 高精度地图测绘行业迎来黄金时期
高精度地图测绘行业迎来黄金时期
时间回到2001年,一位斯坦福大学教授带着他的几名学生同两位谷歌公司创始人——拉里佩奇与谢尔盖布林秘密会见。两位谷歌创始人提出了一个设想:“假如你可以去到世界上的任意一条马路会怎么样?”
六年后,谷歌地球发布了街景功能,但是,他们又觉得只能用电脑看太没意思了,他们想在这些马路上驾驶。
谷歌的自动驾驶项目自2009年创建,现已成为Alphabet(谷歌母公司)的子公司Waymo,自动驾驶计划已经快要成为现实。在自动驾驶车上,百千万行代码用于实现识别车道线和行人等等环境内容,还需以千万计的里程来优化车辆控制。
即便是搭载着极其先进的传感器和高清摄像头,自动驾驶车想在纽约或者其它特大城市进行自动驾驶还是有点难度。雨水和大雪,甚至老旧的道路都有可能使自动驾驶失效,更别说多变的行车环境。
早在2017年,谷歌就已将街景车完全升级换代,除了摄像头,这些车子还配备了激光雷达,可以扫描创建它们所处环境的三维模型。
除此之外,谷歌的机器学习和AI可以从拍摄到的照片中识别出街道名门牌号和商铺名称等等,并且实时传送到云端服务器更新现有的地图数据库,据悉,在未来可能还能识别出街边商店的类型和营业时间。
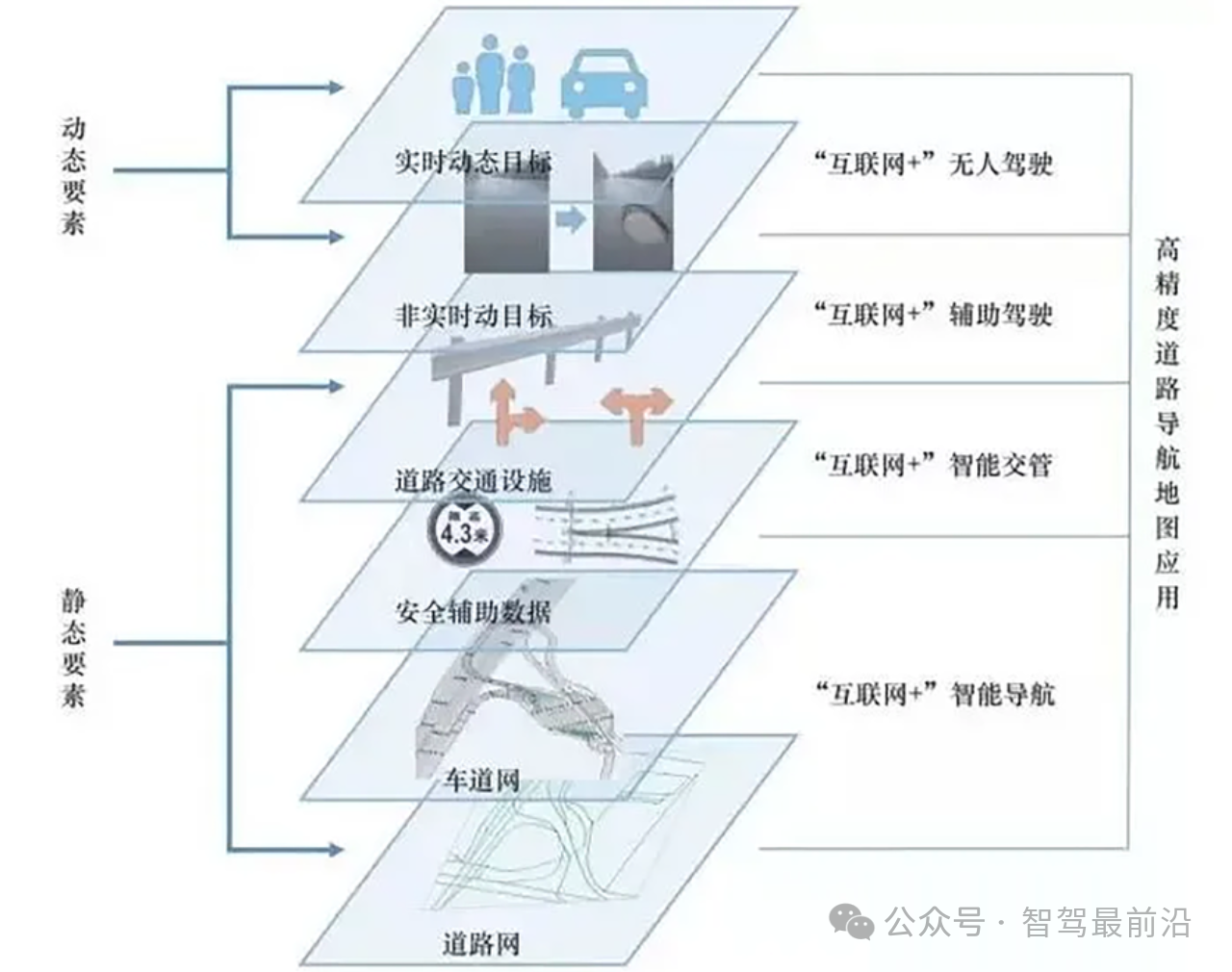
通过谷歌街景车的摄像头和激光雷达的数据生成高精度三维地图之后,Waymo就可以不必在道路标线和路口上耗费太多精力,从而可以顾及例如行人或骑车人这类变数更多的情况。
再者,令自动驾驶车困扰的恶劣天气,如果高精度地图能时时保持最新,自动驾驶车即可从包含大量语义化信息的高精度地图里得知一些重要的路面情况还有可以行驶的区域。
当行驶到一个被积雪覆盖的停车指示牌前,自动驾驶车也能够自动停车,这是因为高精度地图的数据是在天气晴朗的情况下采集的,所有路面指示信息都已储存在其中。
除去一些谷歌这样的老牌大公司,近年已有越来越多的高精度地图初创公司出现,乘着自动驾驶车的东风,现在可谓是高精度地图测绘行业的黄金时期。
Deepmap是一家做3D高精度地图测绘的初创公司,近期成功融得1亿美元用于测绘公路,这家公司可提供包括软硬件在内的一体化解决方案,客户可以将采集到的数据透过这套系统生成自定义的高精度地图。据悉,Deepmap已与福特、本田还有上汽集团等汽车制造商进行合作。
此外,还有HERE、Civil Maps、TomTom和lvl5等高精度地图公司在激烈竞争着。
