 伯克利的研究人员提出了一种通用的自适应感知方法AdaSearch
伯克利的研究人员提出了一种通用的自适应感知方法AdaSearch

编者按:在自适应搜索问题中,经常会需要机器人在很强的背景干扰情况下定位目标位置。在本文中,伯克利的研究人员提出了一种通用的自适应感知方法AdaSearch,能快速定位目标点。以下是论智对该成果的编译。
在机器学习的很多任务中,常见的有根据固定、预先收集好的数据集回答问题。但是在一些应用中,我们没有先验数据,必须自己收集回答问题所需要的数据,例如在环境污染监控和人口普查过程中常出现这种情况。自己收集数据则要求我们将注意力放在最相关的信息源上,但是想确定哪些信息源会得到有用的结果则是很困难的。另外,当实体收集数据时(例如机器人、卫星或人类),我们必须对测量方法进行规划,尽量减少智能体随时间移动所造成的成本增加。我们将这种抽象的问题称为“具身自适应感知(embodied adaptive sensing)”。
针对这一问题,我们提出了新的解决方法,其中机器人必须穿越它所在的环境后确定位置或目标物体。自适应感知涵盖了机器人研究中的很多问题,例如快速定位污染物或放射性资源的泄漏、在搜救中找寻被困者。在这些情况下,设计一种能尽快返回正确结果的感知轨迹是很重要的。
本文我们以放射物泄漏问题(RSS)为例,无人机需要确定环境中k-最大的放射性辐射源,k是用户定义的参数。RSS是自适应感知问题中非常有趣的案例,因为其中会遇到多种复杂的背景噪声(放射源周围有很多放射性物质)。
于是,我们提出了AdaSearch,这是一种用于通用自适应感知问题的连续消除式的框架,我们在放射源寻找的环境下测试它。AdaSearch在环境中的每一点都能将泄漏率控制在置信区间中。利用这些置信区间,算法经过迭代确定了一系列可能泄漏点,最终选出唯一的一个,清除掉其他的。
将具身搜索看作多重假设的测试场景
传统上,机器人领域将具身搜索(embodied search)看作持续的运动计划问题,其中机器人必须平衡环境探索和对高效轨迹的选择。这就催生了既可以进行路线优化,又可以进行环境探索的方法,可以用滚动时域控制(receding horizon control)进行优化。而我们通过假设检验测试,将该问题看作序列最佳动作定义。
在假设检验测试中,它的目标是在多种分散问题上得出结论。给定智能体一系列测量动作N,每个都能根据固定分布生成观察结果。
智能体的目标是学习这些N个观察分布中的预指定特征。例如,我们以向新客户展示产品A或产品B为例,记录他们对该产品的评价,从而表示统计学中的A/B测试。这里的N=2,因为只有两个动作:展示A和展示B。而我们要研究的目标特征就是哪个产品更受欢迎。根据我们收集到的偏好信息,对这些样本以及置信区间进行跟踪记录,分别用置信下限和上限对产品进行定义。随着收集的评价越多,我们对每个产品的偏好估计就越准确。最终可以用一个结论来定义B比A更受欢迎:如果B的置信下限比A的置信上限还要高,那么我们可以认为B比A更受欢迎。
而在环境感知的情况下,每个动作都要从一定位置和方向读取传感器。通常来说,智能体的目标是确定哪个方向能测量出最多的观测信号,或者哪一系列的k动作能得到最大的平均观测。为了这一目标,智能体可能会按顺序选择动作,通过此前的观察选择信息量更多的动作。
乍一看,序列最佳动作确定可能对移动的具身感知智能体来说太抽象了。智能体完全可以不考虑潜在成本随机选择动作。但是,抽象的动作确定是非常强大的。通过精准的统计语言实现具身搜索问题,我们提出了与每种感知动作非常相关,且置信度很高的观察方法,确定了未来要做的一系列动作。
我们提出的AdaSearch用序列最佳动作定义得到的置信区间和全局轨迹规划,实现了渐进最优的测量复杂度,并能有效的分摊运动成本。
放射源寻找
为了验证它的效果,我们会用AdaSearch寻找放射性元素唯一一个泄漏点。我们将环境模拟成一个平面网格,如下所示。其中的红点是放射性元素集中的区域。但是定位这一点非常难,因为传感器会被其他紫色的点(背景辐射)干扰。信息的收集由配有传感器的无人机进行,目标就是设计一个路线,我们能通过传感器收集来的观测信息,尽快定位放射点的位置。
AdaSearch
我们的AdaSearch算法结合了全局收敛计划和自适应感知。在无人机第一次通过网格时,会先均匀地收集环境信息。
第一次观察后,我们能取消一些明显不合适的区域。如果在平均值周围的置信上限小于任何区间的最大下限,该点则会被消除,表示该点不是目标区域。
在下一次探索,AdaSearch会更仔细地搜索剩余点,直到找到目标。
Baseline
我们将AdaSearch和经过相同案例训练的信息最大化方法——InfoMax进行比较。但不幸的是,对于大型空间的搜索,实时计算无法支持路线规划或者参数化。这可能导致算法变得非常贪婪,会花大量时间找寻错误的原因。
为了区分我们的置信区间所带来的影响和全局规划启发法,我们用简单的全局规划方法——NaiveSearch作为第二种baseline。这种方法统一地对网格采样,在每个单元格上都花费同样时间。
结果
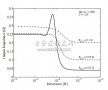
我们在64×64米的网格上,用4米的分辨率实现了三种算法,模拟了放射性源寻找的实例。结果我们观察到,AdaSearch通常比NaiveSearch和InfoMax更快完成。随着不断增加背景辐射的水平,NaiveSearch的运行时间越来越慢,但AdaSearch的变化却不大。
-
机器人
+关注
关注
213文章
31494浏览量
223850 -
无人机
+关注
关注
237文章
11390浏览量
196767 -
智能体
+关注
关注
1文章
574浏览量
11647
原文标题:AdaSearch:用连续消除法实现自适应感知,快速精准定位
文章出处:【微信号:jqr_AI,微信公众号:论智】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
美中联合研制出最小半导体激光器
一种使用邻接信息的自适应肤色检测方法
研究人员开发出一种可监测消化系统和胃部活动的物联网可穿戴系统
研究人员借鉴蟑螂灵活的外骨骼结构,制造出一款机器人雏形



评论