 通过park变换得到的Id、Iq有什么具体的物理含义?
通过park变换得到的Id、Iq有什么具体的物理含义?
三相对称电流通过向dq坐标轴上投影得到的Id、Iq与通过park变换得到的Id、Iq有什么区别和联系么?
大概翻了下导师让看的张兴的博士论文,里面全都是数学推导,很难直接从式子上联系到其具体问题。最后我翻看电机学和电力系统分析里面涉及到的相关知识,更加弄混淆了。希望能推荐一些其他讲解park变换的前世今生的资料,谢谢。学习过程中还有遇到累死的问题有:1、三相对称电流的相量表示中的投影得到的Id、Iq,我可以认为是分别向两个垂直方向上的投影,得到有功和无功分量。而通过park变换得到的Id、Iq有什么具体的物理含义?我计算一个具体的有关整流器的实例,用上面2种Id得到的有功功率不相等,相差1.414倍的样子。2、看到的park变换的推导,好想都是数学推导,那么它为什么又叫做同步两相旋转坐标变换?同步旋转是什么物理意义?
与相量表示中无法表示出来的角频率w有什么联系么?3、还有clark变换又叫两相静止坐标系,岂不是就是相量表示中的dq坐标轴的投影么?4、最后一个问题,通过park变换将三相对称电流得到的直流量Id、Iq是不是只是单纯为了方便控制系统的设计,其具体的物理含义都是由于数学推导发现各种关系然后赋予的?也就是说是曲线救国的意思?那我是不是可以自己设计一个新的变换方式,得到新的物理量,然后通过控制新的物理量达到控制原来的物理量的目的。新物理量的具体物理含义只是通过我自己设计的变换方式的数学推导赋予的。(之前问过这问题,很杂,很乱,导致很久没人回答,于是我就删了。结果苦了某些大侠给我写的答案无处评论。对不起啦!!)
好久都没有认真回答过专业问题了,今天来一发。电磁换能魔法师要布阵了!希望这个回答给所有没学电机的童鞋一个简单的认识,给正在学电机的童鞋一个帮助,给学过电机的以另一个角度。本答案将不含任何公式,从本质上切入问题。所有的电机原理都如下图(纯Visio手绘,轻拍):
两个灰色的轮子一个是定子,一个是转子。具体哪个做定子,哪个做转子。随意。所有电机的原理都是这么简单!真的只有这么简单,那就是:转动其中一个轮子,另一个轮子就会跟着转。很熟悉啊有木有,就是初中物理的讲的“异性相吸”啊。可是为什么所有教材讲的都接近于玄幻呢?因为——我国教育擅长学而不擅长教……如果能上Youtube或者看看有几位IEEE电机祖师爷写的教材,你就会发现他们写的书真的就跟连环画似的,好亲民……而目前我还没有看到过任何一本能与之等价的中文读物……
言归正传,参考上图,磁铁都紧紧的吸在了一起,凭直觉,如果错开任何一个角度,比如下图:
不稳定啊有木有!有一种如果松手肯定会发生什么的感觉啊有木有。不错!这就是力!力就这么产生了!力乘以距离就是力矩,在这里我们就称之为转矩。如果我用手转动外面的壳,里面的轮子如果能动肯定也会跟着转,这样电机就动起来啦~重要的事情再重复一遍:所有电机的原理都是这样的!就是这么简单!
