 谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤
谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤
本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。
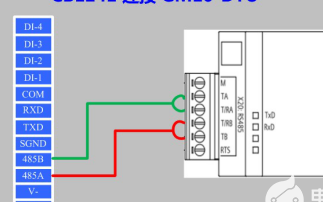
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。具体接线方式如下示意图:
步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA的底层设置原因,最好不更改机器人IP地址)
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到,也可以私信找电气技术微课堂小编索要。
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到PLC。下载完成后PLC会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。也可以使用此方法判断是否连接成功。
步骤3:WorkVisual对KUKA进行设置
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
步骤5:双击Profinet进行设置
步骤6:进行信号映射
首先生成代码,再下载到控制器,注意在控制器上做好确认工作
步骤7:机器人侧的信号确认:
器人侧即为映射时的IN(..),PLC侧则是在博图里对KUKA设备设置时的IO地址
-
plc
+关注
关注
5012文章
13314浏览量
463849 -
工业机器人
+关注
关注
91文章
3367浏览量
92709
原文标题:KUKA工业机器人与S7-1200PLC实现Profinet通讯步骤详解图文版
文章出处:【微信号:GKB1508,微信公众号:工控帮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ABB工业机器人与西门子S-1200 PLC通信的实现
profinet转ethernet网关连接发那科机器人配置案例
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
西门子1200PLC与海康机器人SC2000系列视觉传感器顺畅连接
如何将S7-1200PLC连接到EMCP物联网云平台
利用Modbus采集网关采集西门子S7-1200plc数据


EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统


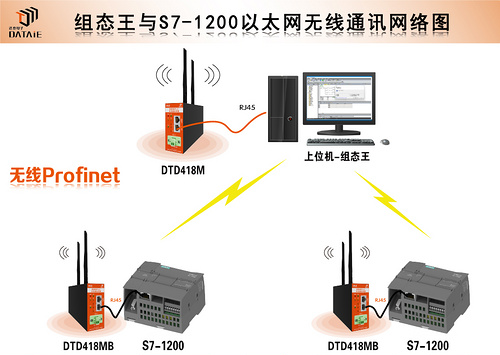
组态王与S7-1200PLC之间 Profinet无线以太网通信






 工商网监
工商网监
评论