 线性伺服电机定位系统简化安全摄像机定位设计
线性伺服电机定位系统简化安全摄像机定位设计
全球范围内的安全和安全问题导致安全和监控摄像头的使用大幅增加,通常使用高分辨率CCD或CMOS成像器,这些成像器与基于云的视频分析相结合,用于生物识别和面部识别分析。
然而,为了使生物识别算法正常工作,摄像机定位系统必须具有平稳的操作,以避免在摄像机运动时出现不必要的图像失真。许多需要谨慎或远程访问的应用也要求系统紧凑和节能。
线性伺服电机定位系统可以提供所需的平稳运行,但它们的代价是更高的功率和需求高分辨率编码器和精密电路。另外,步进电机具有多种吸引人的视频监控定位功能,包括静止时的全扭矩,出色的启动,停止和反向响应时间,无误差累积的运动重复性,以及固定步长的简单开环控制。
然而,固定步长是一个限制 - 即使200步/旋转电机的步长为1.8°,对于高分辨率视频来说也不够平滑。这可以通过微步进来克服,新的微步进驱动器IC使设计人员能够快速实现紧凑的高分辨率,低功耗定位系统。
步进电机基础
步进电机是无刷直流电机,将完整旋转分成相同数量的步骤。定子包含固定数量的缠绕电磁铁。转子结构有三种类型 - 永磁(PM),可变磁阻(VR)和混合动力。永磁电动机具有围绕转子圆周嵌入的交替的南北永磁体。 VR转子由软磁材料制成并切入齿(从末端看,转子看起来很像齿轮)。 VR电机的工作原理是在最小间隙时发生最小磁阻,因此转子齿被定向磁极吸引。
混合式步进电机有一个齿形转子,如VR电机,以及一个轴向轴周围的磁化同心磁铁。这种布置提供了类似于VR电动机的步长(可能的齿数大于PM转子中可能的磁体数量),具有改进的扭矩特性。
定子中的相绕组数通常为两个,但也可提供三相和五相电机。电机可以两种方式缠绕 - 单极或双极。图1和图2显示了两相电机中的两个选项。
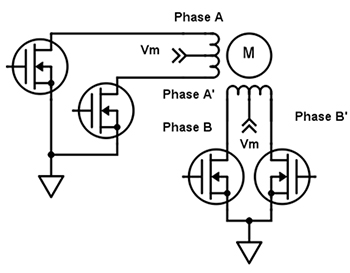
图1:在两相单极绕组中,中心抽头连接到电机电压,相脚切换到接地以改变电流方向。 (使用Digi-Key Scheme-It绘制的图表)
单极绕组每相具有一个绕组,带有中心抽头。中心抽头通常连接到电动机电压源,每个绕组的两端交替接地,以反转该绕组提供的磁场方向。这使电机控制简单,但电机效率较低,因为一次只使用一半绕组。
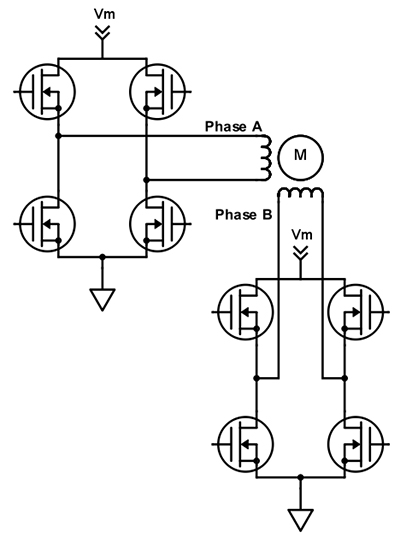
图2 :在双相双极绕组中,使用H桥驱动器反转相电流,允许总绕组立即通电。 (使用Digi-Key Scheme-It绘制的图表)
双极布置使用所有相绕组,但切换驱动电流更复杂。通常,这是通过H桥驱动器完成的,它也可以控制绕组中的电流(电机转矩与电流成正比。)
监控摄像机中使用的步进电机通常是两相混合型或PM双极型。在两相电动机中,定子中的电磁铁对略微偏移,使得当一个绕组断电并且下一个绕组接通时,齿将被吸引到下一个位置。这允许步数为转子齿数的四倍。因此,50齿转子每转200步,或每步1.8°。
步进排序
双极步进电机有两个绕组。通过顺序改变绕组中的电流来移动转子。可视化的一种便捷方法是使用相图。
图3显示了使用图2中的双极绕组的全步操作。
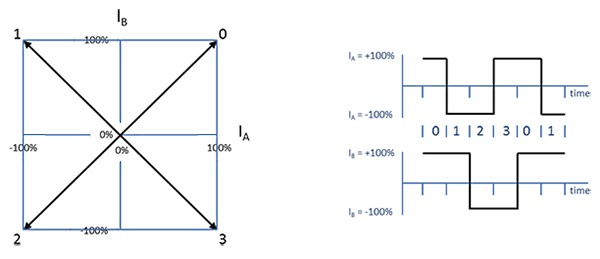
图3:在全步操作中,每个绕组中的相电流为-Imax或+ Imax。每次状态变化都会使电机向前移动一步。 (来源:Digi-Key)
在全步操作中,每个绕组中的电流为-Imax或+ Imax。图3时序图中所示的相电流变化将导致图3的相图位置序列。相图周围的每个90˚状态变化都会使电机向前移动一步。相图箭头(相量)的长度显示在EQ1中:
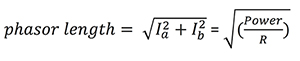
转矩与电流(直到磁饱和)和相量长度成正比给出了功率消耗的指示。当然这是理想情况,忽略了绕组特性的瞬时影响。
图4显示了半步进操作。这里允许每个绕组中的电流为-Imax,0或+ Imax。这允许在整个步骤之间进行“半步”,因此每转的步数加倍,从而允许更精细的定位。但是,要付出代价。请注意,当一个绕组值为0时,轴上的相量长度较短(约70%)。通过增加另一个绕组中的电流可以稍微减轻该转矩脉动。

