 自主移动机器人,究竟“智能”在哪里?
自主移动机器人,究竟“智能”在哪里?
自主移动机器人是智能工厂物流系统的重要组成部分,它并不是简单意义上的代替人工劳动,它既有对复杂环境的快速反应和分析判断能力,又具有机器长时间工作、精确度高、避障绕障等能力,成为智能工厂在数字化改造过程中优先考虑的目标。
那么,自主移动机器人,究竟“智能”在哪里?
1.自主移动机器人可即时定位。
自主移动机器人的即时定位,是在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
在SLAM技术中,机器人利用自身携带的传感器识别未知环境中的特征标志,然后根据机器人与特征标志之间的相对位置和里程计的读数,估计机器人和特征标志的全局坐标。这种在线的定位与地图创建需保持机器人与特征标志之间的详细信息。
集成于移动机器人SRC系列核心控制器的定位导航系统,通过激光 SLAM 算法,实现了±10 mm 的高精度定位,快速建立工作场景地图,修正地图、自动定位导航等。
2.自主移动机器人可自主规划路径

仙知多机调度系统RoboRoute配合可视化软件Roboshop,可快速建立整厂的路径模型
路径规划是移动机器人自主导航的最基本环节之一,所谓路径规划是指在有障碍物的工作环境中,按照某一性能指标搜索一条从起始状态到目标状态的最优或近似最优无碰路径。
移动机器人自主规划路径,需要实现至少两个层次的模块:
一个是全局规划,就是在地图上预先规划一条线路,也要有当前机器人的位置,这是由 SLAM系统提供的,行业内一般通过先进的搜索算法来实现这个过程。
另一个是局部规划,现实场景中有很多突发情况,比如有障碍物挡道了,移动机器人需调整原先的路径。此时,它并不需要重新计算一遍全局路径,稍微绕个弯就可以。
通过3D SLAM结合多传感器、基于地图的多传感器系统辨识技术、多机器人调度系统RoboRoute等,可实现整厂环境的多机协作、路径规划、交通管制等功能。
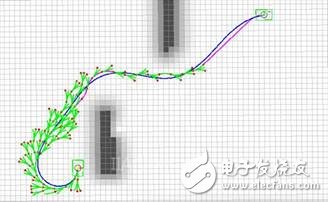
启发式搜索到最优路径
3. 自主移动机器人极具灵活性
多规格扩展性平台的仙知AMB系列无人搬运底盘,可满足不断变化的生产要求
自主移动机器人不仅可以与周围环境交互,还可以满足不断变化的生产环境和生产要求,实现了快速、经济、高效地自动化运输物料。
极具灵活性的自主移动机器人,帮助企业轻松应对生产任务的变更,只需将移动机器人重新部署到不同的流程或设施布局,实时优化企业的生产节奏。
自主研发的多机器人调度系统RoboRoute,可自动挑选最适合的移动机器人执行订单、规划多台移动机器人最合理的行走路线,以及整厂环境的交通管制,预防机器人之间发生冲突,使得智能工厂的物流转运环节更加灵活。
仙知多机器人调度系统RoboRoute,可自动挑选最适合的机器人执行订单
4.自主移动机器人可广泛应用于各领域
仙知AMB系列无人搬运底盘搭载不同应用扩展,实现多种场景应用
在实际应用场景中,移动机器人需在自身位置不确定的条件下,利用激光扫描仪、相机、多传感器等,在完全未知环境中创建地图(如一些不可事先获取工作环境的场所)。
机器人还可配合机架、货架、协作机器人手臂等,满足不同应用领域的移动运输需求。
仙知自主研发的全系列激光导航移动机器人,适用于汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务等领域。
根据不同场景需求,仙知机器人可实现24小时不间断、精准稳定、高校灵活运输物料等功能。
-
移动机器人
+关注
关注
2文章
761浏览量
33560 -
人工智能
+关注
关注
1791文章
47146浏览量
238133
发布评论请先 登录
相关推荐
思岚科技荣获双年度移动机器人优质供应链奖
移动机器人的技术突破和未来展望

智能移动机器人系统方案指南

传感器融合如何赋能自主移动机器人

智能移动机器人

如何借助恩智浦MCX系列MCU纠错功能,打造可靠安全的移动机器人?

智能移动机器人系统的用途和市场趋势
海康机器人第100000台移动机器人下线
自主移动机器人的发展路径与前沿解决方案探究

自主移动机器人(AMR)功能和特点

富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
5个问题,洞悉自主移动机器人未来发展方向

AMR(自主移动机器人)提升安全性:从预防到保护
自主移动机器人的未来发展方向







 工商网监
工商网监
评论