为了扩展到更多的城市,像Zoox、Cruise和Drive.ai这样的自动驾驶公司将需要自行建立或者与现有的高精度地图公司合作。
对高精度地图的缺失极有可能成为这些自动驾驶公司的绊脚石。随着自动驾驶的不断发展,对这些地图的需求会越来越高。
Lyft近期收购的Blue Vision就表明了它的野心,Blue Vision的首席工程师卢克文森特曾是谷歌街景的高级工程负责人。
Blue Vision使用智能手机的摄像头和GPS来采集信息,在这之后Lyft可以将激光雷达采集好的数据与Blue Vision的数据进行融合。
通过众包的模式,Lyft在全美国的运行车辆将会开始采集数据,这种众包模式采集数据的速度可能会赶上甚至超越谷歌。
“你拥有的数据量决定了你的系统有多可靠,我们的技术可以让我们通过Lyft的运营车队来训练自动驾驶车。”Blue Vision的CEO皮特说。
在未来,风险投资公司会继续向他们认为有竞争力的高精度地图公司注入大量资金,然后自动驾驶车的初创公司们则可能会跟投甚至完全收购。
虽然谷歌街景早已打好基础取得优势,内容涵盖了地球上每个国家的主要城市。在使用激光雷达再度扫描之后,谷歌街景将为Waymo铺平扩张的道路。
高效率高准确度的地图公司会有不错的未来。
-
谷歌
+关注
关注
27文章
6142浏览量
105099 -
自动驾驶
+关注
关注
783文章
13684浏览量
166147
原文标题:谷歌街景车正采集高精度地图,图商竞争愈发激烈 | GGAI视角
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
移远通信发布高精度GNSS模组LG580P
移远通信推出全星系多频段高精度定位定向GNSS模组LG580P,引领高精度导航新时代

抛弃高精度地图旧模式,走向视觉感知新时代?
钢结构加工新选择:激光切管机引领高精度切割潮流
高精度定位平板主要应用在哪些领域
什么是高精度定位平板?
北斗高精度定位终端适用于什么行业场景


移远通信推出“全系统+全频段”高精度GNSS定位模组LG290P,赋能高精度定位应用
三防笔记本丨工业笔记本电脑丨助力测绘行业的数字化转型
美团取得构建高精地图专利
GNSS技术助力航海业迈向新时代:海洋测绘与航行的创新应用
电感多少精度算高精度
GNSS终端:位移高精度监测视角下的技术突破






 工商网监
工商网监
评论