 特斯拉公布最新全自动驾驶专利
特斯拉公布最新全自动驾驶专利

特斯拉最近公布了一项用于全自动驾驶汽车的专利,该技术可以利用其他车辆共享的GNSS数据为自动驾驶汽车定位,能够在GPS信号弱的地方提高定位精度。
特斯拉目前正全力开发全自动驾驶套件,这家电动汽车制造商开发了一种软件,可以将其他车辆用作地球上的GPS卫星,该系统在一些GPS信号受损的地区,提高了特斯拉车队的定位精度。
特斯拉在其专利背景中指出,虽然来自太空卫星的GPS信号非常宝贵,但卫星位置,信号阻塞,电离层扰动和大气条件等因素可能会影响GPS接收机的精度。考虑到这一点,需要开发一种能极大地提高定位精度的系统,将它应用到全自动驾驶车辆中。
特斯拉总是让人意想不到,在最近公布的专利中,提出了一个相当聪明的解决方案。该专利文件名为“车辆定位技术”,描述了一种允许车辆相互发送信号和定位数据的软件。这使得汽车的功能与地球上的GPS卫星非常相似,可以将定位信息提供给路上的其他车辆,共享其原始GNSS数据,以便车辆可以通过差分或其他计算来消除误差。特斯拉在其专利中指出,该软件具有灵活性,能够通过至少一种网络协议进行操作,如以太网,传输控制协议(TCP)/互联网协议(IP)等。
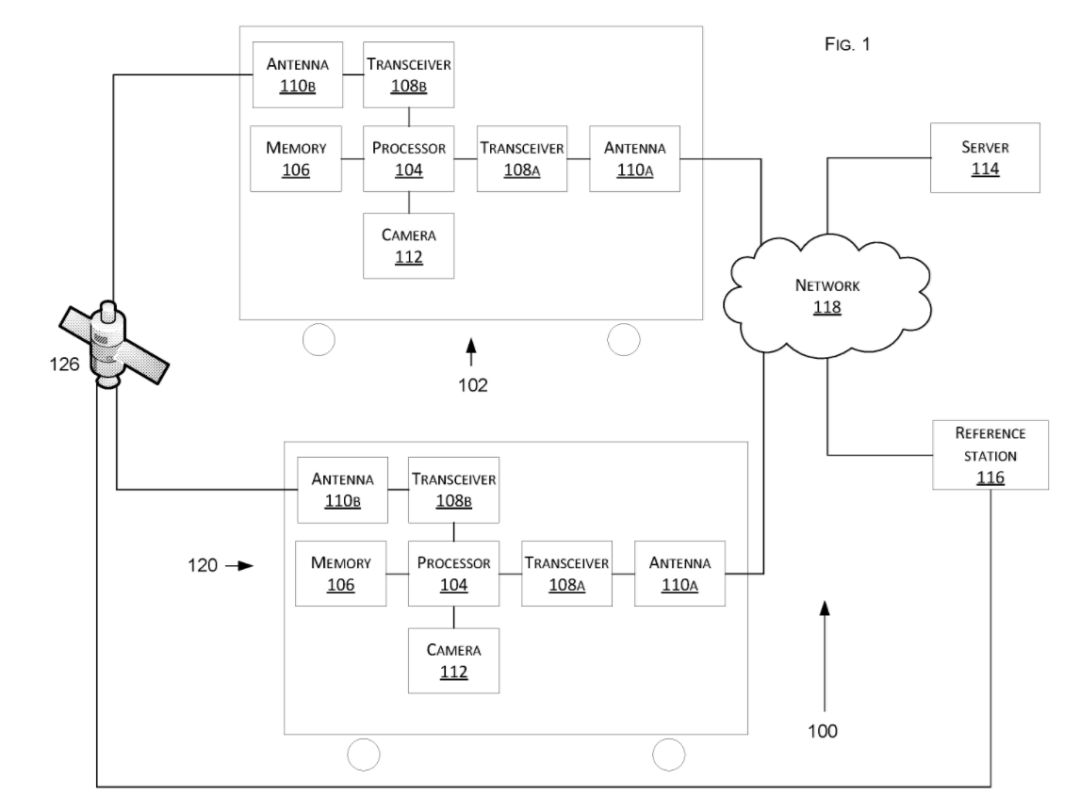
这样的系统将使特斯拉的车队,特别是那些配备全自动驾驶硬件的车辆能够在GPS信号天然弱的区域导航。根据该专利的描述,该系统设计用于个人和整个车队,因为它利用了车辆传感器套件的功能,包括摄像头,雷达,超声波和类似技术。
这种提高定位精度的发明,通过确定车辆偏移量并以各种方式传递偏移,或者通过在多个设备之间共享原始定位数据,来增加这种定位精度,其中至少一个设备足够准确地知道其位置,以用于差分算法。
特斯拉的专利还清楚地表明,正在开发的GPS定位软件也可以在由传统汽车制造商和竞争对手的初创EV公司生产的汽车上运行。
以下是专利中的几个要点:
该系统的电源可以是可充电的电池,也可以是内燃机。在内燃机模式下,动力源包括通过底盘托架并连接到内燃机的燃料箱。电源耦合到驱动源,从而依靠驱动源来驱动。
处理器可以用数字信号处理(DSP),机器学习和其他相关技术来编程,例如通过使用存储器中的代码,能够从各种噪声水平中提取有用信息。在一些实例中,除了无线电波之外的雷达,也包括激光雷达等数字信号都可以处理。
特斯拉对内燃机和配备有激光雷达的车辆的参考可能在该公司的专利中看起来有点不合适。毕竟,特斯拉不生产燃烧化石燃料的汽车。首席执行官埃隆·马斯克(Elon Musk)也在公开的立场,反对使用激光雷达来开发全自动驾驶系统。那么,特斯拉在其专利中提到这两个细节的原因可能是什么呢?
一方面,特斯拉之所以在专利中提到烧油的汽车和装有激光雷达的汽车,是为了突出其技术无限制的想法。因此,虽然特斯拉可能最终决定不与其竞争对手的汽车制造商分享其GPS定位技术,但该公司仍然坚持其技术实际可行的事实。
另一方面,特斯拉专利中概述的软件,也会成为公司用于特斯拉网络的组件之一,为即将推出的搭乘系统做准备。特斯拉网络仅通过自动驾驶车辆进行操作,需要超精确的GPS数据才能最佳地工作,利用一些其他车辆的优势数据为自己作定位,才能更安全的实现全自动驾驶。因此,像特斯拉最近的GPS定位专利这样的系统无疑是非常宝贵的。
-
特斯拉
+关注
关注
66文章
6420浏览量
131499 -
自动驾驶
+关注
关注
794文章
14987浏览量
181486
原文标题:特斯拉全自动驾驶专利丨用其他车辆作为地球GPS卫星为无人车定位
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
特斯拉AI5芯片流片成功:自动驾驶与人形机器人迎来算力革命
为什么自动驾驶方案不再强调地图了?

如何构建适合自动驾驶的世界模型?

自动驾驶汽车如何实现自动驾驶

如何设计好自动驾驶ODD?

不同等级的自动驾驶技术要求上有何不同?
一文读懂特斯拉自动驾驶FSD从辅助到端到端的演进

自动驾驶达到什么技术标准才能称为L3级?
卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

今日看点丨特斯拉首辆全自动驾驶汽车将交付!;苹果首次承认Siri架构落后,新版本推迟至2026年
自动驾驶安全基石:ODD
新能源车软件单元测试深度解析:自动驾驶系统视角




评论