 开发自动驾驶汽车时的雷达选用原则
开发自动驾驶汽车时的雷达选用原则
自动驾驶汽车开发中,激光雷达理应是不能少的器件。但是车规的激光雷达,外国品牌在15万元的价位,国产也在5万的价位上。业内人士一看,就知道,如果激光雷达,成本不下降到1万以下,中国自动驾驶汽车要上市是不可能的。目前的产品基本上是,研究层面的事情,离上市还远得很。好在国内激光雷达生产厂家越来越多,水平越来越高,成本下降的空间也是越来越大。整车厂自动驾驶汽车开发工程师,对激光雷达,做深入了解的要求也是越来越高。下面做系统介绍,供同行参考。
一、对激光雷达的认识
普通人对雷达的认识基本上源于电影的画面(图1),雷达可以发现敌人飞机。
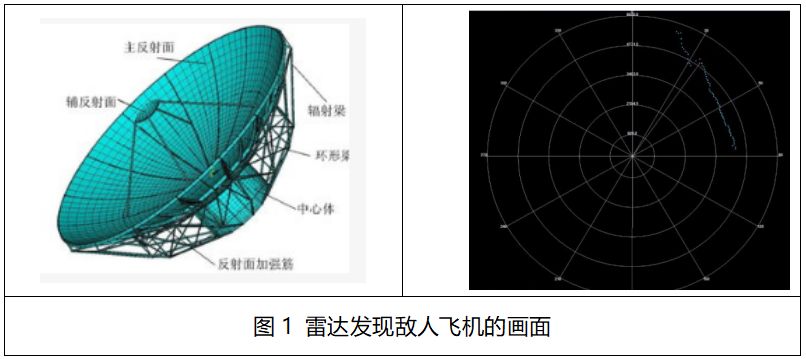
有一个指针,在屏幕上做360度的旋转,再就听到了中国人民解放军的工作人员在报告首长,在什么方位上,发现了敌人的飞机而已。其工作原理?电影没有解释,给人基本知识是,人用肉眼,看不见飞机的时候,用雷达,可以看到飞机的行踪。自动驾驶汽车开发中,要用到雷达,是近几年的事情。汽车为什么要用雷达?其功能是什么?如何用雷达?尤其是自动驾驶汽车开发的相关工程师,都想了解和学习。
一、雷达工作原理、功能、分类
雷达是通过发射和接受无线电波,来实现对目标的探测,现代雷达可以同时探测目标的距离、方位、高度、速度、形状和目标类型等。
(1)工作原理
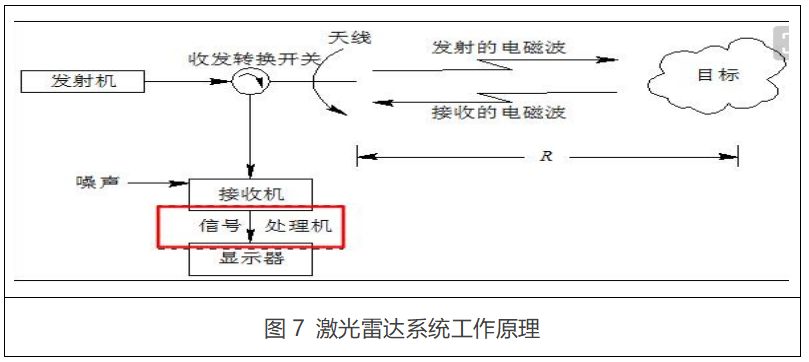
①雷达设备的发射机,通过天线把电磁波能量射向空间某一方向(图2),处在此方向上的物体反射碰到的电磁波;
②雷达天线接收此反射波,送至接收设备进行处理,提取有关该物体的某些特征信息(如:目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。
具体应用:
①测量距离,是在测量发射脉冲与回波脉冲之间的时间差,电磁波以光速传播,据此就能换算成目标的精确距离;
②测量目标方位,是利用天线的尖锐方位波束测量技术,测量仰角靠窄的仰角波束,根据仰角和距离就能计算出目标高度;
③测量速度,利用相对运动产生的频率多普勒效应原理。雷达接收到的目标回波频率与雷达发射频率不同,两者的差值称为多普勒频率。
(2)雷达基本功能
雷达基本功能,相似人的眼睛和耳朵。物理学告诉大家,不论是可见光或是无线电波,在本质上是同一种东西,都是电磁波。在真空中传播的速度都是光速(c),差别在于它们各自的频率和波长不同。中学物理学知识告诉人们,真空光速定义值:c0=299792458m/s((一般取300000km/s即每秒30万公里)。
可以这样理解,雷达用到汽车上,可以测量汽车之间相对速度、距离;可以测量汽车与障碍物之间距离;可以测量障碍物轮廓尺寸等。
(3)雷达的种类繁多,分类方法也非常复杂
