 UAVOS成功测试其VTOL无人机的新飞行算法
UAVOS成功测试其VTOL无人机的新飞行算法
美国UAVOS公司宣布已成功测试其VTOL(垂直起降)无人机的新飞行算法。新的飞行模式旨在为飞行期间无人机推进系统发生故障提供高水平的安全性。
GLIDER飞行模式不仅允许无人驾驶直升机在发动机发生故障时自动切换到自转模式,而且还可以在关键飞行条件下保护动力单元免于过载。新的飞行算法显着提高了无人机的生存能力,从而提高了飞行安全性并降低了保险成本。
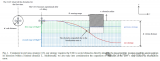
新算法的基本原理是基于维持主旋翼转数的优先级,不利于在危急情况下保持预设的高度。这是通过控制的重新分配,当发动机不支持主旋翼的旋转时,以及通过总距(所有叶片的总仰角的变化)来实现的。新的自转算法是UAVOS编程的自动驾驶模块的一部分。
董事会和首席开发人员UAVOSСhairman的Aliaksei Stratsilatau说:“我们在操作直升机时开发了新的飞行算法。极端不利的气象条件和高空飞行能力极限导致发动机在任务期间发生故障的风险。新的飞行算法GLIDER为无人机自动控制系统操作员提供了额外的时间来发射紧急降落伞或选择紧急着陆点。此外,直升机可以从可居住区域或人造物体转移。例如,在电力线,炼油厂,储油库等任务期间尤其如此。由UAVOS开发的算法允许在没有大量动力储备的情况下飞行,这会影响任务的持续时间和额外的机载燃料量。”
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
发动机
+关注
关注
33文章
2506浏览量
69865 -
无人机
+关注
关注
230文章
10554浏览量
183046
原文标题:UAVOS垂直起降无人机自救新姿态
文章出处:【微信号:youuav,微信公众号:无人机网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
当无人机设备遇上气密性测试设备会有什么好处?
如今,随着无人机技术的快速发展,无人机设备的性能和安全性已经成为市场关注的焦点。其中,无人机的气密性作为一个重要指标,直接关系到其飞行稳定性

集性能与成本于一身的IMU,让无人机飞行更稳定
无人机在进行任何形式的飞行时,必须了解空中平台的方向、其运动的性质以及飞行方向。通常用于测量此运动的是IMU,IMU提供与无人机三个轴向的加


无人机飞行仿真模拟训练系统
智慧华盛恒辉无人机飞行仿真模拟训练系统,也称无人机仿真训练模拟器,是一种集模拟训练演练与无人机飞行控制数据模拟验证于一体的仿真系统。 一、系
开源项目!用ESP8266 DIY会爬墙的无人机
,我们可以使用它进行通信。
ESP8266开源、互动、可编程、低成本、简单、智能、最低成本的Wi-Fi硬件。
至于无人机的飞行范围。测试已经得到了范围大约是70米,使用三星手机充当WiFi热点和远程
发表于 07-04 09:22

如何利用无人机物联卡实现无人驾驶飞行
无人机物联卡是专为无人机设计的物联卡,实现实时连接并提供定位、控制、数据传输等功能。无人驾驶飞行通过传感器、控制算法和
无人机飞行中定位误差的影响探究
无人机(UAV)的最大安全飞行速度是衡量其在完成各种任务时效率的重要指标。该指标受诸多参数影响,如无人机定位误差、感知范围和系统延迟等。
发表于 03-22 10:32
•812次阅读
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
科技的视角,深入探讨无人机的组成与工作原理,为您揭开无人机飞行的神秘面纱。
一、无人机的组成结构
无人机主要由机身、动力系统、飞控系统、传感
发表于 03-12 11:28
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
随着科技的飞速发展,无人机技术已经渗透到我们的日常生活中,无论是航拍美景、农业喷洒、快递配送,还是灾害救援、军事侦察,无人机的身影都越来越常见。然而,随着无人机使用的普及,其安全问题也
发表于 03-12 11:13
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
高精度传感器和智能算法,无人机反制系统能够在短时间内发现目标无人机,并对其进行准确识别。随后,系统会迅速锁定目标,并通过发射干扰信号、切断通信链路等方式,迫使
发表于 03-12 10:56
第一集 知语科技无人机反制技术与应用--无人机的定义与分类
了解无人机反制技术与应用,为您揭开这一神秘领域的面纱。
一、无人机技术概述
1 无人机的定义与分类
无人机,即无人驾驶
发表于 03-12 10:42
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
的解决方案。
无人机侦测与追踪技术 知语云智能科技研发出高效的无人机侦测与追踪技术,能够迅速发现非法飞行的无人机,并通过高精度追踪系统锁定其
发表于 02-27 10:41
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
作为知语云智能科技的创新产品,具备高效、智能、安全等特点。该系统通过先进的雷达探测技术,能够迅速发现目标无人机,并进行精确跟踪。同时,结合高速计算机处理技术和智能算法,无人机防御系统能够准确判断
发表于 02-26 16:35





 工商网监
工商网监
评论