 谷歌Project Soli能为触控行业带来什么新动向
谷歌Project Soli能为触控行业带来什么新动向

谷歌的Project Soli是使用毫米波雷达做人机交互的项目,最早于2015年的谷歌IO大会发布。在经过数年迭代后,在2019年初有了最新消息,即Project Soli系统所需要的13dBm发射功率通过了FCC认证,为Project Soli的真正商用化铺平了道路。那么,Project Soli能为触控行业带来什么新动向呢?是否会颠覆原来的触控技术?且看本文分解。
触控,三维触控和手势识别
在正式分析Project Soli的技术之前,我们首先看几个概念:触控,三维触控,以及手势识别。
触控这个概念想必大家已经非常熟悉,简而言之就是用户通过接触屏幕与屏幕做互动,每天生活中使用的触摸屏就是触控的典型例子。目前,触控主要是用二维触控,即触摸屏可以识别用户在屏幕平面上的按压,拖动等动作。
目前的触控技术还主要是在二维屏幕平面上的二维触控技术
在二维触控技术成熟之后,业界一直在寻找突破二维平面限制的方法。随着AR/VR等下一代智能设备概念渐渐落地,伴随着这些新设备的新交互方式也提上了议事日程。众所周知,AR/VR等新一代设备需要沉浸感和体感体验,因此使用传统的二维触控难以满足这类下一代智能设备的需求。另外,随着智能家电概念的进一步普及,越来越多的家电连上了网装上了智能操作系统,传统的几个按钮已经不能满足操作的需求,根据应用场合,不少家电也在寻找非接触式的操作(例如吸油烟机操作,大家一定都不太想用手去摸那个油腻的操作面板)。随着这些需求的兴起,突破二维平面的触控方法就成为了人机交互的新热点。
超越二维的触控又可以细分为两种方法。一种方式是三维触控。在三维触控中,用户无需真正物理接触触摸屏就可以完成触摸屏上的点击、拖拽等操作,可以想象成隔空操作二维触摸屏。此外,三维触摸屏还将支持记录用户手指距离屏幕的距离信息,从而支持一些三维空间的新手势操作。
与三维触控相对的是三维手势识别。三维触控会精确记录用户手在空间的三维(x,y,z)坐标,并根据该坐标的时间变化来完成相应交互。三维触控关注用户手的绝对坐标,因此能完成软键盘打字、按键等操作。而三维手势识别关注的是用户手的整体在三维空间中的相对移动(而非绝对位置),并根据该相对移动来检测手势并完成交互。根据我们下面的分析,我们会看到Project Soli的技术主要针对三维手势识别应用,而三维触控则需要使用其他技术来实现。
Project Soli的技术:原理,优势和局限性
Project Soli使用的是毫米波雷达技术。与雷达的原理相似,Project Soli的雷达传感器芯片首先发射出电磁波,而发射的电磁波经过用户手的反射回到传感器端,就能根据回波来检测用户手的位置和动态,并借此完成三维非接触手势检测。
Project Soli的雷达使用的是57-64GHz的频段,理论上可以实现毫米级别的分辨精度。根据报道,该雷达系Google和英飞凌合作设计,雷达传感器芯片可以集成到硬币大小的芯片中,从而可以安装在各类设备上。下图是Project Soli使用的毫米波雷达传感芯片。芯片大小约为8mm x 10mm,上面白色的小点是用来把芯片固定到主板上的焊锡球(bump)。芯片上还有天线阵列(绿色框内)用来实现波束成型,根据官方信息该芯片上集成了四个发射机和两个接收机,使用波束成形来提升分辨率。