OK,所有交流电机都是有一个旋转的磁场带动另一个磁场使之旋转~那个旋转的磁场是三相对称电流产生的,这个我想大家都是懂得。如果不懂,那就去看书吧,这一段教材上写的还是蛮形象的。这个发明是意大利的一位物理学家最先提出的,后来被特斯拉发扬光大。接下来的所有例子中,都是外面那个磁铁在转,里面那个轮子跟着动。那么问题来了,从上面的两张图我们能得到一些什么结论呢?1. 磁铁完全对着的时候(如第一张图)电机转不起来,对的太正了好稳定的感觉2. 磁铁错开一点的时候(如第二张图)电机可以转起来3. 磁铁错开太多的时候……貌似力度不够,带不起来4. 磁铁一开始就转的特别快,而另一个转速为零,貌似也转不起来(因为刚被前面的磁铁吸了一下,后面的磁铁就又上来了,又往后吸了一下,前功尽弃的感觉),所以电机就在那一直震啊震
于是,你就会想,如果我想控制里面的转子转的漂亮,我就需要有一套有效的控制外面的磁场的转动的方法,不能太快,不能太慢,要根据里面的情况,循序渐进的转动外面的环环~~这就是电机控制方法。不要看公式复杂成天书,本质上就是这么简单~~
好的,感性认识建立起来了吧~现在,我们来看上面提到过的第3个问题,两个磁铁离得太远不行,离得太近不行,那要成什么位置才会有最大的转矩啊~~~这就是这个问题问的本质,就有了park变换和DQ轴啦~~park变换就是为了进一步探讨空间位置对于力的控制。
控制电机,说到底,控制的是神马?!其实就是力啊有木有,磁铁相对于转动轴的距离是固定的,所以转矩直接正比于磁铁之间的电磁力啊(转矩等于所有力乘以距离,距离都一样)。那么我们谈控制其实就是在控制两个磁铁之间的力。有人会说电机另一个输出量是转速,也许要控制。对,可是转速是表面现象,控制转速是通过控制力来间接实现的。转矩大了自然会转的更快,转矩小了转速不就降下来了嘛~所以归根到底电机控制其实控制的就是电磁力~就是图上显示的几对磁铁之间的力~
那么,这个力跟什么有关呢?前面我们说了,和两个内外磁铁的空间位置有关:两个磁铁错开太少没有力,错开太多了力又不够,貌似角度错开成某个值的时候有一个最大值的感觉。不错,这个结论的得出是在磁铁磁力不变的前提下得到的,如果磁铁的强弱是可以调节的会发生什么?请看下图:
什么!磁铁怎么这么小?再看原来的图片是不是有一种器大活好的怀旧感?凭直觉,上图所示的电机感觉上力量就比原来的电机弱,因为他磁铁小啊,力不从心啊有木有。现实中磁场的强弱就是可调节的,因为外部的旋转磁场是由三相电流产生的啦,所以通过控制正弦电流的幅值你就可以调节磁场的强弱啦~有的同学可能会有一个问题,那么对于永磁电机来说,里面的磁铁是不是应该保持不变呀?没错,这个问题我们放一放,一会再说。
综上,我们得到了一个强有力的结论:要想控制电机转的漂亮,有两个因素要把握好:1. 磁铁磁力的强弱2. 内外磁铁的空间相对位置
可是这两个问题耦合在一起好难分析啊有木有,因为如果磁铁变大但空间错的很开,那电磁力矩是变大了还是变小了啊?如果磁铁变小但是错开的又近了一些,那力矩到底是小了还是大了啊!?有两个因素都在变,很难单独分析哇。于是我们就想,能不能把这两个因素通过一种简单的方法解耦呢?这就是Park变换和DQ轴出现的大背景啦。来看下图:
你看,内部磁铁在空间有一个磁场,外部磁铁会产生一个磁场,说到底,其实力的产生就是和这两个磁场的大小和方向有关系嘛~
所以(敲黑板状),所有电机,注意是所有电机(包括直流电机和任何类型电机),他们的转矩都是正比于内外两个磁场的叉乘(如上图),就是两个磁场矢量围成的平行四边形的面积。如果两个磁铁方向重合(如最开始的第一张图),那么平行四边形的面积就是零,没有力。如果方向错开一点(比如最开始的第二张图),那么就会有力(因为平行四边形面积不为零啦)。上面这个公式(电机转矩正比于转子磁场叉乘定子磁场)是电机学最最最最最本质的公式!我不明白为什么我们的中文教科书都不详细讲这一条!!!!
好,接着唠。平行四边形什么的最有意思啦,因为他可以被拆成矩形啊~七巧板的感觉:
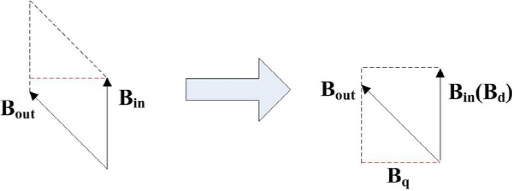
你看,一个平行四边形就这么被拆成矩形啦。为什么这么拆?因为好看啊!你不觉得方方的地砖才是正派么?四边形的地砖都是异端啊。上面两个图形的面积是一样的,所以分析起来不必担心。我们把原来的Bin称之为d轴磁场(d是direct的缩写,意思是直接的;d轴中文翻译为直轴),把新拆出来的垂直于Bin的磁场称之为q轴磁场(q是quadrature的缩写,意思是垂直的、正交的、90度的;q轴中文翻译为交轴)。怎么样,其实这些原理一开始定义的时候是很好记的!很形象的!哪有那么复杂!1929年,帕克还在波士顿的通用电气苦逼的拧螺丝呢,他哪会起什么复杂的名字,完全是为了自己干活好用好嘛~
看!两个磁场,Bd和Bq,他们的面积决定了力的大小!决定了电机的输出转矩!控制这两个值,上面我们分析的所有情况都可以被控制啦!那么磁场是什么产生的?电流产生的。磁场和电流的关系是什么?
