 美国IIHS发布了行人自动紧急制动系统的测试协议首版
美国IIHS发布了行人自动紧急制动系统的测试协议首版
2018年12月,美国IIHS发布了行人自动紧急制动系统的测试协议首版,协议描述了用于评估客运车辆上行人自动紧急制动(PAEB)系统的测试程序。
该系统类似于已记录的帮助驾驶员避免与行人发生碰撞的系统(Highway Loss Data Institute, 2018),协议可从IIHS网站的技术协议部分获得。
继FCW、AEB后,美国NCAP的评级系统,又向前迈了一步,评级内容的发展节奏,同前辈Euro NCAP一样。
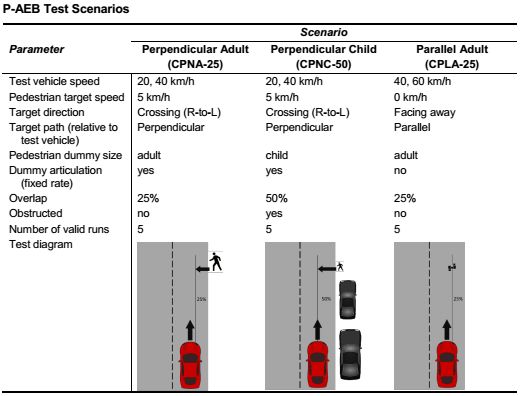
此次P-AEB测试的场景,主要包括以下三类:
1)在车辆行进的路上,成年人垂直交叉而过;
2)在车辆行进的路上,同向并行行驶的车辆遮挡了交叉穿越马路而过的儿童;
3)在车辆行驶的路上,车旁的马路边有成年人步行而过。
评级是基于测试车辆在20公里/小时和40公里/小时(垂直路径场景),以及40公里/小时和60公里/小时(平行路径场景)避免或减轻行人模拟碰撞的能力。
此次公布的测试细节,与此前IIHS同OEM商议的,大抵相同。
测试前准备
测试必须使用新车辆在“收到”条件下进行,里程表上显示的累计里程在200至5000英里之间。测试车辆的轮胎胎压、油量、以及载荷也有相应的要求,保持在标准范围内,减少对车辆测试的影响。
测试前,车辆将以56公里/小时(35英里/小时)的速度进行10次减速,平均减速约0.5至0.6 g。
紧接着在56公里/小时的一系列停车之后,将以72公里/小时(45英里/小时)的速度进行三次额外的停车,并提供足够的制动踏板力,以激活车辆的防抱死制动系统(ABS),使其在每次停车的大部分时间发挥作用。
以下是72公里/小时停车,车辆将以72公里/小时(45英里/小时)的速度行驶5分钟,以冷却刹车。
如果在测试过程中的任何时刻,测试车辆保持静止的时间超过15分钟,则必须以72公里/小时(45英里/小时)的速度进行一系列的三次制动停止,以预热刹车。这些站点的纵向减速应该大约为0.7 g。
在测试期间,从最后一次热身结束到有效测试试验开始,以及/或从每次单独测试运行结束之间,至少需要3分钟。
测试车辆将配备牛津科技公司的RT-Range惯性和GPS导航系统,用于测量和记录速度、纵向和横向加速度、纵向和横向位置、偏航率和碰撞时间。这些数据将以100赫兹的频率采样和记录。
Racelogic Video VBOX Pro将用于从Oxford RT-Range获得的数据叠加到使用30 FPS摄像机录制的视频上,一台相机的位置与司机面向外前挡风玻璃的视野相同。其他摄像机可用于验证碰撞和记录前向碰撞警告(FCW)。
P-AEB测试前一些车辆需要较短的初始化时间。在此期间,进行诊断以验证功能和传感器校准。如果需要系统初始化,IIHS将从车辆制造商获得并执行适当的过程。
P-AEB和/或FCW系统在车辆制动时间和报警应用上有不同的车内设置时,将被设置为中间设置,如果没有中间设置,则设置为后面的设置。
测试中注意事项
在测试过程中,除测试场景中规定的车辆、障碍物或物体外,其他车辆、障碍物或物体不得在测试车道两侧3米范围内或距离测试目标25米的纵向距离内。车道内的架空标志、桥梁、龙门或其他重要结构必须大于离地5米。
行人目标速度将由4activeSB单元控制,成年人和儿童的模拟目标将以5±0.2 km/h(考虑了一般人的步行速度)的速度垂直测试车辆的行驶路线交叉而过。行人目标将旅行在5±0.2 km / h(被认为是运行速度)垂直子场景。
在平行的场景中,行人的模型是静止的。运动目标必须从起始位置加速到1米以内的测试速度,并在达到碰撞/零点前至少达到2米的稳态速度。
成年行人目标将定位在道路中心线距离车辆4 m的位置,垂直于行驶路径的测试车,穿越从从右到左的车道,当测试车辆靠近目标左侧时,车辆前25%的部分就会正好在目标碰撞临界点交叉中心线的位置。
