 两种现代传感器协议解决汽车行业的通信问题
两种现代传感器协议解决汽车行业的通信问题

当传感器距离MCU一定距离时,通信成为一个问题。汽车行业开发的两种现代传感器协议解决了这些问题并更好地利用了新的传感器IC拓扑结构。自传感器早期以来,报告传感器信号的问题一直存在。实际上,如果无法显示,传达或共享信息,则无法检测参数。
最初,信号的机械和局部报告或多或少。例如,波登压力计(压力计)通过连接到管子的移动箭头直接报告测量的压力,并指向附在框架上的刻度。水银温度计通过水银柱的长度报告检测到的温度。但是,为了远程处理信息或在闭环系统(传感器和控制)中使用传感器,必须获得感应电信号形式的信息。从这个角度来看,在前面提到的压力表中增加了一个机电转换器,以实现带或不带局部信号调节的真实传感器。
其他类型的传感器具有可以直接电加工的输出。例如,热敏电阻是电阻随温度变化的电阻。由于施加的压力,压阻式应变计的电阻随应变而变化。这些可变电阻器被引入惠斯通电桥中,提供通常在进一步传输之前进行局部调节的电压。用作角位置传感器或可变磁阻磁传感器的旋转电位计(电阻分压器)用作旋转速度传感器,直接传输输出电压而无需特定的信号调节。
直到最近,由于其性质在传感元件和信号调节技术中,报告的信号是模拟电压,通常(但不总是)与施加到传感器的实际电源电压成比例。这对于带有或不带信号调理的分立式传感器以及集成有源传感器都是有效的。自20世纪90年代中期以来,该行业已经转向数字通信,以及智能CMOS传感IC的出现 - 芯片数字信号处理加速了这种迁移。本文介绍了从最初的步骤和动机到最新进展的转变,重点是独立传感器和控制单元之间的点对点通信。
模拟输出协议
鉴于内在性质在传感元件和相关的模拟信号调理电路中,模拟输出电压已被用作传感器和电子控制单元(ECU)之间的初始和最逻辑的报告方法,其中信号与其他数据组合以进行进一步处理。 br》
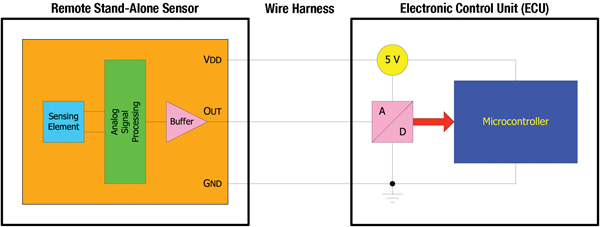
图1:点对点通信传感器ECU的模拟输出。
如图1所示,模拟输出通过ADC在ECU侧转换使用相同的源偏置,为传感器提供电源电压。这就是模拟输出电压的比例要求的原因。也就是说,对于给定的传感器信号,例如压力或位置,输出电压VOUT与电源电压VDD成比例,因此VOUT/VDD =恒定。这样,输出电平以VDD百分比表示,电源电压变化不会影响ADC之外的数字化信号。电气编码信号,例如电流环4至20 mA(绝对值),可视为模拟输出电压概念的扩展。
数字输出协议 - 脉冲宽度调制
最简单的移动单条信号线上的模拟输出到数字输出是将模拟电平转换为给定频率和占空比的数字信号,其中
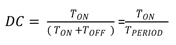
与传感器信号成比例(见图2)。
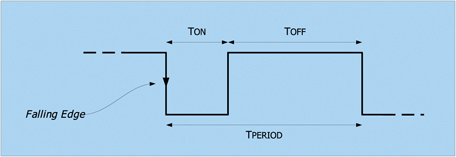
图2:PWM占空比定义。
编码通常通过比较模拟信号和所需频率的参考锯齿信号来完成(见图3)。解码在ECU侧通过定时器I/O完成。
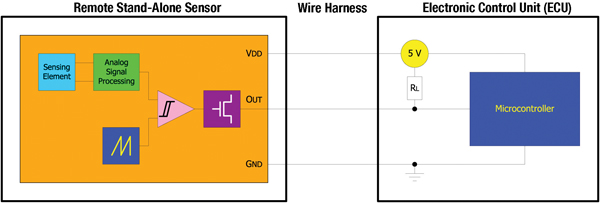
图3:用于点对点通信传感器ECU的PWM。
