 用于无人车交通环境感知的视觉主导的多传感器融合计算框架
用于无人车交通环境感知的视觉主导的多传感器融合计算框架
人类驾驶与自主驾驶在对交通环境的理解方式上有着明显差别。首先,人主要通过视觉来理解交通场景,而机器感知需要融合多种异构的传感信息才能保证行车安全。其次,一个熟练的驾驶员可以轻松适应各种动态交通环境,但现有的机器感知系统却会经常输出有噪声的感知结果,而自主驾驶要求感知结果近乎100%准确。
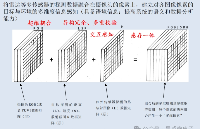
本文提出了一种用于无人车交通环境感知的视觉主导的多传感器融合计算框架,通过几何和语义约束融合来自相机、激光雷达(LIDAR)及地理信息系统(GIS)的信息,为无人车提供高精度的自主定位和准确鲁棒的障碍物感知,并进一步讨论了已成功集成到上述框架内的鲁棒的视觉算法,主要包括从训练数据收集、传感器数据处理、低级特征提取到障碍物识别和环境地图创建等多个层次的视觉算法。所提出的框架里已用于自主研发的无人车,并在各种真实城区环境中进行了长达八年的实地测试,实验结果验证了视觉主导的多传感融合感知框架的鲁棒性和高效性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51014浏览量
752993 -
无人车
+关注
关注
1文章
301浏览量
36469
原文标题:无人车自主定位和障碍物感知的视觉主导多传感器融合方法
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

多传感器融合在自动驾驶中的应用趋势探究
自动驾驶技术的快速发展加速交通行业变革,为实现车辆自动驾驶,需要车辆对复杂动态环境做出准确、高效的响应,而多传感器融合技术为提升自动驾驶系统

精密制造的革新:光谱共焦传感器与工业视觉相机的融合
在现代精密制造领域,对微小尺寸、高精度产品的检测需求日益迫切。光谱共焦传感器凭借其非接触、高精度测量特性脱颖而出,而工业视觉相机则以其高分辨率、实时成像能力著称。两者的融合,不仅解决了传统检测方式在

人形机器人感知系统的特点:多模态感知、高精度、实时性
电子发烧友网报道(文/李弯弯)感知系统是人形机器人实现智能交互和自主行动的关键组成部分。该系统通常包括多种传感器和算法,用于收集、处理和分析来自外部环境的信息。不同企业所采用的
黑芝麻智能推出基于武当C1296芯片多域融合计算平台方案
多域融合计算是汽车智能化发展的必然趋势,它可以简化整车电子电气架构,提高计算效率,降低成本。
智慧灯杆多合一传感器(创新设计,实现多功能融合)
智慧灯杆多合一传感器的最大特点就是创新的设计,将多种功能集成在一个灯杆上。它不仅仅能够提供照明服务,还能够实时监测空气质量、温度、湿度等环境数据,甚至能够感知人流、车流等信息。这种
Cadence扩充Tensilica IP产品阵容,强化汽车传感器融合计算能力
全球电子设计自动化和半导体IP解决方案的领先企业楷登电子(Cadence)近日宣布,其进一步扩展了Tensilica IP产品系列,以满足汽车行业中日益增长的传感器融合应用计算需求。新推出
手机环境光传感器,泄露用户隐私?
来源:刹客网络科技资讯,谢谢编辑:感知芯视界 Link 麻省理工学院计算机科学和人工智能实验室(CSAIL)的一项研究论文显示,Android 和 iPhone 手机的环境光传感器可以

视觉传感器的应用有哪些?
视觉传感器的视觉检测系统提供基于图像的自动化检测,方便进行各种工业和制造应用。虽然2D和3D视觉传感器不是一项新技术,但现在通常
视觉传感器的定义、结构和原理、作用及应用
视觉传感器是一种常见的传感器,它可以将光学信号转化为数字信号,用于实现图像采集、处理和分析等功能。在当今智能化的时代,视觉






 工商网监
工商网监
评论