 为了让Atlas这样走路,IHMC开发了一种新的全身控制框架
为了让Atlas这样走路,IHMC开发了一种新的全身控制框架
人形机器人有着与人极为不同的步态。膝盖弯曲、躯干尽可能不动。甚至波士顿动力公司的Atlas也是用这种蹲着走的方式走动,因为其总是弯着的腿可让它避免摔倒。这种步态在人形机器人中非常常见,已经成为“正常”的机器人步态,但这并不像人类走路的方式。我们用直腿走路,每迈一步都要锁住膝盖,因为这样更容易支撑我们的体重。你可以自己尝试一下:像“双足机器人”那样用弯曲的膝盖走路会让人很累,因为你的腿部肌肉一直都需要参与运动。
在人类与机器认知研究所(IHMC),机器人专家们正在忙着解决这个问题,他们教Atlas更像人一样走路。除了使人形机器人更有效率之外,更自然的行走步态也能让它们更加灵活,相比于蹲着走路的机器人能够应对更加崎岖的地形。
大多数机器人不会这样走路,因为弯曲的膝盖能给它们更多的控制。对于弯曲的膝盖,你可以更多地弯曲或伸直它,以帮助你的机器人保持稳定,而直腿意味着平衡必须主要用脚踝来实现。你可能会注意到的另一个区别是,弯腿行走的机器人倾向于把脚抬得笔直,然后再放下来,而IHMC则教Atlas像人类一样使用“脚趾离地”的动作。这样子走路是一个更难解决的问题,这就是为什么Atlas这样走路时看着很奇怪 ——除了极少数例外(DURUS就是其中之一),人形机器人不用直腿走路。
为了让Atlas这样走路,IHMC开发了一种新的全身控制框架,可以轻推控制器使机器人伸直腿,而不需要腿对地面施加明显的力。通过让其他运动(如机器人脚的运动)不受约束,自然的步态行为(比如脚趾离地动作)就会自动出现。换句话说,IHMC没有必要专门编程,这只是控制器为走路时试图保持直腿想出的最佳解决方案。毫无疑问,受限制较少的控制器会产生更自然的步态,而在现实世界的测试中,Atlas能够在各种地形上行走,甚至可以在腿伸直的情况下对略有攻击性的推动作出反应。
为了了解更多细节,我们通过电子邮件采访了Robert Griffin,他是发表在澳大利亚布里斯班举行的2018年机器人与自动化国际会议(ICRA2018)上的论文“Straight-Leg Walking Through Underconstrained Whole-Body Control”的第一作者。该论文的另外几位作者是Georg Wiedebach、Sylvain Bertrand、Alexander Leonessa和Jerry Pratt,他们都来自IHMC。
IEEE Spectrum:你能否给总结一下为什么大多数两足机器人都是蹲着走路,而为什么大多数人并不是这样走路?
Robert Griffin:人类可能会用较直的腿走路,因为弯曲的腿走路效率要低得多。直立时膝盖几乎不需要用力,而弯曲的膝盖需要承受很大的力量。然而,用于机器人的大多数步行模型假定在整个步态中具有恒定的质心高度。它们实现这个恒定高度的唯一方法就是以蹲着的姿态走路。另外,规划高度轨迹是一个相当具有挑战性的问题,特别是对于机器人需要实时计算轨迹的在线应用来说更是如此。这导致大多数科学家在开放这样的在线应用时回避了这个问题。最后,蹲着行走可以让机器人避免伸直腿,从而避免了遭遇膝关节处的奇点的可能,而这个奇点是很难处理的。
IEEE Spectrum:直腿走路有什么缺点?
Robert Griffin:当用直腿走路时,机器人的控制能力较差。想想运动员:他们以“运动姿态”略微弯曲膝盖,以便能够快速改变方向。当你的膝盖是直的时,你不能用它来向地面施加推力。当膝盖弯曲时,你可以获得更大的地面反作用力,从而获得更大的平衡控制力。此外,直腿对迈步的影响也是不可避免的。这对于机器人来说可能很难处理。
IEEE Spectrum:视频中Atlas走路的方式与我们看到的DORUS的走路方式类似。你们的研究与他们的工作有什么关系?
Robert Griffin:DURUS表现出的步态非常好,我很高兴我们的工作能与之相提并论,因为我们的研究和他们的研究都在努力实现更自然、更像人类的步态。据我所知,他们采取的方法与我们的有很大的不同,他们使用机器人的混合-零动态进行离线优化,以确定关节设置点并生成特定的步态。在我们的方法中,我们没有直接为机器人定义关节命令,而是在线计算所有内容,包括动态轨迹。
IEEE Spectrum:较少的约束在多大程度上导致了更自然的行走方式的出现?你觉得惊讶吗?
Robert Griffin:在我们的这项研究工作中,我们并没有指定一个期望的高度,我们也没有指定脚趾离地时的脚间距。这使机器人能够用更直的腿走路。它还允许机器人根据需要使用脚趾离地动作。我觉得首先让我感到惊讶的是脚趾离地动作。我也对机器人在必要时弯曲膝盖和降低高度来完成水平任务的能力感到惊讶。在模拟中,我们能够让它使用更长的单步(从静止开始到一步后的静止结束,大约1.5米),以及能够让它使用更长的下降步(大约0.5米)。我们对于在硬件上尝试这些倍感兴奋,但是还没有机会去做这样的尝试。
IEEE Spectrum:当你们说你们想让机器人“像人类一样穿越类似的地形”时,你能描述一下你们正在考虑什么样的具体能力吗?
Robert Griffin:长期愿景是使机器人能够具有像人类一样的移动能力,从而它们可以作为真正的人类化身。我们接下来想用这种算法尝试的是更大的下降步,特别是机器人不知道它需要向下迈步的不确定情况下。人类真的很擅长这一点,我们的步态天生就能抵御不确定性。我们现在正在尝试设计方法,使用单一算法让它既能在准确的位置落脚(比如在一个只有少量、稀疏的落脚点的岩石区域行走时),又能在精准失效时保持稳健(例如在具有许多微妙高度的地形上行走时)。目前我们所拥有的技术具有非常好的准确性,而像ATRIAS这样的机器人对不确定性表现出了令人印象深刻的稳健性。再思考思考,借助一些技巧,我们可以将这种稳健性与准确性结合起来,制作出真正有能力的机器人。
-
控制器
+关注
关注
112文章
16389浏览量
178435 -
机器人
+关注
关注
211文章
28476浏览量
207413
原文标题:IHMC教Atlas像人一样走路
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SSM框架的源码解析与理解
SSM框架的优缺点分析 SSM在移动端开发中的应用
SSM框架在Java开发中的应用 如何使用SSM进行web开发
一种面向飞行试验的数据融合框架

