 8位微控制器的多功能性与工业照明中的应用
8位微控制器的多功能性与工业照明中的应用

许多人认为价格合理的16位和32位微控制器的增长可能会导致8位MCU的终结。然而,近年来,由于M2M型应用的普及,推动了8位产品的理想用途。随着物联网预计在未来几年迅速增长,8位产品似乎可以找到越来越多的市场。
这种复兴令人兴奋的是8位部件的多功能性。无论应用是什么,如果需要少量处理能力,可以有一个8位单元来满足要求。物联网注定要在网络边缘看到对此类处理的更多要求,其中设备很小但任务同样重要。这是8位微控制器蓬勃发展的完美环境。
示例和应用程序本文将介绍三个非常不同的示例,这些示例展示了8位微控制器的这种多功能性。在第一种情况下,它将研究STMicroelectronics的STM8S207如何提供形成智能卡接口所需的解码。然后,本文将展示Microchip的PIC16F1947如何帮助控制商业和工业建筑中的照明。最后,本文将考虑Atmel ATTiny20微控制器如何在智能手机和其他无线设备中提供接近传感器所需的处理。
智能卡接口
使用STMicroelectronics的STM8S207的智能卡模式,可以开发基于智能卡的应用程序,使用减少的固件和硬件资源。 STM8S207是一款24 MHz 8位MCU,具有高达128 kby的闪存,集成EEPROM,10位模数转换器,定时器和两个UART,具有SPI,I²C和CAN接口。
该应用程序使用设备的UART1智能卡模式,该模式支持ISO 7816-3 A类中描述的异步协议智能卡,其中包括工作在5 V的卡;工作在3 V的设备被归类为B类,而1.8 V的设备则归类为C类。该标准描述了智能卡和读卡器之间的关系,指的是智能卡本身,而主设备指的是读卡器。通信开始由读卡器发信号通知智能卡,并在智能卡响应时继续。通信通道是单线程的,因为一旦读取器向智能卡发送命令,它就会被阻塞,直到收到响应。
启用智能卡模式后,UART1必须配置为8个数据位加奇偶校验和0.5或1.5个停止位。 5位预分频器和智能卡时钟发生器为智能卡提供时钟。 GPIO引脚和软件提供了与智能卡接口所需的其余功能。
ISO 7816-3以基本时间单位(ETU)定义了异步协议的位定时器。这些与输入卡的时钟频率有关。 ETU的长度是一点时间。 UART1发送器输出和接收器输入在内部连接。要将数据从STM8S207传输到智能卡,必须在智能卡模式下设置UART1。
智能卡时钟发生器为连接的智能卡提供时钟信号。智能卡使用此时钟为智能卡和另一个UART1之间的串行I/O获取波特率时钟。时钟也用于卡中的CPU(如果存在)。智能卡接口的操作要求在卡中的CPU运行代码时调整卡的时钟速率,以便可以改变波特率或增加卡的性能。时钟用作智能卡的CPU时钟,因此微控制器时钟速率的更新必须与智能卡时钟同步。时钟高或低脉冲宽度不得短于旧的或新的编程值。
3和5 V智能卡需要模拟接口。在此应用中,ST8024用于此目的,并放置在智能卡和STM8S207之间。该接口如图1所示。
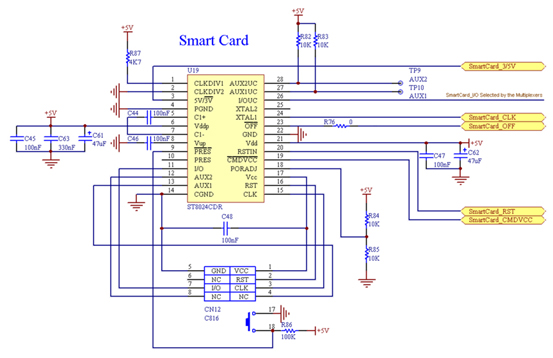
图1:智能卡接口硬件连接。
通过查看奇偶校验位对每个字节执行错误处理。如果这与传输数据的奇偶校验不对应,则必定发生错误。接收方将发出信号,表示它希望重新传输该字节。这是通过将I/O线保持为低电平而不是正常高电平来完成的。当发送方检测到这一点时,它重新发送该字节。通过从卡发送到读卡器的数据,STM8S207可以通过在停止位期间下拉数据线来检测硬件接收数据的奇偶校验错误。利用从读卡器发送到卡的数据,智能卡下拉I/O线以发出奇偶校验已发生的信号。在这种情况下,STM8S207通过软件检测到帧错误。智能卡库检查是否发生了奇偶校验错误,如果是,则对其进行管理在从微控制器向卡发送一个字节后,智能卡捕获在I/O线上发送的数据。如果从卡中检测到奇偶校验错误,则在停止位期间下拉I/O线。发生帧错误事件,并且错误处理功能重新发送最后一个数据。