物理层是数字驱动器,低侧(开漏),高侧(开漏)或推挽式。后者对于更好的EMC,尤其是传导和辐射发射以及抖动/噪声性能是优选的。高侧/低侧驱动器方案需要在下降沿或上升沿进行斜率控制以获得最佳性能。
脉冲宽度调制(PWM)信号通常独立于电源电压,因此,此协议在操作时是首选必须保证在很大的电源电压范围内。 PWM也适用于双线接口,其中低和高数字电平被编码为电源电流的变化(IDD_LO和IDD_HI),并且可以仅使用电源和接地连接与ECU共享信息。
备用数字输出协议 - 动机
尽管PWM的普及,但由于传统和兼容性原因,模拟协议仍然非常流行。然而,现代智能传感器(见图4)通常具有DSP内核,由于技术原因在较低电源电压下工作,而不是复杂的模拟信号处理(ASP)电路。因此,通过DAC和缓冲器将数字信号转换回模拟域,在这些传感器上获得比率模拟输出电压。数字界面绝对更自然。此外,采用最先进微控制器的现代ECU也可以通过远程传感器的直接数字接口而不是通过ADC获益。
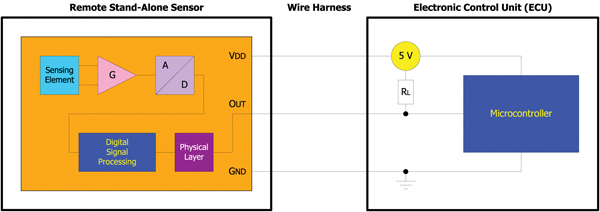
图4:现代点对点通信传感器ECU的备用数字输出。通过实现数字计数器和数字比较器,可以按照图4中提到的拓扑结构轻松实现PWM。然而,PWM具有一些限制,这些限制对于许多应用来说是不再可接受的,尤其是在稍高速度下的真实分辨率。相反,1 kHz的10位通常被认为是一个现实的规范。超过1 kHz,分辨率迅速下降。此外,PWM协议在报告诊断或状态信息方面非常有限。
为了反映新的传感器IC拓扑结构以及系统在数据内容,分辨率,响应时间,延迟时间,准确度和诊断方面的需求,新协议用于传感器之间的点对点通信,并且已经开发出ECU。在这种背景下,汽车世界采用了SENT和PSI-5。
数字输出协议 - 单边半字节传输
单边半字节传输(SENT)协议由通用汽车动力总成部门和几个然后由汽车电子学会的工作组根据参考J2716开发。
如前所述,SENT协议试图使各种类型的远程传感器之间的接口现代化和标准化,例如位置,压力,质量气流和温度,以及发动机管理系统ECU。
SENT协议(见图5)实际上可以视为增强型PWM。实际上,电报由八个半字节(1个半字节= 4个比特)组成,它们以PWM方式进行时间编码(即不进行占空比)。在报文开始时生成第一个脉冲(同步)作为后续半字节的时间参考。
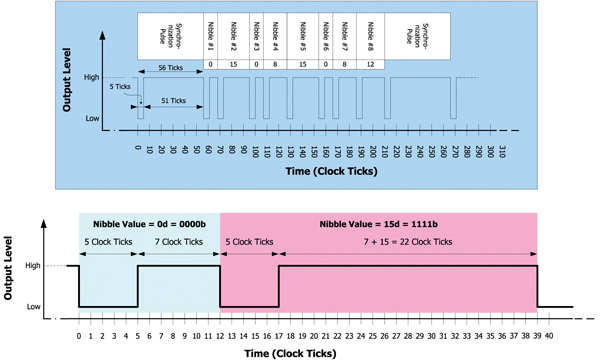
图5:SENT报文定义。
最长的消息小于1毫秒并传输32位,其中最多24位(六个半字节)专用于数据(半字节#2 。..#7)。剩余的两个半字节被分配用于报告状态和通信(半字节#1)和CRC(校验和 - 半字节#8)。
24位数据可用于报告2×12位信息,例如两个位置,位置和速度,压力和温度,位置和时间戳。状态半字节可用于报告诊断信息并有助于改善整个系统的安全性。为了进一步增加传感器和ECU之间传输的数据内容,可以使用状态和通信半字节以较低的速度报告分布在多个连续电报上的串行消息。
SENT协议是首先用于动力总成应用,例如位置传感器和压力传感器,但它也用于转向传感器(转向角,转向扭矩)。它应该在其他汽车(机箱)和非汽车应用中变得流行。