爱普生开发了一种烤箱控制的晶体振荡器,其功耗比传统OCXOs1低56%

BitEnergy AI公司开发出一种新AI处理方法
tft屏幕属于lcd屏幕的一种吗
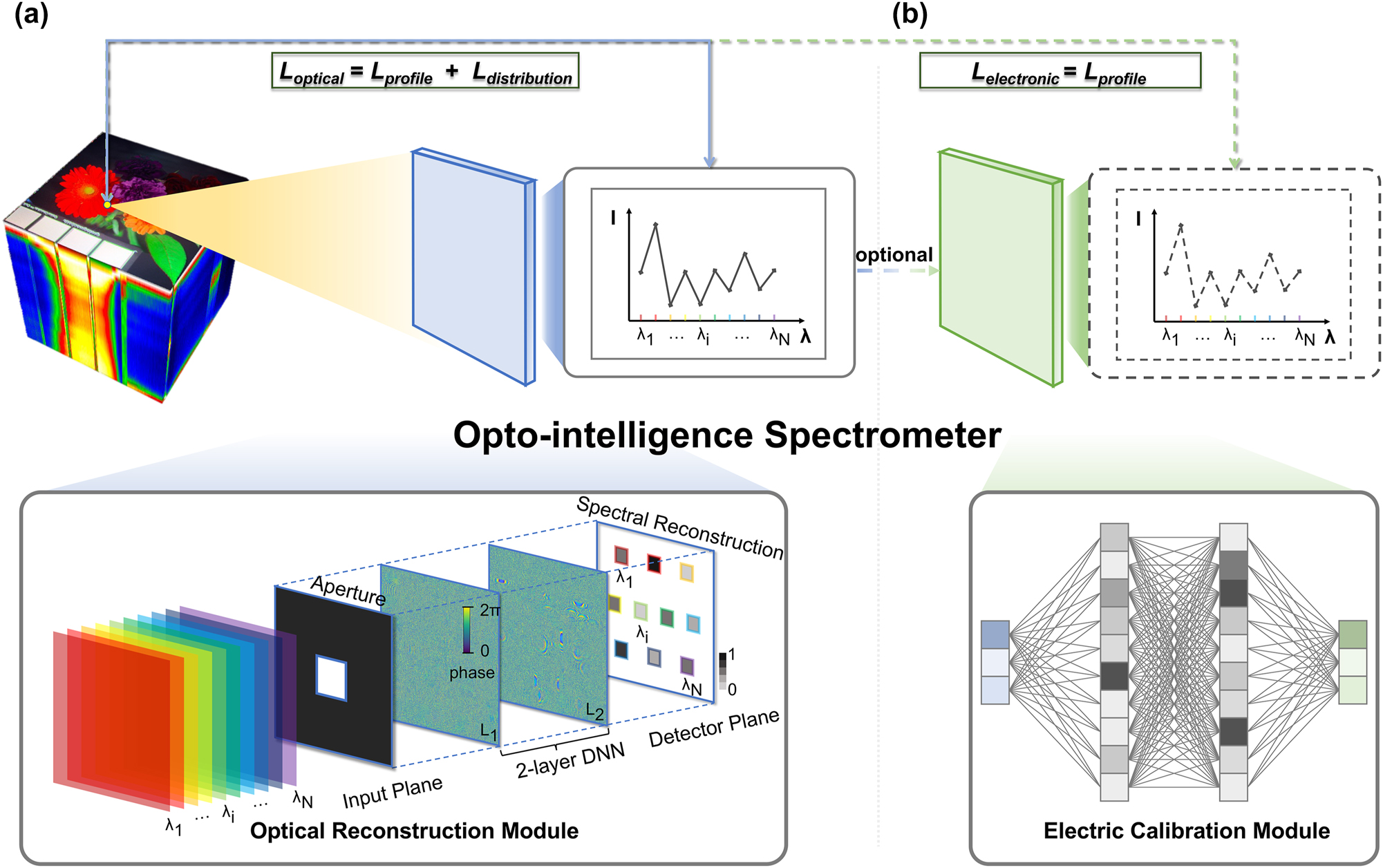
一种新型全光学智能光谱仪
bootstrap框架用什么软件开发
rup是一种什么模型
基于一种AI辅助可穿戴微流控比色传感器系统

一种高效的KV缓存压缩框架--GEAR





 工商网监
工商网监
评论