 can总线结构
can总线结构
- Load:0 second
- Duration:0 second
- Size:0x0
- Volume:0%
- Fps:56fps
- Sudio decoded:0 Byte
- Video decoded:0 Byte
CAN总线用户接口简单,编程方便。网络拓扑结构采用总线式结构。这种网络结构简单、成本低,并且采用无源抽头连接,系统可靠性高。通过CAN总线连接各个网络节点,形成多主机控制器局域网(CAN)。信息的传输采用CAN通信协议,通过CAN控制器来完成。
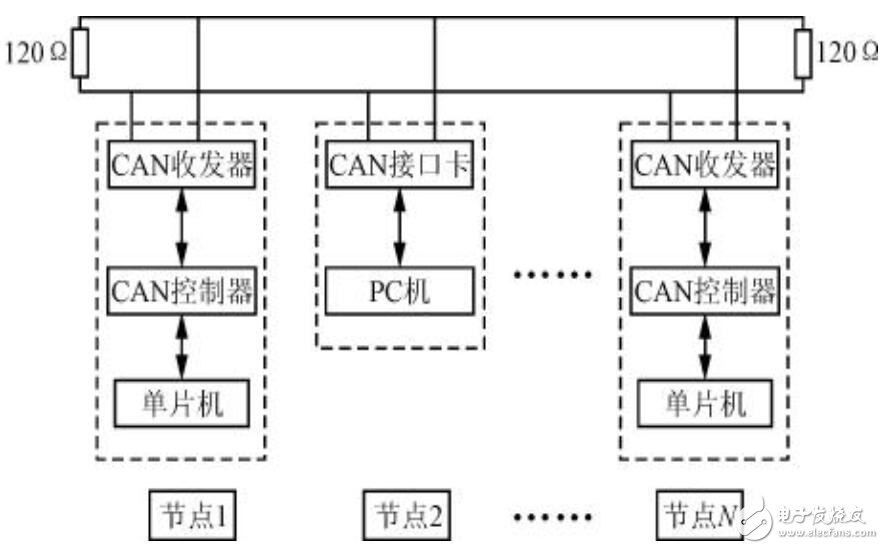
各网络节点一般为带有微控制器的智能节点完成现场的数据采集和基于CAN协议的数据传输,节点可以使用带有在片CAN控制器的微控制器,或选用一般的微控制器加上独立的CAN控制器来完成节点功能。传输介质可采用双绞线、同轴电缆或光纤。如果需要进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间加接光电隔离,电源采用DC-DC变换器等措施。这样可方便构成实时分布式测控系统。微控制器,或选用一般的微控制器加上独立的CAN控制器来完成节点功能。传输介质可采用双绞线、同轴电缆或光纤。如果需要进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间加接光电隔离,电源采用DC-DC变换器等措施。这样可方便构成实时分布式测控系统。
CAN总线的物理层是将ECU(Electronic Control Unit-电子控制单元,又称“行车电脑”、“车载电脑”等)连接至总线的驱动电路。ECU的总数将受限于总线上的电气负荷。物理层定义了物理数据在总线上各节点间的传输过程,主要是连接介质、线路电气特性、数据的编码/解码、位定时和同步的实施标准。理论上,CAN总线上的节点数几乎不受限制,可达到2000个,实际上受电气特性的限制,最多只能接100多个节点。
CAN的数据链路层是其核心内容,其中逻辑链路控制完成过滤、过载通知和管理恢复等功能,媒体访问控制子层完成数据打包/解包、帧编码、媒体访问管理、错误检测、错误信令、应答、串并转换等功能。这些功能都是围绕信息帧传送过程展开的。
-
CAN总线
+关注
关注
145文章
1958浏览量
131213
发布评论请先 登录
相关推荐
CAN总线通信原理介绍 CAN总线模块选择指南
使用CAN总线的注意事项 CAN总线与其他通信协议对比
CAN总线与LIN总线的区别
如何使用Arduino实现CAN总线通信



【CAN总线知识】全面了解CAN总线协议


单片机的三种总线结构
CAN总线控制器是什么意思
CAN总线的数据帧结构
CAN总线几种正常的“异常”波形





 工商网监
工商网监
评论