①按照雷达信号形式分类,有脉冲雷达、连续波雷达、脉部压缩雷达和频率捷变雷达等;
②按照角跟踪方式分类,有单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫描雷达等。
③按照目标测量的参数分类,有测高雷达、二坐标雷达、三坐标雷达等;
④按照雷达采用的技术和信号处理的方式,有相参积累和非相参积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描边跟踪雷达;
⑤按照天线扫描方式分类分类,分为机械扫描雷达、相控阵雷达等;
⑥按雷达频段分,可分为超视距雷达、微波雷达、毫米波雷达以及激光雷达等。
二、自动驾驶汽车开发中雷达选用原则
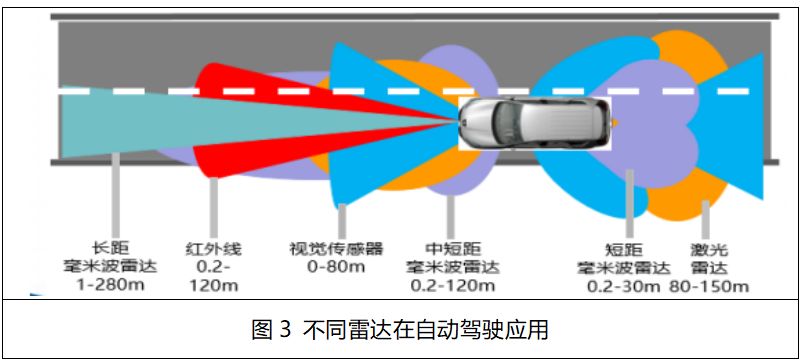
自动驾驶汽车开发中,必须要用到雷达(见图3),不用多说了;或者说,没有雷达技术的支持,就没有自动驾驶汽车的出现。人们要问的是,如何选用雷达?
1)必须选用车规级雷达
雷达产品分类十分复杂,从自动驾驶汽车开发的出发点来说,一般是按雷达频段分,可分为超视距雷达、微波雷达、毫米波雷达以及激光雷达等。但是从产品质量来说,这些雷达必须是车规级的。通俗地理解,雷达要符合汽车车用标准的,低了,满足不了汽车使用环境,其生命周期比较短;高了,成本也高,汽车用不了。
2)雷达用在汽车什么场景,要实现什么能?
(1)泊车系统中,超声波雷达。
①原理:
超声波雷达,是利用传感器内的超声波发生器产生40KHz的超声波,再由接收探头,接收经障碍物反射回来的超声波。根据超声波反射接收的时间差,来计算与障碍物之间的距离。
②优势:
超声波雷达成本较低(单价:100元左右),探测距离近,精度高,且不受光线条件的影响。
③实例:
宝马的i系列和7系列,已经支持使用车钥匙,遥控汽车自动泊车。在操作过程中,用户只需要发出前进或后退两个指示,汽车就会持续使用超声波传感器检测车位和障碍物,自动操作方向盘和制动器,实现自动泊车。
④图例:

(2)ADAS系统中毫米波雷达
①原理:
毫米波,毫米波的波长介于厘米波和光波之间,波长在1mm到10mm之间的电磁波,换算成频率后,毫米波的频率位于30GHz到300GHz之间。毫米波雷达系统,主要包括天线、收发模块、信号处理模块,其中芯片、天线、PCB板是毫米波雷达的硬件核心。
②优势:
毫米波兼有微波制导和光电制导的优点。近些年,随着毫米波雷达技术水平的提升和成本的下降,毫米波雷达(见图4)开始应用于汽车领域。
③实例:
④图例:
(3)L4级别以上自动驾驶车辆激光雷达
①原理:
②优势:
a)激光直线传播、方向性好、光束非常窄,弥散性非常低;
b)其角分辨率不低于0.1mard,也就是说可以分辨3km距离上相距0.3m的两个目标,距离分辨率可达0.1m;速度分辨率能达到10m/s以内;