磁场=电流×电感
又是高中物理啊……是啊,你工程再复杂,本质上的物理属性就是这么简单……所以帕克就说啦,把电机现实中的三相电感如果能转换成DQ轴的两相电感,世界就美好了啊。因为电流我可以测出来,我只要知道了DQ轴电感,那我就知道了两个磁场啦,然后我就又知道力啦,然后我就知道了转矩啦,然后我就可以通过改变电流控制转矩啦,然后我就可以通过转矩控制转速啦!有一种征服了全世界的感觉啊有木有。
回来了,继续答题。普通青年的思路就像刚才说的这样,有这么一条链条:电流 → 磁场 → 力 → 转矩 → 速度所以我们通过控制电流的D轴分量和Q轴分量就能控制矩形的两条边:Bd和Bq的大小啦,他们相乘就是转矩啊~ 通过速度和(或)位置反馈,我们就能够有效的控制外面的环环使之带动里面的轮子转起来啦。DQ两个分量合成的其实是一个矢量,于是乎这种方法就叫做矢量控制(Vector Control),也有人称之为FOC(Field Oriented Control),一回事。这种普通青年的正常思路是1970年前后由达姆施塔特工业大学和西门子工程师提出的。
二逼青年可能会这么问:上面那个链条好繁琐,特别是在电流推磁场的过程中,要用到派克变换,那矩阵太美都不敢看,难道就木有简单的办法吗?有同学可能就会说,为什么不用一个磁场传感器直接测量磁场呢?这样一来我们不就直接知道了磁场的位置和方向了嘛~~ 原则上来说确实是这样的,可是!!电机内部气隙太小,没法安装啊衰。平时大家是怎么测量电机内部磁场的呢?有些人用一根导线在某个定子的齿(tooth)上缠几圈,直接测量感应出来的电压不就好啦,因为电压就是磁场的微分呀。这时候,两个文艺青年站出来了,说:“给你们厉害的,定子绕组本身就是一个传感器呀”。众人仿佛发现了什么,一阵蛋疼,纷纷晕倒:“卧槽!我们为什么就没有想到!!!!”原来,定子电压直接积分不就是磁通嘛……没办法,晚一步就是晚一步,那两个文艺青年将这种方法注册了专利:直接转矩控制(DTC),众人再次晕倒。后来ABB公司直接买断了这份专利,众人纷纷散场:“算了,还是用矢量控制吧”。
于是,西门子和ABB两大巨头的带领下,电机控制分为了剑宗和气宗,哦不对,是矢量控制和直接转矩控制的阵营。矢量控制要走一个长长的链条,所以计算量大。直接转矩控制简单有效,可惜被买断了……于是众人只能继续用矢量控制……
看到这里,基本上就明白了DQ轴和帕克变换了吧~我们的特别多的中文教材和很多教授(甚至诸多老教授)喜欢把DQ变换说成“把交流电机变换为直流电机分析”的过程,其实这个类比很容易把学生给带迷糊了,尤其是第一次连直流电机都没弄特别清楚的新生。DQ变换之后的磁场分析和直流电机的磁场可完全不是一个问题,只能类比,只能说长得像,千万不能直接套着用。
又是新的一天,继续更新。其实以上基本上能够讲明白DQ轴的由来,电机基本原理和电机控制的基本原理。如果你想了解到这里,以上足够了。以下将深入一些,涉及到异步、永磁电机的差异,弱磁控制的本质原因和电动汽车电机的自身特点等问题,都是比较热门的问题,不过原理上还是比较简单的。
就像上面说的,电机转动的本质原因是转子磁场和定子磁场的相互作用,再说白一点,就是一个磁铁吸着另一个磁铁,使得另一个磁铁所在的转动件转圈:
这样的话就需要两个磁铁,一个主动旋转的磁铁,一个被动被吸附的磁铁。主动旋转的磁铁我们知道是三相对称电流所产生的旋转磁场。那么被动吸附磁铁是谁?对于同步电机来说,被动吸附的磁铁是镶嵌在转子上的永磁体或他励线圈产生的“人造永磁体”;对于异步电机来说好像没有被吸附的永磁铁啊。对,因为异步电机被吸附的永磁体也是旋转磁场产生的。纳尼?理解不能啊!不要着急,异步电机的转子是个鼠笼,他经历了一些奇妙的事情:
外面旋转磁场旋转 → 切割了鼠笼的金属导体 → 金属导体产生了电动势 → 由于鼠笼短接所以金属导体就产生了感应电流 → 感应电流产生了一个磁场(转子磁场)
所以,对于异步电机来说,他的“被吸附的永磁体”就这么产生了!异步电机的“被吸附磁体”是自己感应出来的!所以异步电机(Asynchronous Motor)的英文名叫做感应电机(Induction Motor)。好像有点熟悉?没错,这不就是个变压器嘛~~ 原边产生了一个磁场然后副边感应了一个电流啊,电能就这么传输过去了。只不过普通的变压器是静态的,这个变压器是会动的!也就是说这个变压器的铁芯不是一整块,而是两块拼起来的,所以副边缠绕的那块铁芯就跟着原边缠绕的那块铁芯转起来啦。正因为这样,异步电机的等效电路图其实就是一个变压器,只不过二次侧的有效电阻是一个和转差率相关的动态元件。
如果你还是对异步电机的内外磁铁不能够明白,我就再放一个实际中的异步电机定子转子磁场分布图:
那些线条是磁力线,定子的磁场和转子的磁场形成了一个角度,其实就相当于两个磁铁了,跟前面演示的磁铁图没有任何区别。
这样一来,两种电机的原理基本上就能够理清啦。
终于回来了,继续更新。今天主要说感应电机和永磁电机的磁场控制区别。再次复习一下重点:电机转矩正比于转子磁场和定子磁场的叉乘,即等价于转子磁场和定子磁场围成的平行四边形的面积,亦正比于DQ轴磁场围成的矩形面积。无论是感应电机还是永磁电机,控制转矩都是通过控制DQ矩形面积来实现的,这一点我们前面说过。可是,由于感应电机和永磁电机的构造有区别,他们的磁场控制策略也是有区别的。这一点尤其重要,因为感应电机和永磁电机是现在工业中应用最最广泛的两种电机。这两种电机就像交流电和直流电一样,就像直接转矩控制和矢量控制一样,几乎平分了市场,各有优缺点。无论你面试特斯拉,福特还是通用、丰田全电动或混动部,这道面试题是肯定躲不过的。目前所有混合动力汽车的电机都是无刷永磁电机,而目前纯电动车的电机主要是感应电机(因为纯电动特斯拉占了很大比例,而特斯拉全部都是感应电机)。
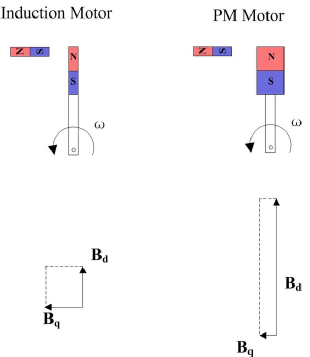
对于感应电机来说,转子磁场和定子磁场都是由三相电流来决定的,因为感应电机的转子磁场是感应出来的嘛;而对于永磁电机来说,转子磁场有相当一部分是由镶嵌的永磁体决定的,而且这部分磁场是几乎不变的。对于感应电机来说,转子磁场和定子磁场都可以灵活自如的调节;而对于永磁电机来说,转子磁场的相当一部分是改变不了的(永磁体产生的磁场是恒定不变的)。通俗点讲就是:感应电机的两个磁铁都可以变大变小;而永磁电机的转子侧磁铁基本上改变不了。如下图:
上图中我已经将磁场分解成了垂直的两个磁铁啦,其实和前面斜着摆的是一回事。这两个磁铁就分别是总的DQ轴的磁场啦。由于已经分解了,那么这两个磁场总是垂直的嘛,看,这下干活是不是方便多啦。感觉上是不是感应电机的劲儿大一些呢?因为人家磁铁好大的感觉哈。对,如果真的是按图中所画那样,这个感应电机的功率确实比下面的永磁电机高。所以大家现在还在研究新的永磁体好让图中永磁的转子侧那块的磁铁再大一些嘛~
对于感应电机来说,两个磁铁就像是大圣的如意金箍棒,要大便都大,要小便都小,所以很灵活呀有木有!但是控制起来很麻烦,因为两边都要操心,累啊!但是真的灵活啊,特别是有了电力电子技术,那开关啪啪啪,一秒钟就能啪几千次,控制的超级精确呀有木有,所以控制这一块也还好,并没有那么夸张啦。
