 浅析RV减速器和谐波减速器的区别
浅析RV减速器和谐波减速器的区别
作为核心零部件的重要组成,精密减速器是工业机器人可靠、精确运行所不可或缺的部分。而事实上,减速器有多种类别,分别是谐波齿轮减速器、摆线针轮行星减速器、RV减速器、精密行星减速器和滤波齿轮减速器。
作为工业机器人核心零部件的精密减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。精密减速器使机器人伺服电机在一个合适的速度下运转,并精确地将转速降到工业机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。
大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。一般将RV减速器放置在机座、大臂、肩部等重负载的位置,即主要用于20公斤以上的机器人关节;而将谐波减速器放置在小臂、腕部或手部,即20公斤以下机器人关节。另外,行星减速器一般用在直角坐标机器人上。
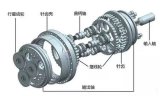
RV-E型减速器
那么,两类减速器的原理和优劣势到底是什么呢?
浙江来福谐波传动股份有限公司张杰解释,谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成。柔轮的外径略小于刚轮的内径,通常柔轮比刚轮少2个齿。波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面。波发生器转动的过程中,柔轮和刚轮齿接触部分开始啮合。波发生器每正时针旋转180°,柔轮就相当于刚轮逆时针旋转1个齿数差。在180°对称的两处,全部齿数的30%以上同时啮合,这也造就了其高转矩传送。
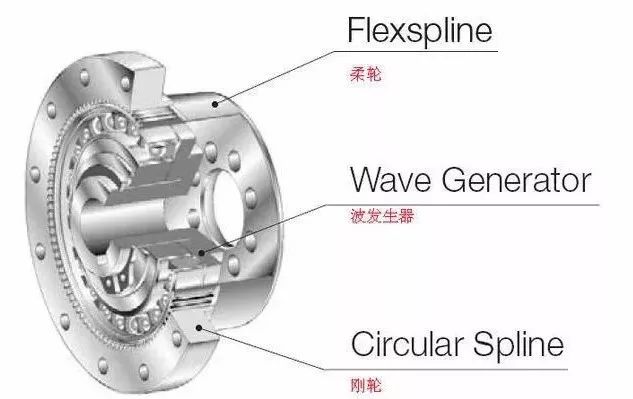
谐波减速器
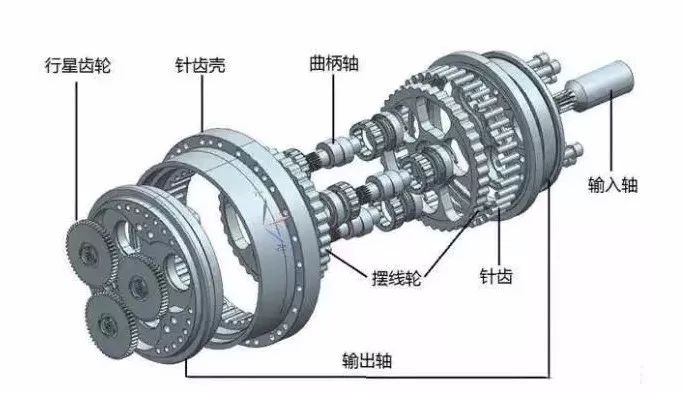
张杰认为,相比谐波减速器,RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,还具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
RV减速机的关键在于加工工艺和装配工艺。RV减速机具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。
据悉,RV减速器是由摆线针轮和行星支架组成,以其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大等诸多优点被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域,日益受到国内外的广泛关注。
浙江双环传动机械股份有限公司张靖博士进一步分析了RV减速器和谐波减速器两者的优劣势。他认为谐波减速器结构简单紧凑,适合于小型化、低、中载荷的应用。RV刚性好、抗冲击能力强、传动平稳、精度高,适合中、重载荷的应用,但RV减速器需要传递很大的扭矩,承受很大的过载冲击,保证预期的工作寿命,因而在设计上使用了相对复杂的过定位结构,制造工艺和成本控制难度较大。
综上可见,看似简单的减速器,实则是对我国工业基础系统的挑战。没有吃透相关材料、热处理、工艺的情况下,很难生产出完全满足机器人要求的精密减速器实属意料之内。
-
工业机器人
+关注
关注
91文章
3406浏览量
93259 -
减速器
+关注
关注
7文章
402浏览量
23559
原文标题:工业机器人的RV减速器和谐波减速器对比分析
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
跪求谐波减速器的厂家
工业机器人的Rv减速器和谐波减速器对比分析
RV减速器和谐波减速器的对比分析
RV减速器和谐波减速器两者的优劣势
工业机器人的Rv减速器和谐波减速器有什么区别
工业机器人的RV减速器和谐波减速器有什么区别?

减速器和精密减速器的区别
谐波减速器和RV减速器的区别
谐波减速器的工作原理 谐波减速器和RV减速器的区别
RV减速器和谐波减速器的原理和优劣势





 工商网监
工商网监
评论