图4:在半步操作中,每个绕组中的电流为-Imax,0或+ Imax。这使步数加倍,但存在电流和转矩波动。 (来源:Digi-Key)
如果你进一步采用半步进的概念,并允许绕组中的电流以模拟具有恒定相量长度的正弦交流波形的方式变化,如图5所示,您可以通过低扭矩纹波实现更精细的分辨率。这通常被称为正弦 - 余弦微步进。在图5中,整个步骤中的微步数是4。这被称为四分频微步进。
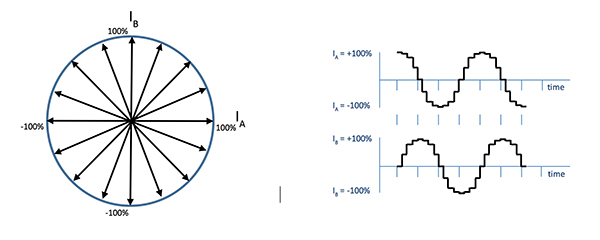
图5:在四分频正弦 - 余弦微步进中,通过改变模拟正弦交流波形中的相电流来减小转矩脉动。 (来源:Digi-Key)
虽然有些驱动器可以支持高达256分频的微步进,但实际上,最小步长和步进可重复性是负载动态的函数,电机绕组特性,以及驱动器电压和电流能力。
救援的集成驱动器
监控摄像机定位系统通常需要从几度到超过200度/秒的平移速率以及每秒5˚到10˚的倾斜速率。机械扭矩范围通常约为10盎司 - 英寸,电机输入电压通常在12 V至40 V范围内。
微步进提供平滑的步进能力,快速平移,倾斜和变焦速率,以及精确定位监控摄像系统所需要的。然而,满足这些要求的驱动电子设备是复杂的。幸运的是,市场上有很好的集成驱动器产品可以大大简化工作。
Allegro Microsystems的A5984是一款带有转换器的微步驱动器,非常适合单轴摄像机定位应用。它可以提供全,半和微步进模式,最高可达32分。它的工作电压范围为8到40 VDC,每相可以输出和吸收高达2 A.它采用24引脚QFN或TSSOP封装,可轻松适应小型定位系统。这些封装都具有裸露焊盘,有助于热管理。
图6显示了A5984的功能框图。 DIR引脚决定电机方向,STEP引脚使电机以完整或分步的方式前进,具体取决于MSx引脚。 MSx引脚选择全步,半步或4,8,16或32分频模式。翻译器负责实现这些模式所需的相序。控制软件只需为每次移动增量设置方向和脉冲STEP引脚。这允许使用简单,低成本,低功耗的MCU。
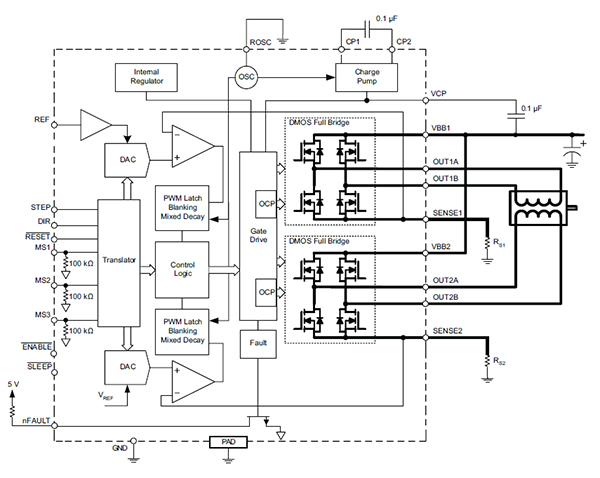
