 盘点工业机器人史上那些重要的第一次
盘点工业机器人史上那些重要的第一次
从公元前1400年巴比伦人发明的历史上最早的机械设备之一——漏壶,到近代的阿波罗登月,火星实地考察。人类经历了一个又一个科技上的技术爆炸,而我们工业机器人领域也经历了数十载的不断更新迭代才变得日益完善。那么在这些科技的创新中,有哪些属于我们工业机器人里程碑式的事件呢?
1956年:第一家机器人公司
乔治·德沃尔和约瑟夫·英格伯格(Joseph Engelberger)创立了世界第一家机器人公司尤尼梅申(Unimation)。上世纪60年代,该公司被联合柴油机电气公司(Condec Corporation)收购。后来,联合柴油机电气公司的部分产业被工业制造巨头伊顿电气集团(Eaton)买下。
1959年:第一台工业机器人
乔治·德沃尔(George Devol)和约瑟夫·英格伯格(Joseph Engelberger)开发出第一台工业机器人。
这台工业机器人鼻祖重达2吨,由磁鼓上的一个程序控制,采用液压致动和关节坐标编程。精确度控制在1/10,000英寸之内。
1961年:第一台机器人的生产线应用
新泽西首府特伦顿,世界第一台工业机器人安装运行于通用汽车生产线,用以生产车门、车窗把手,变速杆手球,光源组件以及其他汽车内饰硬件。遵从存储于磁鼓上的步进指令,这台尤尼梅特(Unimate)机器人4000磅重的机械臂可以依次堆叠热压铸金属件。值得一提的是,其制造成本为65,000美元,但Unimation公司仅以18,000美元将其出售。
1966年:第一台移动机器人
斯坦福大学人工智能研究中心(The Artificial Intelligence Center at the Stanford Research Center)开始了谢克机器人(Shake The Robot)的研发工作,这是第一台移动机器人,它被赋予了有限的观察和环境建模能力,控制它的计算机要填满整个房间。
1970年:第一台全自动智能机器人
日本日立公司(Hitachi)发明出第一款基于视觉的全自动智能机器人,它可以根据平面图组装组件。
1996年:第一台个人计算机的机器人控制系统
德国库卡公司(KUKA)开发出第一台基于个人计算机的机器人控制系统。该机器人控制系统配置有一个集成的6D鼠标的控制面板,操纵鼠标,便可实时控制机械手臂的运动。
1998年:当时唯一的弧形轨道龙门吊和传输系统
瑞士Güdel公司开发出“roboLoop”系统,这是当时世界上唯一的弧形轨道龙门吊和传输系统。RoboLoop概念使一个或多个搬运机器人能够在一个封闭的系统内沿着弧形轨道循环操作,从而为工厂自动化创造了可能。
2003年:第一台娱乐机器人
德国库卡公司(KUKA)开发出第一台娱乐机器人Robocoaster。库卡是第一个使人与机器人实现密切接触的机器人制造商,Robocoaster机器人允许乘客坐在其内部在空中旋转,这是现代游乐园空中旋转机器的最初原型。
2005年:重要的奖项设立
机器人与自动化的发明与创业奖(Invention and Entrepreneurship in Robotics and Automation Award,IERA Award)设立。2005年,IEEE机器人与自动化学会(IEEE/ RAS)和国际机器人联合会(IFR)同意共同赞助设立机器人与自动化的发明与创业奖(IERA Award)。设立IERA Award的目的在于表彰机器人领域的突出成就,凡是有创新理念的发明者及将这些理念转化为世界级先进产品的企业都可以申请此奖项。同时,IERA Award还鼓励机器人科学和机器人产业之间的合作。
2006年:第一台无线示教器
柯马公司在意大利推出首款无线示教器(WiTP),执行全部传统的数据通讯和机器人编程活动时,不受连接控制单元线缆所造成的限制,与此同时还确保了绝对安全。
2009年:当时世界上最小的多用途机器人
瑞典ABB公司推出了世界上最小的多用途工业机器人IRB120。IRB 120是ABB机器人部于2009年9月推出的最小机器人和速度最快的六轴机器人,是由ABB(中国)机器人研发团队首次自主研发的一款新型机器人。IRB120仅重25公斤,荷重3公斤(垂直腕为4公斤),工作范围达580毫米,IRB120的问世使ABB新型第四代机器人产品系列得到进一步延伸,其卓越的经济性与可靠性,具有低投资、高产出的优势。
2010年:第一次完整的安全控制器整合进单个控制系统
德国库卡(kuka)公司推出搭载了KR C4控制器的新一代Quantec系列架装式机器人。Quantec K系列机器人具备超低基座,实施卸载应用时下探幅度更大,而新型的KR C4控制器则首次将完整的安全控制器整合进单个控制系统,这就允许全部任务可以一起执行。
未来的里程碑可能以何种形式出现呢?
