 助力ADAS的眼睛:超声波雷达系统
助力ADAS的眼睛:超声波雷达系统

自动泊车系统作为ADAS功能的重要组成部分被越来越多的使用。为了有效识别停车环境、安全可靠的完成自动泊车操作,一双精确、高效的“眼睛”--超声波雷达系统是必不可少的,下面和小编一起了解下吧。
倒车雷达在汽车上已经运用的很成熟,通过超声波探测检测车辆后方障碍物情况及具体,辅助驾驶员在在倒车过程中发生碰撞。目前随着ADAS—自动泊车应用的兴起,超声波雷达迎来了一次新的增长。从单纯的车辆尾部距离探测发展为车辆前后左右多方位探测,为自动泊车提供可靠、高精度的障碍物及距离探测。
1
超声波雷达方案
超声波雷达主要是通过变压器经探头向外发生超声波信号,通过检测返回的超声波信号时间及幅值进行障碍物判断及距离探测。在车载应用,控制驱动器完成超声波发送接收后,将所得到的数据信息通过车载总线上传至VCU控制器,控制进行逻辑层判断处理。
最基础的方案如图1所示,该方案也是应用较早的架构,适用于前装和后装市场。配合单独的MCU控制器,通过硬线束直连各探头的驱动控制芯片E524.09,控制器直接进行驱动控制及数据采集处理。最后将各探头数据收集整合后,通过车载总线CAN/LIN上传至BCM,或后装使用的显示终端。
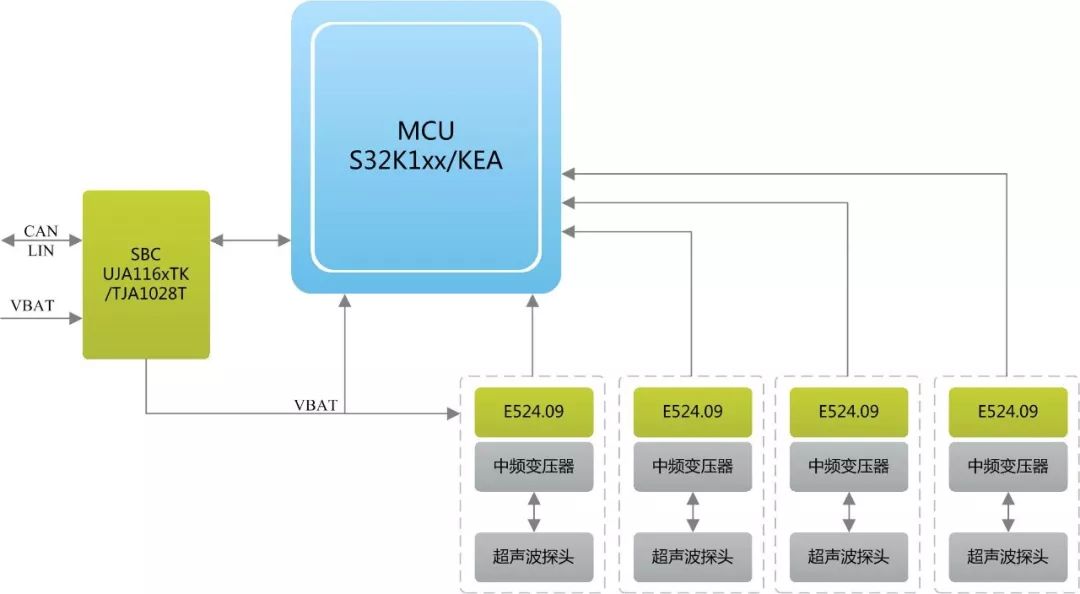
图 1
但在超声波探头较多的应用场合或大型车辆,探头位置分布较广。为此会带来较多的线束成本及装配问题。针对该问题,利用车载LIN网络架构方式进行优化,如图2所示。利用小型MCU及SBC或集成SOC芯片,配置超声波驱动控制芯片设计成独立超声波节点。MCU控制完成超声波探测后将数据进行前级处理,然后经过LIN总线上传至BCM或控制终端。该方案极大地减少了整个架构的线束使用,提高装配使用体验。
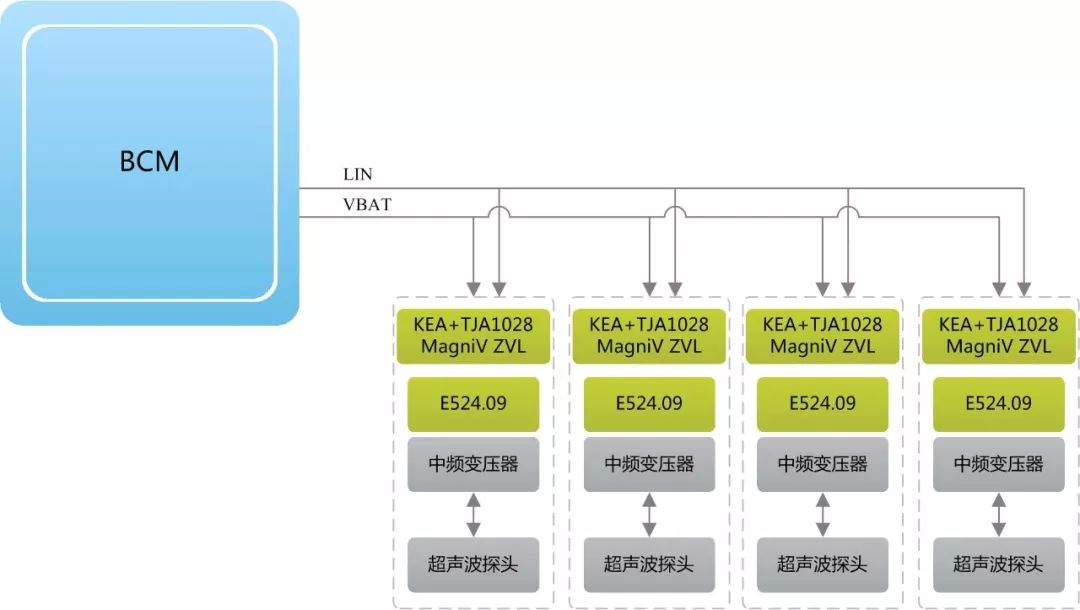
图 2
对于改善型方案,Elmos推出了直接单芯片SOC解决方案E524.14系列。E524.14芯片在原有超声波驱动控制功能的基础上集成了8位MCU,支持LIN Switch操作。针对原MCU+LIN+Driver的分立方案。
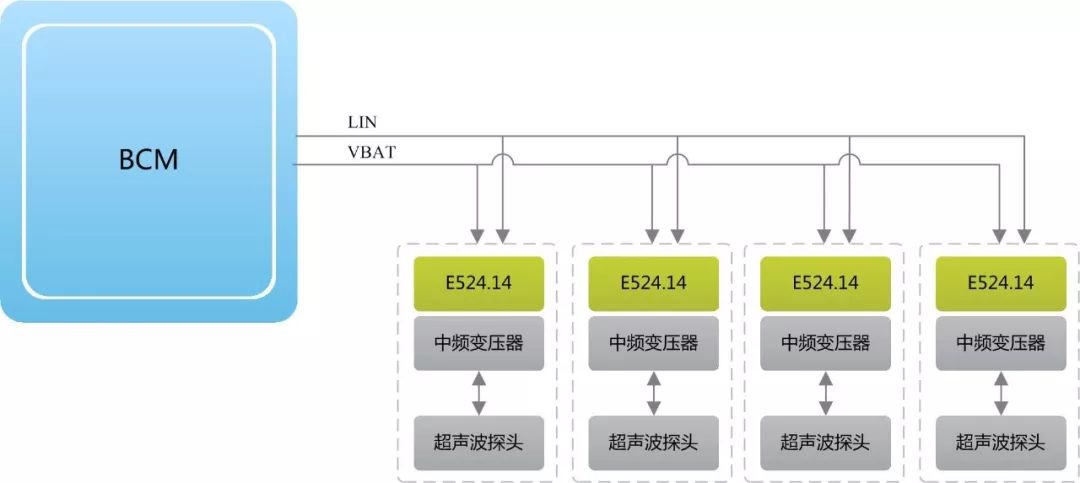
图 3
2
产品介绍
Elmos在超声波应用市场占有较高的份额,同时具有完善的产品系列及方案选型。
目前第二代超声波驱动控制芯片已经在新项目被使用,替换第一代产品。在超声波频段,探测距离等性能方面做了优化升级,如图4所示。
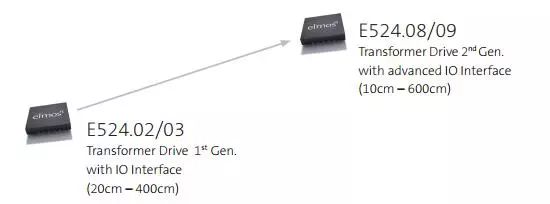
图 4
产品特性:
E524.08/09分别替换第一代两线及三线产品E524.02/03;
E524.08/09探测具体增加到10cm—600cm;
E524.08/09支持超声波频段扩展为30kHz~83kHz;
E524.08/09驱动电流增加到168mA~354mA。