图6:在带有转换器的Allegro Microsystems的A5984微步进驱动器中,内部双H桥驱动器由转换器,内部控制逻辑和恒定关断时间脉冲宽度调制(PWM)驱动器控制,易于使用。 (来源:Allegro Microsystems)
每相的电流通过固定的关断时间脉冲宽度调制(PWM)控制进行调节。一个特殊功能是自适应百分比快速衰减(APFD)电流控制模式。 APFD逐步自动调节电流控制斩波电路中的衰减量。这消除了电流连续性通过零的问题,这可能导致在低速时错过步骤(图7和8)。此功能在相机定位系统中很重要,因为错过的脉冲显示为运动抖动。 APFD还可以降低系统中的整体电流纹波,从而增强平稳运行。
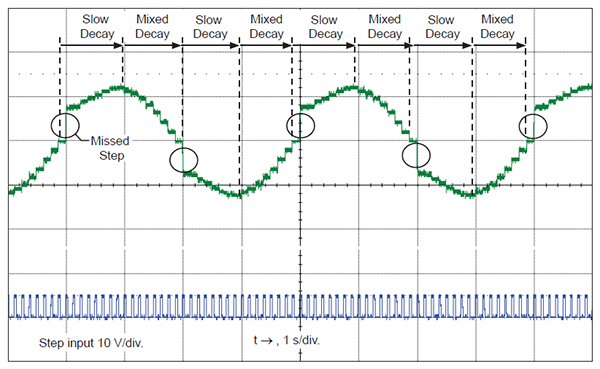
图7:固定斩波器衰减时间可导致零交叉处错过脉冲以踩踏速度慢。 (来源:Allegro Microsystems)
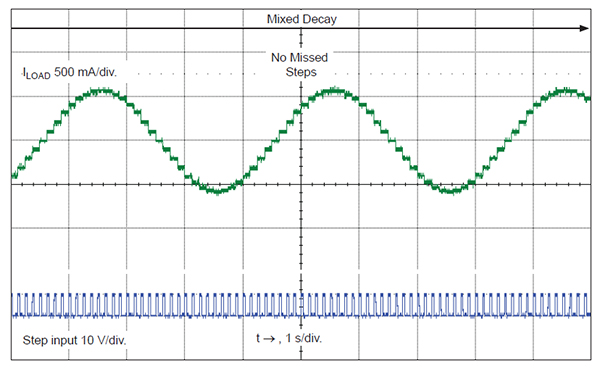
图8:自适应百分比快速衰减(APFD)为每个脉冲添加适当数量的快速衰减,以消除电流不连续性和慢速错过脉冲。 (来源:Allegro Microsystems)
通过禁用输出,电机输出可自动保护,免受短路负载和电池短路或接地短路。这些故障通过nFAULT引脚报告。还提供欠压锁定和热关断以提供额外保护。
此驱动器系列中的其他器件可用,包括用于双轴应用的双驱动器。
超平滑双驱动器
定位系统运动控制的另一种方法可以在安森美半导体的LV8714TA中找到。这是一款双步进电机驱动器,因此可以处理平移和倾斜任务。它可以驱动8至16 V的电机,每相最高1.5 A.它采用节省空间的7 x 7 mm TQFP裸露焊盘封装(图9)。
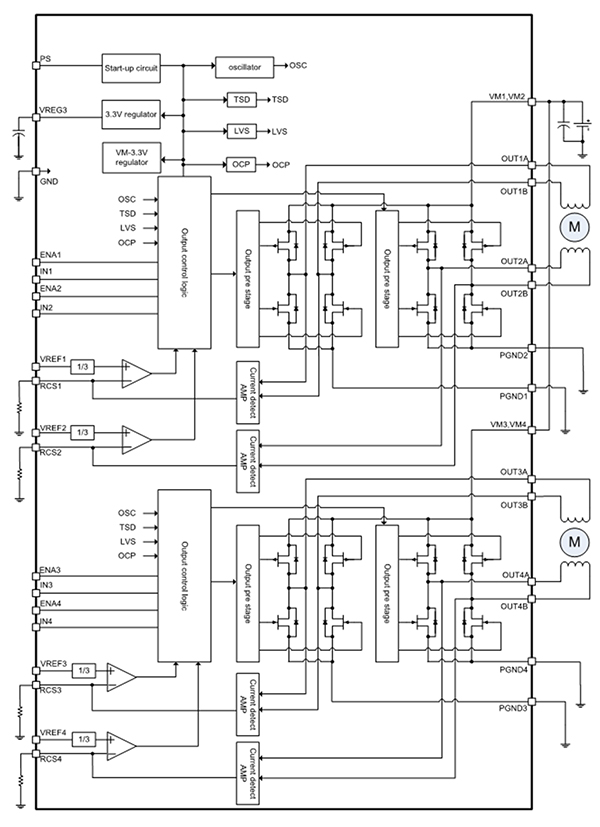
图9:安森美半导体的LV8714TA集成了双步进电机驱动器,因此一部分可以驱动平移和倾斜电机。 (来源:安森美半导体)
每个电机由两个使能引脚和两个输入引脚控制。输入引脚上的相位输入序列决定了步进的方向,如表1所示。
INx ENA1,ENA2相位方向0-90 90-180 180-270 270-360 IN1 HLLHH正转IN2 HHLLH IN1 HHLLH反转IN2 HLLHH
表1:LV8714TA步进方向由电机INx引脚上的相位输入序列控制。 (来源:安森美半导体)
