采取的措施达成了广泛共识。他们强烈倾向于优先保护人类(而非宠物)、群体(而非个人)、小孩(而非老人)、遵守交规的人(而非不守交规、横穿马路的人),形象光鲜的上班族(而非衣着破烂的流浪者)、女性(而非男性)、行人(而非汽车中的乘客)、慢跑者(而非身材魁梧的人)。选择突然转向和按原路线行驶在受试者中各占一半——他们对是否采取转向操作没有偏向。“这是他们最不关心的问题。”这研究的其中一位作者、不列颠哥伦比亚大学Azim Shariff说。
如果是你,你会选择让哪一群体生还,过马路的行人还是车上的乘客?
不同群体、不同国家的人只在强调他们自身属性的情况下会出现分歧。例如,有个版本的电车难题是说,电车正朝着躺在轨道上的五人驶来。五个人和列车之前有一座天桥,你可以选择推落一个人,掉落的人能使电车停下,从而挽救铁轨上的人,但会导致被推落的那个人会死亡。受试者普遍选择将男人推落,但男性受试者稍显不愿意。“不存在这样道德尺度上的差别。
例如,不存在老年人比年轻人更受青睐的情况,也不存在采取行动者比坐以待毙者更受欢迎的情况。”Shariff说,“只是对于某些国家而言,与其它更优先的道德事项相比,这些方向上的道德优先级要低一些。”
例如,在拉丁美洲,年轻人受到最高级别的重视;而在欧洲和北美,受重视程度次之;在亚洲,受重视程度最少。但地理因素并非决定性因素。在重视年轻人的问题上,捷克人和拉美人反应程度相近,斯里兰卡人和西欧人反应程度相近。
诸多差异影响道德抉择
研究人员引入了其他指标来评估国家间显现的结果差异。例如,研究人员将青年男性收入作为衡量贫富国家的标准。研究发现,来自较贫穷国家的人不太容易选择冲撞行人;同样地,那些贫富差距较大的国家的人倾向于保护衣着光鲜的上班族;那些来自性别平等国家的人对女性更具骑士精神,这也产生了一个奇怪的结果:在测试的两难选择中,全球受试者对优先保护女性的偏好已超过半数,来自性别平等国家的被试者甚至更偏向这一选项。因此,在这场测试游戏中,性别平等的国家实际上在两难抉择中,恰恰反映出性别最不平等的现象。
各种条件下人类会作出不同的抉择
最明显的分歧不是全世界受试者之间的分歧,而是他们和专家之间的分歧。弗吉尼亚交通研究委员会的研究科学家Noah Goodall说:“人们会提议一些不道德的行为,比如把保护狗的优先级置于保护罪犯之上。”人们对电车困境问题(以及其他许多问题)的道德本能和在生活中并不一致。在此前的一系列研究中,Shariff和图卢兹经济学院的Jean-François Bonnefon以及麻省理工学院媒体实验室的Iyad Rahwan调查了近2000人对自动驾驶汽车的看法。
去年,德国交通部采纳了一个由14名成员组成的道德委员会的建议,禁止试图使用性别或年龄差别来解决电车困境。“我在‘道德机器’实验中看到的最大价值在于,这有助于发现需要解决分歧的关键领域。”Lin说。如果有时间进行反思,大多数受访者很可能会同意专家的观点。“至于人们在网上游戏测试的倾向是否和现实中的表现相同,我们还不得而知。”Shariff说。
许多伦理学家比受试者更能区分是否采取行动。Lin说:“如果你必须在主动杀死别人(kill them)和被动让别人死亡(let them die)两种罪恶之间做出选择,那么后者的罪恶会稍微轻一些,这就是为什么在电车问题上不采取行动是能被接受认可的原因。”他表示不采取行动是有局限的,如果要在一名路人和十名乘客之间该怎么选择?但调查参与者考虑选择最佳实用性也同样会有局限。在2015年的一篇论文中,Lin提到一个两难问题:是撞一个戴头盔的骑车人,还是撞不戴头盔的?撞击戴头盔的人更有可能存活下来。但如果是否戴了头盔决定你会不会被撞,谁还会选择戴头盔呢?事实上,一些骑车人已经会借口因为司机倾向去撞有头盔的人,来给自己不戴头盔的行为进行开脱。
道德抉择有待时间考验
怀疑论者反对说,整个测试过程过于简单,没有多大用处。Goodall说:“这些场景看似可能发生,但实际上难以成立。”它描述了一连串不可思议的故障:在步行区驾驶汽车,以高速公路速度行驶,并且刹车失灵。更糟糕的是,他们假设驾车人对事件有完备的认知并能清楚地预料到可能出现的所有后果。但通常,我们并非是在沉着的理性认知中权衡利弊、进行操作。代尔夫特理工大学研究技术伦理学的教授Aimee van Wynsberghe说:“尽管作者认同这个缺陷,但他们没有意识到这个缺陷非常致命。”她认为自动驾驶汽车应该被限制在专用的高速公路上行驶,在那里他们不需要进行繁琐的道德计算。
不过,Lin认为,这个项目就同其他任何科学实验一样,将问题分解到本质,使其更易于处理。他说:“的确,像大多数的科学实验一样,这个实验是人为设计的,但这并不能说明它是无效的。”电车问题让人们讨论了几个有争议的原则:不采取行动是否等同于采取行动,涉及的人数是否重要,以及某类生命体是否比其他生命体更具价值。现在,汽车公司应该好好考虑下这些权衡取舍的问题了。“他们会提前一到五年规划出这些决策。”Lin说,“即便他们真的陷入这种两难困境,他们比真人反应的时间也多得多。”
Shariff说,“道德机器”也可以用来研究机器伦理学的其他问题,例如法院和假释委员会用来预测累犯风险的算法。这套系统能提供更为准确的预测,有助于降低社会整体犯罪率,减少监狱中被关押的人数。但如果这种减少在不同种族或其他类别中有明显差异,则会打破分析预测的平等性。人们能够接受这种妥协吗?“我们应该优先考虑它的准确性,还是应该优先考虑平等(即使这意味着为了平等而把更多不必要的人关进监狱)?”他补充道。从定义上讲,两难困境并没有一个简单的解决办法,但我们至少应该仔细考虑各种选择,并能够捍卫我们的选择。
-
无人驾驶
+关注
关注
98文章
4072浏览量
120610 -
自动驾驶汽车
+关注
关注
4文章
376浏览量
40840
原文标题:无人车失控,如何作出生死抉择?人类指示:先牺牲男性
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
小马智行第六代无人驾驶Robotaxi亮相香港国际机场
测速雷达与无人驾驶技术的结合 测速雷达故障排除技巧
UWB模块如何助力无人驾驶技术
特斯拉推出无人驾驶Model Y
百度计划海外推出萝卜快跑无人驾驶服务
易控智驾无人驾驶项目落地红沙泉露天煤矿
5G赋能车联网,无人驾驶引领未来出行

无人驾驶汽车应用晶振TSX-3225

爱普生的惯性测量单元(IMU)M-G370PDT成为无人驾驶的理想选择
中国或支持特斯拉测试无人驾驶出租
如何利用无人机物联卡实现无人驾驶飞行

5G车载路由器引领无人驾驶车联网应用

小马智行启动深圳中心城区无人驾驶商业化运营






 工商网监
工商网监
评论