图 5
产品特性:
E524.14集成8位MCU,8kByte FLASH or ROM / 512Byte SRAM / 128Byte EEPROM;
E524.14支持LIN 2.2,支持LIN Switch功能,可以进行从机地址分配;
E524.14配套有OTP版本E524.24降本方案。
-
超声波
+关注
关注
63文章
3325浏览量
146050 -
雷达
+关注
关注
52文章
3385浏览量
124499 -
adas
+关注
关注
311文章
2337浏览量
212111
原文标题:助力ADAS—自动泊车的“眼睛”
文章出处:【微信号:Zlgmcu7890,微信公众号:周立功单片机】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
智能驾驶的“感官系统”:超声波雷达、毫米波雷达与激光雷达的协同之道

超声波清洗机技术原理之详解

纳芯微:为什么超声波雷达是车载感知的近距离守护者?
超声波测距换能器:工业与生活中的测量利器
超声波清洗机是什么,它如何通过超声波振动来清洗物品?

超声波换能器:原理与多领域应用解析
超声波换能器:原理与多领域应用解析
超声波气泡换能器:工业生产的“隐形卫士”
超声波水下测距换能器:探索水下世界的“千里眼”
一文读懂超声波换能器:原理、应用与未来趋势
超声波换能器--声波世界的 “神奇魔法师”
超声波清洗机的作用是什么?使用超声波清洗机可以去除毛刺吗?

超声波清洗的原理是什么?超声波清洗是如何起作用的?

超声波频率和功率对在线式超声波清洗的影响如何?




评论