 基于新一代数字信号处理技术的新型电机控制方案
基于新一代数字信号处理技术的新型电机控制方案
面向电机和功率级动态特性的高级建模技术可以大幅提高电机控制效率,确保根据系统行为的实时变动实行精密控制。通过无传感器矢量控制技术,设计人员可以增强电机系统的性能,降低功耗,并且符合旨在提高能效的新法规要求。
在过去十年中,随着永磁体材料的不断发展和勘测到的资源越来越容易开采,采用永磁体同步电机(PMSM)的工业应用高性能变速电机越来越多。使用PMSM驱动的先天优势包括:高扭矩重量比、高功率因数、响应更快、结实耐用的构造、易于维护、易于控制以及高效率。高性能速度和/或位置控制要求准确判定转轴位置和速度,使相位激励脉冲与转子位置同步。 因而电机轴上需安装绝对编码器和磁性旋转变压器等速度和位置传感器。然而,在大多数应用中,这些传感器会带来多种弊端,例如:可靠性递减,易受噪声影响,成本和重量增加,以及驱动系统更复杂等。无传感器矢量控制则不需要速度/位置传感器,因而这些问题也就不复存在。
近年来,关于PMSM的无传感器速度和位置控制方法,研究文献中提出多种解决方案。 针对PMSM驱动的无传感器转子位置估计,已开发出三种基本技术:
• 基于反电动势(BEMF)估计的各种技术• 基于状态观测器和扩展卡尔曼滤波器(EKF)的技术• 基于实时电机建模的其他技术
反电动势技术
基于反电动势技术的位置估计根据电压和电流估计磁通量和速度。在较低速度范围内,这种技术对定子电阻特别敏感。由于机器的反电动势很小,并且开关设备的非线性特征会产生系统噪声,因此很难得到关于机器终端的实际电压信息。在中高速范围内,利用反电动势方法可以获得较好的位置估计,但在低速范围内则不行。
反电动势电压的幅度与转子转速成比例,因此静止时无法估计初始位置。所以,从未知转子位置启动可能伴随着暂时反向旋转,或者可能导致启动故障。EKF能够对随机噪声环境中的非线性系统执行状态估计,因而对于PMSM的速度和转子位置估计,似乎是可行且具计算效率的候选方法。
基于空间显著性跟踪的技术利用磁显著性,适合零速工作,可以估计初始转子位置,而不会受其它参数影响。针对初始转子位置,主要有两种基本方法,分别基于脉冲信号注入和正弦载波信号注入。
我们看一个例子。
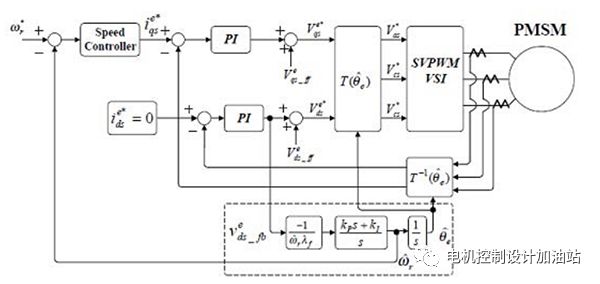
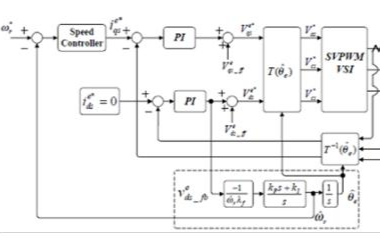
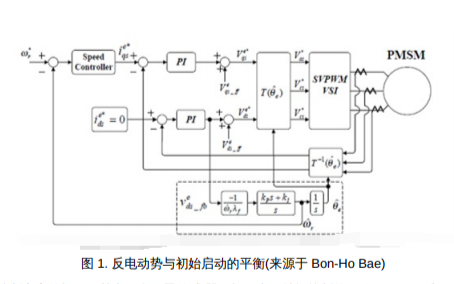
图1. 反电动势与初始启动的平衡(来源于Bon-Ho Bae)
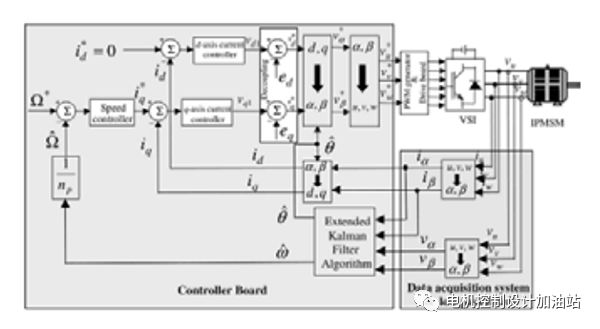
图1为无传感器矢量控制方案的框图,其中不含位置传感器。框图中,轴间控制的正馈项Vds_和Vqs_可以表示为:
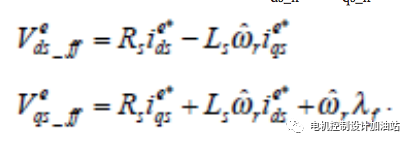
其中,ωr为转子的转速。只看内置式PMSM (IPMSM)的标准电压公式,坐标系可以表示为:
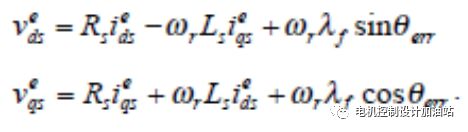
其中,θerr为实际角度与估计角度之间的差值。现在重新定位d轴,可以得到:

假定电流PI调整器将产生小误差,θerr很小,d轴可以表示为:
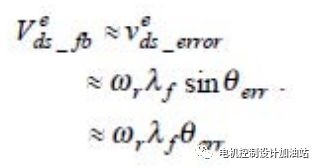
在图1的建议估计器及所导出的公式中,误差信号Vds_error由PI补偿器处理,以导出转子的转速,而转子的角度则通过对估计的速度进行积分而算得。其它常见方法用微分法计算速度,但这会使系统易受噪声影响。Bon-Ho Bae的实验研究表明,建议估计器能够为应用提供非常准确且可靠的速度信息。但在零速和低速时,反电动势电压不够高,无法用于所建议的矢量控制。因此,对于从零速度开始的无缝操作,估计器利用恒定幅度和预定模式频率来控制电流。这里,同步坐标系的角度通过对频率进行积分而导出(初始启动方法)。
EKF技术
我们现在看另一个利用EKF技术原理的例子(来源于Mohamed Boussak),并且同样与初始启动相结合。
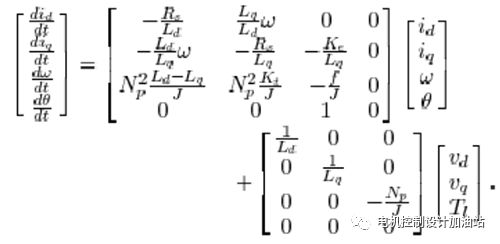
从PMSM的基本公式开始,将其重写为四阶动态模型:

其中:

PMSM所产生的扭矩为:

动态模型基于一些简单的假设,忽略正弦反电动势和涡电流,于是可以得到:
由于d轴和q轴之间存在交叉耦合效应,如图2所示,因此两个轴的电流无法由电压Vd和Vq独立控制。为实现高性能速度控制,需要运用具有去耦正馈补偿功能的d轴和q轴电流调整器。更多信息请参考图3。
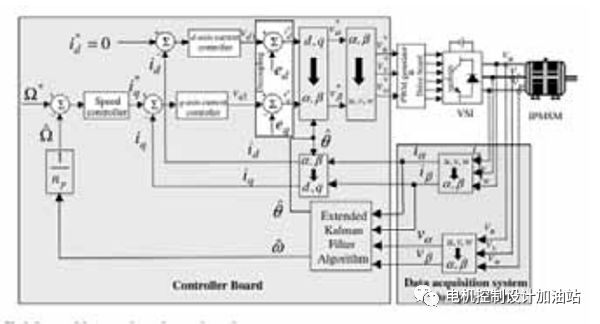
为使IPMSM的扭矩电流比最大,d轴基准电流i*d设置为0。q轴基准电流i*q从速度调整器的速度误差获得,如图3所示。电流调整器的输出提供旋转坐标系的基准电压。在图3所示的框图中,用于去耦控制的正馈项ed和eq由下式给出:
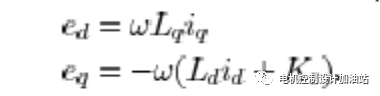
正如Boussak所述,两个补偿机制(电流控制和电压命令)对于确保稳定和最优控制十分重要,有助于增强矢量控制和弱磁控制。
EKF以其简单、最佳、易控制和稳定可靠,成为应用最广泛的非线性系统跟踪和估计方法之一。为实现对凸极IPMSM的无传感器控制,可以利用EKF估计速度和转子位置。电机的线路电压和负载扭矩均为系统矢量输入变量。速度和转子位置是需要估计的两个幅度,二者与电机电流一起构成状态矢量。电机电流将是构成输出矢量的唯一可观测幅度。要对无传感器IPMSM驱动实施EKF技术,双轴坐标系的选择至关重要。最佳选择是采用转子上安装的d轴和q轴旋转坐标系。但估计器的输入矢量(电流和电压)取决于转子位置,所以这种方案与IPMSM无传感器速度控制不兼容。实施过程中可观察到,转子初始位置的估计误差可能会将误差引入EFK相对于实际系统的处理过程中,从而引起严重后果。
对于这种情况,Boussak建议在转子坐标系中调准IPMSM控制。速度和位置仅利用定子电压和电流测量结果来估计。基于EKF的观测器所使用的电机模型含有安装于定子框架上的固定坐标系α-β,因此独立于转子位置。导出IPMSM在固定坐标系中的非线性动态模型,以完成估计器公式:
两个定子电流、电机速度和位置用作系统状态变量(更高级计算方案请参考Boussak的论文)。
诸如Bon-Ho Bae和Boussak所开发的部署方法,利用无传感器控制器的可行性将更高级模型引入实时电机控制方案。
过去5年来,微控制器和DSP制造商一直积极通过新型嵌入式处理器提供足够的性能和必要的功能, 这是确保设计人员将现代矢量控制运用于实际的关键因素。
电机效率始于处理器
如今,像ADI公司的最新ADSP-CM40x ARM Cortex-M4系列等增强型处理器正在将性价比提升到新的水平,使得更复杂电机控制算法的实施开始受到大规模应用解决方案的青眯。尤其在处理器能力方面——内置数字滤波器功能、高性能浮点能力和扩展数学运算能力等都支持更复杂、集成度更高的算法,以便提供更佳的控制器和控制方案,迫使电机驱动的效率接近100%。在工业领域,对运行实时模型估计器的多观测器模型的改善,无疑将有助于增强:(i)驱动性能,(ii)系统效率和拓扑结构,以及(iii)设计的部署方法。就第(iii)方面而言,MATLAB/Simulink®等图形系统便能够简化设计流程,促进新算法的开发。这些工具与执行处理器相结合,能够实现更为复杂的部署方案。与内核速度、模数转换精度和存储器集成有关的处理器级改善将使设计人员能够实现更高的质量和性能目标,同时加速产品上市。
ADI公司最近推出ADSP-CM40x系列混合信号嵌入式控制器,不仅大幅提升了处理器性能,而且降低了价格,使得以前采用性能受限的处理器和微控制器的电机控制应用也能享用DSP水平的性能。借助这种处理性能,电机系统设计人员可以利用更先进的算法实现更强的系统功能和更高精度,精确判定转轴位置和速度,这样系统就无需位置和速度传感器。
用于加速算法处理的闪存,二者均有利于减少片外器件并降低系统整体成本。这些处理器提供性能与片内集成度的最佳融合,使得设计人员能够实现许多系统级设计目标,例如:实时处理更多数据,延时更短,将处理任务集中于单个处理器进行,以及更灵活地优化系统接口和控制能力。如今,新技术正在推动电机系统能力实现范式转换,设计拓扑结构与处理器特性平衡则可实现更高的整体系统性能和效率。高性能处理器/DSP支持运用现代高效控制理论完成高级系统建模,从而确保所有实时电机系统都能实现最佳电源和控制效率。无传感器矢量控制的广泛应用势在必行,必将加速全球提高工业设备能效和性能的进程。
-
传感器
+关注
关注
2551文章
51099浏览量
753572 -
电机控制
+关注
关注
3534文章
1879浏览量
268818
原文标题:面向高效电机控制的无传感器矢 量控制技术继续发展
文章出处:【微信号:motorcontrol365,微信公众号:电机控制设计加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
M 系列DAQ 设备—新一代数据采集标准常见问题解答
基于UCD3138的高整合度新一代数字电源方案
DSP数字信号处理简述
新一代数字信号处理器—TMS320C6201
新一代数字RF信号分析和信号仿真系统测试
Octasic公司推出第二代数字信号处理器内核
支持新一代工业检查系统的多核DSP
面向高效电机控制的无传感器矢量控制技术继续发展
面向高效电机控制的无传感器矢量控制技术继续发展






 工商网监
工商网监
评论