当卡首次插入读卡器时,电源不会应用于触点,因为如果电源通过错误的触点,卡的芯片可能会损坏。只有在边缘检测器确定卡与接触点正确对齐后才会启动电源。然后,在将复位信号发送到卡之前,使触点进入相干空闲状态。尽管有些微处理器在I/O状态下工作在3 V,但始终会施加5 V的初始电压设置。 I/O触点在阅读器侧设置为接收模式,并应用稳定时钟。复位线处于低电平状态,在读取器启动有效复位序列之前,复位线必须保持至少40,000个时钟周期,从而将复位线提升到高电平状态。读卡器和卡之间的数据传输通过时钟和I/O线的协同作用进行。
工业和商业照明控制
寻找控制商业和工业建筑照明的标准方法导致了在欧洲创建DALI - 数字可寻址照明接口。这是用于形成照明控制网络的开放标准,作为建筑物自动化系统的一部分。典型的DALI网络由控制器和各种照明设备组成,例如电子镇流器和调光器。控制器通过双向数据交换监视和控制每个灯.DALI型镇流器可以比标准电感镇流器运行更低的功率水平,因此对工业和商业领域的技术感兴趣。
通过双线串行总线,控制器发送16位曼彻斯特编码数据包,镇流器使用8位数据包进行响应。系统中可以有多个控制器,并且有64个通道(单独地址)用于连接到一个接口线的镇流器。
与模拟系统不同,DALI不需要硬连线电源电路控制组。单个镇流器寻址与数字开关的组合消除了垂直开关布线。 DALI有自由形式的布局。允许使用菊花链,星形拓扑和多点放大,以及两个或多个拓扑结构的组合。
DALI的物理低电平或有源状态定义为接口电压低于9.5 V.高电平条件或DALI空闲,是9.5和22.5 V之间的接口电压,最常见的是16 V.最大系统电流限制在250 mA。限流器电路的响应时间小于10μs。连接到接口的每个组件最多可消耗2 mA。连接器在接收器处是非极化的。 DALI通常与微控制器光学隔离,数据传输速率为1200 bit/s。微控制器可以是8位单元,例如Microchip的PIC16F1947。没有关于如何实现DALI电路设计的规范或建议,但图2所示的光隔离电路将PIC16F1947与DALI总线连接。
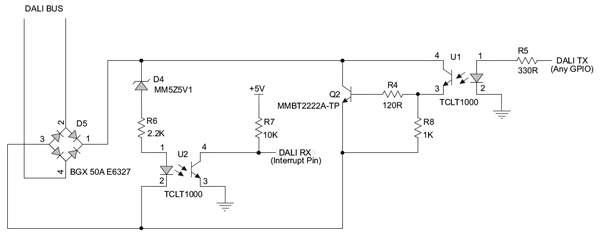
图2:隔离通信电路图。
PIC16F1947是一款基于64引脚闪存的8位CMOS微控制器。 RISC CPU只有49条指令需要学习。工作速度为DC至32 MHz,DC至125 ns指令周期。待机电流在1.8 V时通常为60 nA,工作电流在32 kHz,1.8 V时通常为7.0μA。
DALI使用曼彻斯特(双相)编码发送起始位和信息位。信息速率为1200 bit/s,可接受的范围为±10%。一位时间是833.33μs。最高位(MSB)首先发送出去。在控制设备和控制设备之间发送的任何分组都是双相编码分组。然后对分组进行解码,并相应地处理地址和消息。这里讨论的照明通信板有一个PIC16F1947微控制器单元以及一个隔离的DALI通信电路接口和一个简单的电源。由于来自DALI总线的信号被光耦合器反相,PIC单片机会查看曼彻斯特编码和解码以下列方式:曼彻斯特码是一种数字编码格式,其中符号‘1’由下降沿(高后跟低)表示,符号‘0’由上升沿(低后跟高)表示)。高脉冲和低脉冲都具有相等的宽度,等于位周期的一半。使用定时器对传出消息进行编码,并使用其中一个引脚发送数据包。每隔416.67μs或半位时间使用定时器产生中断,这是信号相位需要改变的地方。如果它发送一个‘1’作为该位,则前半部分为‘1’,并且在中断时信号反转,反之亦然。结果,输出是曼彻斯特编码的分组,如果由控制设备发送则准备由控制装置解码,或者如果作为控制装置的响应发送回控制装置则由控制装置解码。 br》解码更复杂。当接收开始时,接收器,无论是控制设备还是控制设备,确保从开始位开始接收整个数据包,然后是8位或16位消息,最后至少两个空闲表示停止位。使用PIC16F1947上的外部中断引脚完成解码。该引脚专门用于在每次输入信号的相位发生变化时产生中断。定时器用于每3/4位产生一次中断,因此在该点测量该值,并确定该位是“0”还是“1”。当外部中断发生时,定时器复位并在该位的中间重新加载,并且由于漂移检查而保持错误。
这个DALI电路具有简化的电源和通过PIC16F1947实现的曼彻斯特编码通信为控制装置和控制装置实施DALI调试和指令的基础。