对于永磁电机来说,转子磁铁就是一坨安安静静的永磁体,人家基本上是固定的,而我只要变动Q轴磁场就可以轻松的实现控制,简单省心,尤其是启动的时候,哎妈呀,那真是简单有效(一会会讲)。但是还是我的那句话,有利就有弊,正是因为永磁体的磁场不变性,给后来的控制引入了大麻烦了。
启动的时候,看下图:
从上图看来,感应电机的磁场是两条边同时长的,而永磁电机呢?人家转子侧本来就有很牛逼的永磁磁场,所以只需要一个Q边就可以围出来一个大大的面积。上面两个矩形的面积是一样的,可是样子却完全不同的。这意味着,此时两种电机的力矩虽然相同,可是消耗的电流不一样呀。感应电机的两个磁场都要由电流提供,而永磁电机只需要电流提供一个Q轴磁场就可以啦。所以在启动的时候,永磁电机的效率狂甩感应电机几条街啊。没办法,什么叫做天生条件好,你懂了吧,天生大长腿,自然跑的美。但是这个天生的优势在弱磁控制中却成了永磁电机的致命弱点。这部分下次再更。
回来啦!今天我们讲解弱磁控制!这个问题是电机的高阶领悟!能修炼到这一层接触这个问题,说明你已经很厉害啦,这意味着你已经是研究生以上学历的电气工程学者或者是资深工程师啦。什么是弱磁控制?英文名字叫做 Flux-Weakening Control,直译是“弱磁控制”,但我们有些中文学者将这个翻译成了:“弱磁扩速”!我觉得这个翻译简直神了~~ 因为弱磁控制就是为了扩速~汉语的博大精深终于体现出来啦。扩速,就是扩展速度,把电机的运行速度继续向上提。比如,这台电机的额定速度是3000转/分,我想提到5000转或7000转,怎么办?继续加电压?绝缘会击穿吧~ 继续加电流?貌似和加电压是一回事呀~ 那怎么办?这就是弱磁控制,这是一个“电机到达额定转速之后继续扩速改怎么办”的问题。有没有办法呢?有的。当然一开始是没有的,一开始没有电力电子技术的时候这种事情想都不敢想,继续加电压会电弧闪闪放光芒的。后来有了电力电子技术,弱磁扩速才慢慢出现了。
正式开讲弱磁控制之前,我先帮大家回忆一下电机的转矩-速度曲线,这个很经典:
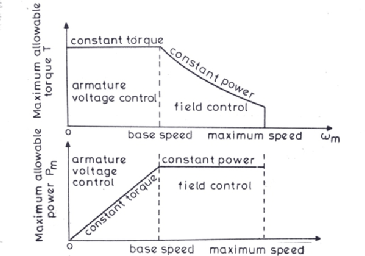
上图第一张图是转矩-转速曲线,第二张图是功率-转速曲线。上电机课程的时候,老师都会讲:电机有两个状态:一开始是恒转矩,后来是恒功率。但是有些倒霉老师不讲为什么,坑爹啊……我来告诉为什么,还是因为一个高中物理公式:
功率=转矩×转速
一开始,电机以最大转矩运行,以最快的方式把电机的速度带上来。这个过程被称为恒转矩控制。这个过程中,功率从零慢慢增大,就是我前面说的“循序渐进”的启动过程。但是力量是一直保持不变的。有些同学会问,为什么这个时候不是保持最大功率呢?因为这时候转速很低啊,要是保持最大功率,参考上面的公式,你觉得你出的力的多大啊骚年。臣妾力量不足啊。所以这个时候功率慢慢长上来是比较合理的。电机说:我功率有最大值,转矩也有最大值,超过哪个我都吃不消啊。这个过程也可以借助于磁铁来描述:一开始两个磁铁都是最大的,力最大嘛。可是这时候功率不是最大的哟。力和功率这两个量的关系很容易把人带迷糊。我下面还会详细说。
后来,功率到达最大值,臣妾已无余力继续用力了,这时候电机保持着这个功率,减小转矩,但是速度却上来了。这个过程就是恒功率调速。这个过程中,电压电流不变所以功率不变,但是正弦电流的频率慢慢增长。由于磁通正比于电压除以转速,所以随着转速的提升,磁通也就下降了。正因为如此,这个过程也被称为弱磁控制。因为磁场变弱了嘛。简而言之就是:磁铁变小了。
什么?磁铁变小了反而转的快了?不符合常理啊?平时不都是力气越大跑的越快么?怎么磁铁小了力气变小了反而速度上去了呢?想不通啊!!