已经提出了一些SENT协议的衍生物,例如短PWM代码,它类似于SENT但允许同步机制和更短的传输时间,由于实际报告的半字节数量的灵活性。
数字输出协议 - 外围传感器接口
外围传感器接口PSI-5是PAS-4(PANAMSAT 4)的后续产品在安全应用方面已有十多年的历史,例如安全气囊系统的加速计传感器。 PSI-5概念的许多方面,例如坚固性和可靠性,已在该领域得到成功验证。 PSI-5由Autoliv,Bosch和Continental推动。
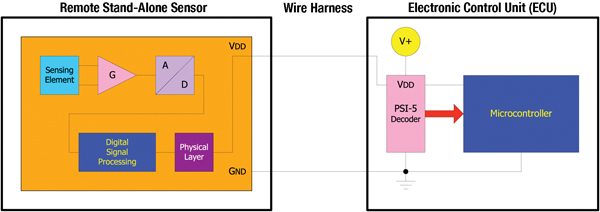
图6:PSI-5双线数字接口传感器ECU。
PSI-5的物理层(见图6)是双线接口。位模式在IC吸收的标称电源电流的顶部以电流脉冲传输(见图7)。这使得PSI-5在传导和辐射发射的EMC方面具有明显的优势。此外,数据速率可以达到250 K位/秒,延迟时间短。
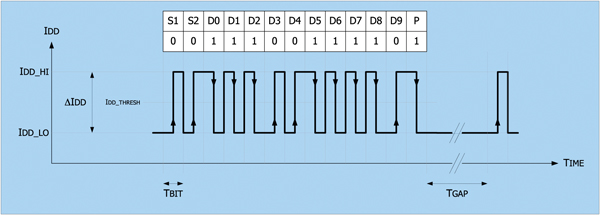
图7:PSI-5电报定义。
最后但不是至少,PSI-5非常灵活,它指定了同步和异步模式以及多个多从总线架构。 PSI-5也可以实现为双向接口。
实现开销有限但通常需要专用的接收器IC来转换信号输入电压并解码内容。
低级别(IDD_LO)表示通过传感器的正常(静态)电流消耗。通过传感器的增加的电流吸收(ΔIDD)产生高电平(IDD_HI)。在接收器内检测电流调制。
曼彻斯特编码用于数据传输。逻辑“0”由上升斜率表示,逻辑“1”由TBIT中间的电源电流IDD的下降斜率表示。
对于10位数据,基本电报通常为13位长(D0- D9)+ 2起始位(S1-S2)+ 1奇偶校验位(P-偶校验)。但是,可以使用两个连续的消息来传输16位数据。这可以通过诊断信息和纠错信息进一步扩展。
PSI-5已经在安全和转向应用中找到了应用,例如,控制转向扭矩。目前正在开发一个专注于车辆动力学应用的子标准。
其他数字输出协议
其他数字协议可用,但不适用于传感器和ECU之间的点对点通信。 》 SPI总线通常用于嵌入式系统,其中传感器直接向位于相同模块或系统中的微距离的微控制器报告。三个或四个必要的连接是PCB轨道,这是SPI通信可接受的。对于远程独立传感器,由于成本和稳健性原因,SPI不可接受。
CAN,LIN或I²C等总线协议本质上是为网络而非点对点通信而开发的。实施开销不可忽略,特别是对于CAN。
结论
远程传感器和ECU之间的模拟通信最终会失效。随着传感器和控制单元的现代化,数字时代将很快占据主导地位。但是,这只会由于具有丰富数据和诊断内容的强大而可靠的协议(例如SENT和PSI-5)而发生。
-
传感器
+关注
关注
2577文章
55445浏览量
793733 -
汽车电子
+关注
关注
3046文章
9086浏览量
173110 -
通信
+关注
关注
18文章
6445浏览量
140243
发布评论请先 登录
什么是协议分析仪和训练器
传感器是发展汽车行业的关键
虚拟仪器在汽车行业检测的应用
速度传感器在列车行业上有什么应用
四元数数控:深圳机器视觉在汽车行业中有什么应用?

VR技术与汽车行业的结合给汽车行业带来什么影响
虹科CiA演讲回顾 | CAN(FD)总线协议转换原理及其在汽车行业的应用



评论