1多台机器人协同技术的机器人
大数据和云存储技术使得机器人逐步成为物联网的终端和节点。信息技术的快速发展将工业机器人与网络融合,组成复杂性强的生产系统,各种算法如蚁群算法、免疫算法等可以逐步应用于机器人应用中,使其具有类人的学习能力,多台机器人协同技术使一套生产解决方案成为可能。
2易用性与稳定性进一步提升的机器人
随着机器人标准化结构、集成一体化关节、自组装与自修复等技术的改善,机器人的易用性与稳定性不断被提高。
一是机器人的应用领域已经从较为成熟的汽车、电子产业延展至食品、医疗、化工等更广泛的制造领域,服务领域和服务对象不断增加,机器人本体向体积小、应用广的特点发展。
二是机器人成本快速下降。机器人技术和工艺日趋成熟,机器人初期投资相较于传统专用设备的价格差距缩小,在个性化程度高、工艺和流程繁琐的产品制造中替代传统专用设备具有更高的经济效率。
三是人机关系发生深刻改变。例如,工人和机器人共同完成目标时,机器人能够通过简易的感应方式理解人类语言、图形、身体指令,利用其模块化的插头和生产组件,免除工人复杂的操作。现有阶段的人机协作存在较大的安全问题,尽管具有视觉和先进传感器的轻型工业机器人已经被开发出来,但是目前仍然缺乏可靠安全的工业机器人协作的技术规范。
3模块化、智能化和系统化高度发展的机器人
目前全球推出的机器人产品向模块化、智能化和系统化方向发展。
第一,模块化改变了传统机器人的构型仅能适用有限范围的问题,工业机器人的研发更趋向采用组合式、模块化的产品设计思路,重构模块化帮助用户解决产品品种、规格与设计制造周期和生产成本之间的矛盾。例如,关节模块中伺服电机、减速机和检测系统的三位一体化,由关节、连杆模块重组的方式构造机器人整机。
第二,机器人产品向智能化发展的过程中,工业机器人控制系统向开放性控制系统集成方向发展,伺服驱动技术向非结构化、多移动机器人系统改变,机器人协作已经不仅是控制的协调,而是机器人系统的组织与控制方式的协调。
第三,工业机器人技术不断延伸,目前的机器人产品正在嵌入工程机械、食品机械、实验设备、医疗器械等传统装备之中。
如今已经即将步入2019年,国际机器人生产企业纷纷来华落户抢滩。然而,相对于欧洲、美国和日本,我国在该领域起步较晚,缺少自主品牌的工业机器人。为摆脱在新型传感、先进控制等核心技术上受制于人的窘迫局面,有必要大力发展民资工业机器人品牌,实现机器人高精度减速器、伺服电机等关键性零部件的独立设计生产。最终在国际工业机器人领域抢占一席之地,于工业机器人发展史上留下同样浓墨重彩的一笔。
-
机器人
+关注
关注
211文章
28476浏览量
207408 -
工业机器人
+关注
关注
91文章
3369浏览量
92715
原文标题:盘点 | 工业机器人史上那些重要的第一次
文章出处:【微信号:im_robotic,微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
ADS1256第一次上电的时候,采集的ADC信号是实际值的一半,为什么?
DDC264第一次执行初始化,DOUT无输出的原因?怎么解决?
旗晟机器人:在能源机器人产业推进委员会中探索发展
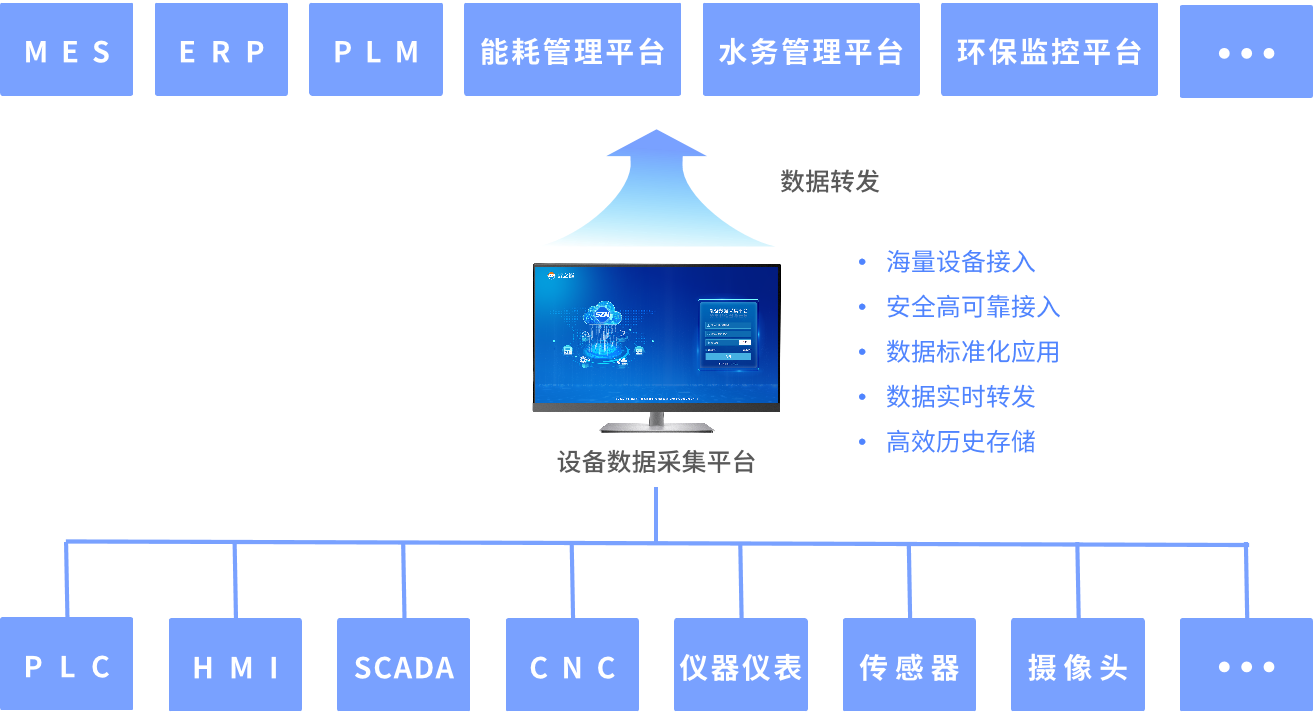
工业机器人联网通信系统解决方案
六轴焊接机器人多久检修一次
加速生产数据向AI机器人转化,剖析NVIDIA机器人堆栈式资源







 工商网监
工商网监
评论