使用雷达的优势首先是系统硬件比较简单,也不需要一个物理屏幕,只需要一个雷达传感器模组就足够了。另一方面,通过雷达回波的信号处理和机器学习分析,可以做到手势识别之外的其他功能,例如物体检测,物体材质检测等等,有可能在未来开启一些新的有趣的应用。
然而,使用毫米波雷达也有局限性。首先,毫米波雷达如果需要做高精度高分辨率检测需要使用复杂的天线和/或多个雷达收发阵列。在60GHz频段上,复杂的天线阵列的体积很大,因此在智能家电等应用上就难以使用。而如果使用多个雷达收发阵列则会大大增加系统功耗。其次,Project Soli选择60GHz频段的主要理由是因为该频段受到的政府管制较少,而且是免费使用;但是60GHz频段的主要问题是它在空气中衰减特别大,因为60GHz是氧气的共振频率,所以许多这个频段的电磁波能量在传播过程中就被空气吸收了。因此,使用60GHz实际上限制了Project Soli的检测距离,另外由于电磁波能量被空气吸收也会降低信噪比,即降低检测精度。这也是为什么Project Soli需要向美国FCC申请提高60GHz频段输出功率的原因,主要预计就是为了提升检测距离和精度。
综合以上Project Soli毫米波雷达的优势和局限,并结合应用的成本、体积、功耗限制,我们不难发现,Project Soli最适合的应用就是智能家电和设备上的近场手势识别,即检测距离在一米以内的手势识别。由于Project Soli的检测精度有限,因此难以做到三维触控所需要的绝对位置高精度检测,但是手势检测应当不成问题;此外由于60GHz频段的空气衰减问题,限制了其检测距离,因此较适合做近场手势识别。
其他三维手势识别和三维触控技术
如前所述,Project Soli主要针对的是近场三维手势识别。为了满足应用的需求,还会有其他技术在未来的三维手势识别和三维触控领域受到关注。
在近场手势识别方面,超声波是另一个可选方案。超声波方案与毫米波方案原理相似,只是超声波方案使用的是超声波而不是电磁波。超声波方案的优势是功耗较小(可以小于1mW而毫米波方案的功耗在10-100mW),缺点是必须使用CMOS工艺无法实现的超声波元件,而毫米波方案可以完全使用CMOS电路实现,集成度较高。
此外,不少应用会需要远场(1米以上距离)三维手势识别技术,例如体感游戏等。目前,这类远场手势/姿势识别主要使用摄像头和计算机视觉算法来实现。随着计算机视觉的发展,基于双目摄像头、ToF深度传感器等的方案正在成为主流,同时我们也看到在这类远场三维手势技术正在进入越来越多的应用,包括大型商场的互动屏幕、AR/VR游戏和交互等等。
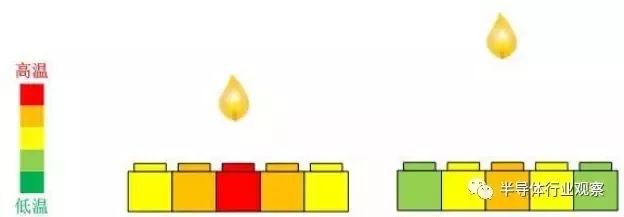
除了手势识别之外,不少交互需要用到能记录用户手绝对位置的三维触控。三维触控可以看作是传统二维触控在三维空间的推广,而三维触控中的主流技术是电容感应技术。毫米波雷达技术利用的是动态电磁波,而电容感应技术利用的是静电场。电容感应型三维触控技术是目前电容触摸屏的增强版:电容触摸屏可以感应到与屏幕接触的手的位置,而电容感应式三维触控技术则增强了感应范围,在手尚未接触到屏幕时就能感应到手在空间中的三维位置,从而实现三维触控。为了理解电容感应式三维触控的原理,我们不妨想象有许多热传感器组成的阵列,而传感器阵列上方有一个火苗(热源)。根据传感器的相对温度分布(即哪里温度比较高,哪里温度比较低)我们可以知道火苗在哪一个传感器上方(即火苗的二维位置),根据传感器的绝对温度(即传感器探测到的绝对温度有多高)我们可以知道火苗离传感器有多远(即火苗在空间中第三维的位置)。结合这两条信息我们可以得到火苗在空间中的三维位置。电容传感式三维触控的原理也是这样,只不过这里探测的不是火苗带来的温度改变而是手指带来的静电场改变。通过探测哪一个电容传感器探测到的静电场改变最大我们可以感应到手指的二维位置,而通过电容传感器探测到静电场改变的绝对强度我们可以感应到手指的第三维坐标,从而实现三维触控。