c)自然界中,能对激光雷达起干扰作用的信号源不多,抗有源干扰能力强。
③实例:
激光雷达,因其在测距测速、三维建模等领域的优越性,L4级别以上自动驾驶车辆,是必选件。
④图例:
有了激光雷达,可实现车辆前向间距预警、车辆双侧间距预警、车辆转向盲区预警、车辆车道偏离预警等功能。
3)不同车辆几何尺寸不同,要与雷达几何大小配合好
①一维激光雷达,主要用于测距测速等,一般安装在车内、风挡玻璃前面,后者安全后视镜上;
②二维激光雷达,主要用于轮廓测量、物体识别、区域监控等,一般安装在车外面的前头;
③三维激光扫描仪、三维激光雷达,实时三维空间建模,一般安装在车顶;
激光雷达还可以测量出周边其他车辆在三个方向上的距离、速度、加速度、角速度等信息,再结合GPS地图计算出车辆的位置。
4)雷达有一定几何尺寸及性能指标,要认真了解和验证
①国产的16 通道激光雷达跨阻放大器 LS1716M 芯片
②其参数如下:
电源电压:3.3V;·输入 :APD 管的 N 极与输入相连,P 极接负压,16 通道跨阻放大器;单端输入,单端输出;·四种可编程跨阻放大器增益模式:86dBΩ / 80dBΩ / 74dBΩ / 68dBΩ;接收器带宽> 200MHz·可接受最小激光脉冲半宽度:3.5ns;·单通道功耗< 70mW;·可选通输出,通道切换时间<100ns;·输出阻抗:50Ω; ·LQFP80L 封装。
③激光雷达必须要厂家软件支持。目前国产品牌激光雷达,配有相应软件,培训和服务基本到位。
③性价比比较高的国产激光雷达
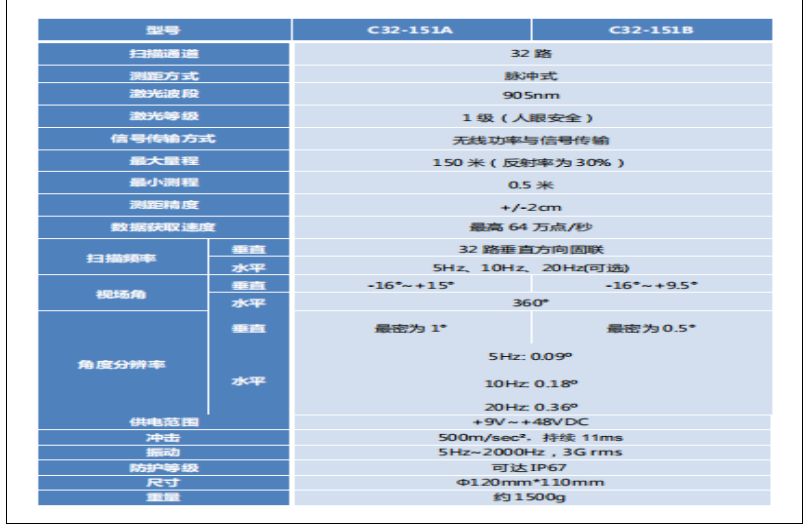
图11 国产激光雷达参数
32 线激光雷达能够对周围环境进行三维扫描探测。此系列产品应用广泛,可应用于汽车辅助驾驶(ADAS)、无人驾驶汽车。其特点是, 实时、360°、三维坐标和距离等,性价比优异。
三、总结
1)自动驾驶汽车的最高级别是无人驾驶。借用雷达选用情况,可以基本划分出自动驾驶级别来,
2)没有配有雷达的,一定是人工驾驶汽车;
3)配有超声波雷达的,可以归类辅助驾驶汽车了;
4)配有超声波雷达、毫米波雷达的,可以归类L3类自动驾驶汽车;
5)配有超声波雷达、毫米波雷达的,激光雷达,可以归类L3、L4
类自动驾驶汽车;
要注意,雷达是一个系统,不仅有硬件、软件,还必须对外有接口,开发过程工程师,一定对雷达系统性能指标参数,要了解、掌握他。
-
雷达
+关注
关注
50文章
2936浏览量
117547 -
自动驾驶汽车
+关注
关注
4文章
376浏览量
40834
原文标题:自动驾驶汽车开发中 雷达选用原则的研究
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
使用PVA引擎优化自动驾驶汽车CV开发流水线








 工商网监
工商网监
评论