针对儿童目标测试的时候,测试车辆位置略有不同,车头前方是50%的部分与目标正好交叉。与此同时,另外两辆测试车辆也会同向行驶,模拟目标被遮挡视野的场景。平行测试中,行人与测试车辆相向而行,二者交叉重叠部分与第一个测试一样,车头25%。
测试分别在20公里/小时和40公里/小时(垂直成人和垂直儿童场景)和40公里/小时和60公里/小时(平行成人场景)进行。在每个测试速度下,试验将总共执行5次,总体速度降低将根据所有5次测试运行的平均值计算。
每次试验开始时,试验车从目标开始移动150 - 200米,并逐渐向目标加速。对于20公里/小时、40公里/小时和60公里/小时的测试,接近阶段分别在目标之前25米、50米和75米(相当于大约4.5秒TTC)开始。接近阶段在测试车辆撞击目标时结束,或测试车辆在撞击目标前停止。
在接近阶段,司机需要遵守一定的行为规范:
1)调节油门使用平稳的输入,以保持公称测试速度;
2)使用最少的转向输入,以保持测试车辆在车道中心;
3)避免使用突然转向输入或校正;
4)不要碰刹车踏板。
同时为了让测试被认为是有效的,在接近阶段必须满足以下标准,直到与目标碰撞或启动自动制动:车辆速度必须保持在±1.0 km / h的名义测试速度,偏航率的范围内必须保持±1°/ s,横向中心线之间的距离测试车辆相对于车道中心线必须不超过±0.1米。当车辆纵向减速达到0.5 m/s2时,视为自动紧急制动开始。
最终评分标准
碰撞点是用Oxford系统测量的,并定义了测试车辆第一次接触行人目标的时间和地点。可以使用摄像机或磁带开关来验证冲击。在每个测试场景之前,在测试车辆和目标对齐并接触到碰撞位置时,会建立一个零点。
速度降低是通过在自动紧急制动启动前,将碰撞时的测试车辆速度与测试车辆速度相减来计算的。自动制动启动前的试验车辆速度按自动应急制动启动前0.1秒的平均速度计算。如果试验车辆没有接触目标,则认为碰撞速度为零。
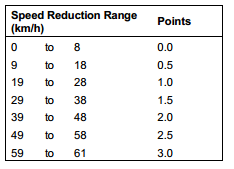
根据每个测试场景中每个速度下5次测试运行的平均速度降低值,依据一个表获得打分。在5次60公里/小时的平行行驶中,平均FCW时间大于或等于2.1秒的车辆也可获得1分。也有FCW会得不到分数。
评分过程中将使用两个权重因子:70%在垂直的分值上,30%在平行的分值上。每个加权运算的乘积四舍五入到十分之一,总分是两个加权子分数之和。
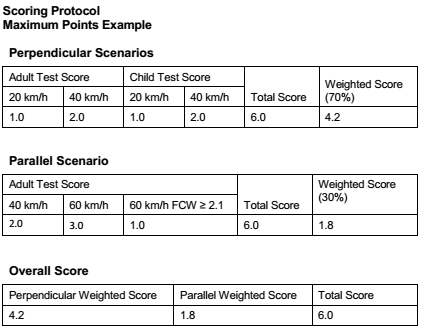
图:最高得分示例
最终,P-AEB的评分结果将会分为四个等级:差(No Credit,得分<1分),及格(Basic,1≤得分<3分),良(3≤得分<5分),优(得分≥5分)。
-
传感器
+关注
关注
2550文章
51026浏览量
753004 -
导航系统
+关注
关注
2文章
264浏览量
30701 -
制动系统
+关注
关注
0文章
126浏览量
15810
原文标题:美版P-AEB新鲜出炉,该来的都会来 | GGAI头条
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

汽车制动系统对安全性的影响
汽车制动系统原理解析 如何检查汽车制动系统
气压制动系统制动不良的原因
利用仿真技术进行智能制动系统的开发
英飞凌推出新一代CMOS级联雷达
汽车ABS系统工作模式有哪些
Arbe感知雷达技术赋能汽车驾驶安全
哪吒GT推送第五次OTA升级,新增32项功能,优化97项体验
传感器性能大考验!美国启动AEB紧急制动计划
AEB安全性受关注,高速工况AEB何时能成为标配?
智行者联合清华完成国内首套全栈式端到端自动驾驶系统的开放道路测试

理性看待AEB自动紧急刹车系统设计






 工商网监
工商网监
评论