电容传感式三维触控的优势在于传感器的功耗可以远远小于毫米波雷达(大约仅仅是毫米波雷达的十分之一甚至更小),因此可以安装在对功耗比较敏感的移动设备上。此外,电容传感式三维触控可以更精确地记录用户手指的绝对位置,在相同条件下其精度比毫米波雷达更好。当然,电容感应型三维触控还是会需要一个屏幕,因此比起无需物理屏幕的Project Soli来说,电容感应型三维触控模组的体积会更大一些。目前,电容感应型三维触控模组已经进入商用阶段,由普林斯顿海归博士创立的珠海普林芯驰已经有独立知识产权的三维触控芯片模组问世,目前正在与美的、格兰仕等家电公司联合探索三维触控在智能家电领域的应用。让我们拭目以待三维触控领域中国力量的发展!
未来的触控市场趋势
根据前文的分析,我们可以看到Project Soli的近场三维手势识别方案的应用场景比较有限,对于触控市场的影响在未来几年内也并不会很大。我们预计,在手机等触控的存量市场,未来几年还是会以传统二维触控技术占主流,毕竟在手机等设备上目前还没有看到很强的三维手势识别和三维触控的需求,同时二维触控的交互已经非常成熟,用户体验很好。
但是,这并不意味着三维手势识别和三维触控不重要。在智能设备的增量市场,包括AR/VR、智能互动屏、智能家电等领域,传统的二维触控往往不再好用,而必须使用新的三维交互。根据目前技术成熟度和应用成熟度,我们预计基于计算机视觉和ToF/双目摄像头的远场三维手势识别将最先大规模落地,一方面因为远场三维手势识别在XBOX Kindle等应用中已经有不少积累,设计师对如何设计交互界面已经有一定心得;此外应用端的商场内智能大屏幕等应用正在快速找到能盈利的商业模式。在远场手势识别之后,我们预期近场三维手势识别和三维触控的成熟时机将取决于具体应用的落地速度,目前来看主要会用在智能家电上,但是使用三维交互究竟能提升多少用户体验目前来看还需要进一步努力才能看到。
-
谷歌
+关注
关注
27文章
6257浏览量
111945 -
触控技术
+关注
关注
24文章
635浏览量
87637 -
project
+关注
关注
0文章
35浏览量
13784
原文标题:谷歌Project Soli真能颠覆触控行业?
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
浮思特 | 敦泰内嵌式触控单芯片方案,让触控与显示更轻薄、更高效

浮思特 | 一颗内置MCU的触控芯片,看看敦泰 FT7401 的思路

嵌入式软件开发工具市场新动向:订阅制趋势下的中国开发者选择
全尺寸布局+瑞芯微强芯支撑,瑞迅触控一体机深度赋能行业智慧化应用

谷歌XR生态加速落地:Galaxy XR上线月入60+应用,Project Aura明年发售

Gemini AI 再进化:谷歌联合XREAL发布Project Aura, 打开“看见世界”的新能力


ICNL9951R芯片:重新定义触控与显示的完美融合
工业触控显示屏为智慧医疗行业注入新动力
智能触屏万用表的科技优势在哪
深耕行业18年,触控一体机品牌商瑞迅科技助力智能柜厂家提升产品竞争力
谷歌地图GPS定位
谷歌与大朋VR 聚焦AI 眼镜赛道,技术布局凸显行业新方向




评论