射频能量的接近感应
智能手机和其他无线设备使用增加的持续影响之一是担心人体对射频(RF)能量增加的健康损害。随着基于无线的M2M设备数量的增长,这些担忧可能会增加。因此,各种电信机构对他们认为安全暴露于射频能量的东西设定了限制。这些限制被称为比吸收率(SAR),其是使用RF装置时身体吸收的RF能量的量。制造商必须遵守这些限制。设备必须在接近或接触人体时降低设备的RF输出。该应用在电路中使用Atmel TinyAVR器件来检测器件是否靠近用户。
Atmel ATTiny20是一个基于8位AVR RISC的微控制器,它结合了2 KB的ISP闪存,128字节的SRAM,12通用I/O线,16个通用工作寄存器,带2个PWM通道的8位定时器计数器,带2个PWM通道的16位定时器计数器,内部和外部中断,以及8通道10位数模数转换器。此外,该器件还包括一个带内部振荡器的可编程看门狗定时器,一个从属双线接口,一个主从串行外设接口,一个内部校准振荡器和四个软件可选择的省电模式。该器件工作在1.8和5.5 V之间。通过在单个时钟周期内执行指令,器件实现了接近1 MIPS/MHz的吞吐量,平衡功耗和处理速度。
各种材料可用于形成接近传感器,最简单的是一块铜带或几厘米的电线。传感器需要尽可能靠近设备表面放置在与用户接触的位置。对于智能手机,这将是靠近耳机的屏幕侧。它还需要远离金属结构部件和大面积的地面,因为这会降低灵敏度。来自平盘传感器的电场以直角均匀地从传感器的两侧投射。顶部和底部表面对进入场地的物体同样敏感,但如果需要减小一个方向的灵敏度,则可以在该侧使用网格填充的地平面。
传感器的形状不是重要。在该示例中,使用矩形铜带传感器。它高约8毫米,长25毫米,安装在1毫米厚的聚碳酸酯底部,然后安装在支座上,以便与桌面隔离。电场的大小和灵敏度受传感器尺寸的影响;传感器越大,磁场越大,灵敏度越高。较大的传感器虽然需要更长的时间来充电,但却增加了功耗和响应时间。但是,在智能手机和其他无线设备的情况下,设备的大小将受可用空间的限制。用于开发和调谐电容式接近感应系统的单通道接近传感器设计如图3所示。
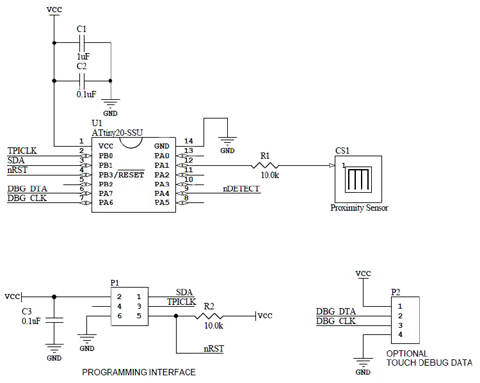
图3:电容式接近感应系统。
此设计基于Atmel ATTiny20 MCU,提供器件编程和触摸系统调试数据的标题,以简化接近传感器调整。接近传感器通过10kΩ串联电阻连接到端口引脚。固件来自Atmel的免费QTouch库,该库为公司的大多数MCU提供传感器支持。
结论
越来越多连接设备的普及已经并且仍在为使用8位微控制器提供机会。随着物联网革命的继续,小型设备的边缘将需要处理能力。通常所需的处理远低于16位和32位器件的能力,并且预计会出现使用8位微控制器的复兴。本文给出了这些单元部署方式的三个截然不同的例子,显示了在未来几年内可以证明非常宝贵的多功能性。
-
传感器
+关注
关注
2577文章
55483浏览量
793828 -
智能手机
+关注
关注
66文章
18700浏览量
186281 -
控制器
+关注
关注
114文章
17871浏览量
195066
发布评论请先 登录
TMS370Cx4x 8位微控制器:功能特性与应用解析
解析COP8CBE9/CCE9/CDE9:多功能8位CMOS闪存微控制器
深入解析COP8SA系列8位CMOS微控制器
RX71M Group微控制器:高性能与多功能的完美融合
T8xC5121 8 位微控制器:特性、功能与应用全解析
深入解析AT43USB325:多功能8位微控制器的技术探秘
Z8 Encore! XP® F0822系列微控制器:高性能8位解决方案
探索Zilog Z8 Encore! XP F0823系列高性能8位微控制器
CMOS Super8 ROMLESS MCU:8位微控制器的新选择
RA6E1微控制器:高性能与多功能的完美融合
RA8E2微控制器:高性能与多功能的完美结合
Infineon XMC1400 AA-Step微控制器:工业应用的理想之选
不止于照明,BLE Mesh如何赋能照明系统化身多功能“管家”?

MAX32670高可靠性、超低功耗微控制器技术手册



评论