如果你有这个疑问,那么你和我当初一样,也把“力”和“功率”两个概念给弄混啦~力是改变物体运动的原因而不是维持物体运动的原因。力和速度有关系,也没有关系,这个得看具体情况。一个物体不受外力,照样可以保持匀速直线运动(牛顿第一定律)。而功率是能量的表现,这个和力是有区别的。磁铁小了,力是变小了,可是速度变大了,那什么变小了?加速度变小了!!这意味着物体速度的增长量变小了!这说明速度长得没那么快了!但是速度还是长的!!这下你明白了吧?为什么磁铁小了转速变快了?对,平时我们感觉力越大跑的越快,没错。可是那时启动的时候,那是恒转矩控制的区域。后来到了恒功率区,这个感觉是平时人类不太能有的,所以这时候注意体会。就像你把卫星扔到了轨道上,卫星具有速度之后就不需要再用燃料维持速度啦。记住,和力有关的是加速度,而不是速度~
这时候,磁通慢慢变小,等效看来就是磁铁变小了,速度上来了。OK,这就是弱磁控制。说起来简单,做起来还是不容易的。对于感应电机来说,前面我们说过,他的两个磁铁就是两个如意金箍棒啊~能大能小,所以要求感应电机做弱磁控制炒鸡简单啊有木有。可是永磁电机怎么办?D轴磁场相当一部分是永磁体的,改变不了啊亲。于是平时我们说的弱磁控制主要是针对永磁电机来说的,因为他的那个永磁铁磁场小不了啊!
这时候,有一些二逼青年说,既然转子磁场不能变,那就干脆让定子磁场注入一个和转子磁场相反的磁场,使得整个合成磁场的D轴净磁场值减小。呵呵哒,能行么?是不是觉得很作弊啊?没办法,工程学从来都是这样的,看似很作弊,实际用起来还行……所以这就是永磁电机的弱磁控制本质:注入一个和D轴相反的磁场使之合成磁场弱磁。(评论里有人问Id增大为什么转矩减小,我这里算是回答你了。Id增大,但是方向是和永磁方向相反的,所以合成的磁场是减小的,矩形面积是减小的)。由于注入了相反的磁场使得相当一部分电流做起了无用功,所以在弱磁方面,永磁电机的效率比异步电机要低。
-
整流器
+关注
关注
28文章
1527浏览量
92408 -
电机
+关注
关注
142文章
9003浏览量
145357
原文标题:分享一篇”之乎“上关于FOC的讲解------通俗易懂
文章出处:【微信号:gh_dae0718828df,微信公众号:gh_dae0718828df】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
PMSM 电流反馈不稳定是为什么?
PMSM矢量控制,电流(Id和Iq闭环)单闭环时,IPARK和park中的电角度是不是只能用函数生成的电角度?
三相电流坐标系到dq坐标系推导求教
为什么MCM_Park和MCM_Rev_Park使用非标准方程式?
电机控制中Park变换和逆变换角度如何计算?
电机FOC中的CLARK变换和PARK变换(公式推导+仿真+C语言实现)
基于STM32电机控制的SDK,CUBMX等配置FOC代码生成讲解
深入浅出讲解FOC算法与SVPWM技术
一文解析Park变换和Clark变换
stm32 FOC从零学习开发(一)FOC概念
simulink电机仿真学习之park变换






 工商网监
工商网监
评论