与大多数步进电机驱动器不同,LV8714TA不采用外部电流检测电阻。相反,它使用专有的内部电流检测机制来结合VREFx引脚(每个电机相位一个)监视和控制线圈电流。相位中所需的最大线圈电流由连接到RCSx引脚的电阻设置。该相VREFx引脚的恒定值将产生该相的恒定电流,并且每个相变将采用一个完整的步骤,如表1所示。
但是,如果90°偏移,则完全整流电压正弦波 - 与相位输入同步 - 应用于电机相对的VREFx引脚,线圈电流将通过步进顺序变化,从而产生微步进。通过这种方式,可以实现大于256分频的微步进,从而实现超平滑操作(图10)。
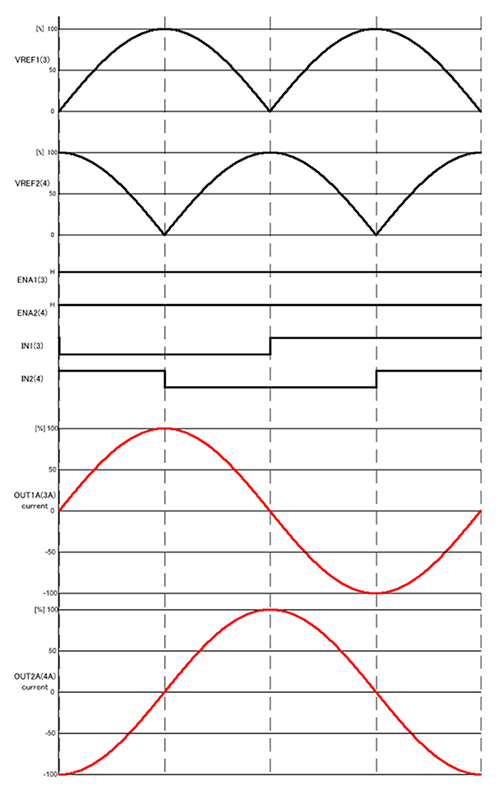
图10:在安森美半导体的LV8714TA步进驱动器上,VXF引脚上的INx引脚和全波整流正弦电压波形相结合,可产生精细的微步线圈电流。 (来源:安森美半导体)
这种性能的折衷更多是软件复杂性,因为主机微控制器需要在整个步骤序列中控制INx引脚和VREFx引脚。 VREFx波形可通过适当的数字电位器或数模转换器(DAC)进行控制。
该器件具有欠压,过流和过温保护功能,并具有非常好的功能。低待机电流1μA(典型值)。
结论
监控摄像机定位系统需要平稳准确的操作,以满足高分辨率摄像机和先进监控软件的需求。双极步进电机与合适的微步进控制器相结合,可以提供这种性能水平,同时满足成本,能源效率和包装需求。
-
半导体
+关注
关注
334文章
27380浏览量
218947 -
电机
+关注
关注
142文章
9022浏览量
145536 -
摄像机
+关注
关注
3文章
1603浏览量
60062
发布评论请先 登录
相关推荐
AI智能识别监测摄像机

探索伺服转台型云台驱动方案在云台摄像机中的神奇应用
戴头盔识别摄像机


未系安全带智能监测摄像机

基于STM32单片机的GPS定位系统设计

UWB人员定位系统的定位原理
佩戴安全头盔监测识别摄像机

基坑监测识别摄像机

伺服电机绝对定位和相对定位问题

伺服电机的精确定位方法及分类简介 | 步进电机驱动器细分评定

伺服电机的精确定位方法
机器视觉系统中常用摄像机的分类






 工商网监
工商网监
评论