 开关稳压器控制回路响应的原理与基本特性
开关稳压器控制回路响应的原理与基本特性
开关DC-DC电压调节器(“开关调节器”)依赖于闭合反馈控制回路,以确保在变化的负载条件下保持所需的电压和电流输出。该控制回路的性能影响电源的关键性能参数,包括线路和负载调节,稳定性和动态响应。
工程师可以通过测量控制回路的频率响应来量化控制回路的性能。电压调节器可在很宽的频率范围内工作。然后可以通过将补偿器网络结合到电路中来“调谐”频率响应。如果工作做得好,最终结果是一个开关稳压器,它在很宽的频率范围内稳定但没有过度补偿,因此其动态响应很差。
本文介绍了开关稳压器控制环路的基本原理,然后介绍了精心设计的模块化开关控制器和稳压器的一些示例,这些控制器和稳压器可用作高性能电源的基础。
电压调节器控制回路
反馈控制回路是简单的概念。控制循环的目的是约束系统变量(例如,输出),使其保持在期望值。系统变量不断受到监控,并与参考值进行比较,参考值等于所需的输出。然后使用误差信号(期望值和实际输出之间的差值)来调整系统变量以使其恢复正常。
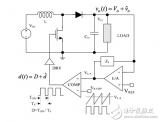
在开关调节器中,系统变量是电压(和/或电流)与电路设计者设定的参考值进行比较。然后将误差放大器的输出(误差信号)馈入比较器,该比较器调节开关晶体管的占空比。占空比与输出电压成正比。图1显示了升压(“升压”)开关稳压器的反馈环路的简化原理图。
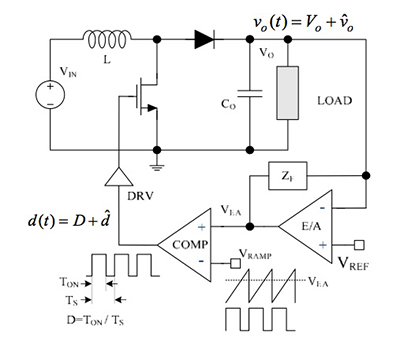
图1:控制的简化原理图用于升压调节器的回路。 (由Fairchild Semiconductor提供)
在完美的控制环路中,无论负载或输入电压如何发生,输出电压都将保持锁定在参考电压。在实际电路中,负载和输入电压的变化会在一定程度上扰乱输出。工程师希望设计他或她的电路,以便控制回路尽可能快地响应变化并精确调节输出电压,同时保持稳定。
控制回路可以通过其频率响应来表征。频率响应表示开关稳压器如何在一定频率范围内的规定工作条件下作出反应(由电压调节器的“传递函数”确定)。频率响应是电压调节器的动态模型,显示输入电压,负载和占空比的变化如何根据频率影响输出电压。频率响应会影响电压调节器的反应时间,精度和稳定性。
增益和相位差
电路的频率响应可以通过数学建模或测试来确定。实际设计(或两者的组合)。这两种方法都不是微不足道的,但电压调节器制造商提供有用的应用说明和在线软件来协助这两种技术。 (例如,德州仪器(TI)应用报告 1 是实用测量技术的有用指南。)
奈奎斯特稳定性定理可用于表征频率响应控制回路,但它是一个复杂的分析,需要高水平的专业知识来提取设计洞察力。幸运的是,开关电压调节器不可避免地在输出级包括一个低通滤波器,这简化了频率响应,因此Bode图可以用来描述传递函数来代替奈奎斯特数据。与奈奎斯特分析产生的极坐标图相比,波德图更容易分析。
波特图是传递函数的幅度和相位随频率变化的曲线图,其中幅度分别以分贝和相位绘制,而频率以对数刻度显示。图2显示了图1所示升压调节器的增益和相位波特图。
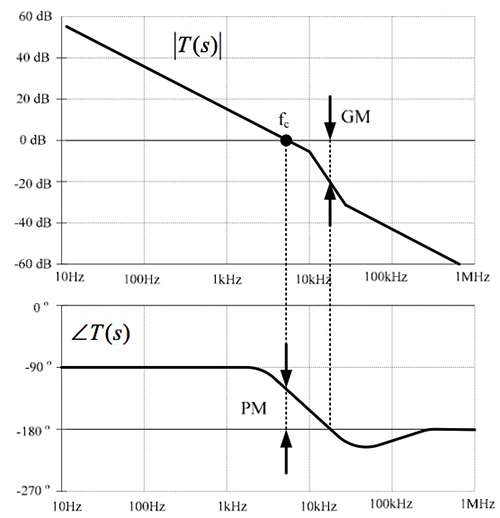
图2:升压稳压器的增益和相位波特图。 (Fairchild Semiconductor提供)
这些图揭示了控制回路性能的一些关键信息。第一个兴趣点是交叉频率(fc)。这是控制环路增益为单位(0 dB)的频率,也称为环路带宽(本例中约为7 kHz)。第二个兴趣点是相位滞后达到180 o 的位置(本例中约为25 kHz)。相位裕度(PM)等于180 o 减去fc处的相位滞后(对于该示例,约为60 o )。增益裕度(GM)是相位滞后180 o 的增益(在这种情况下为20 dB)。
假设增益曲线只有一次(0 dB) (对于在输出级具有低通滤波器的电压调节器实际上总是如此),如果fc处的相位滞后小于180度,则系统将是稳定的。在其他频率,相位滞后可超过180 o 并且控制回路仍将保持稳定。对于大多数控制回路,经验丰富的工程师的目标是实现大于45 o (且小于315°)的相位裕度。通常,相位裕度为45 o 提供良好的瞬态响应和良好的阻尼。对于升压或降压开关稳压器,增益裕度应高于10 dB。
即使控制环路相位滞后超过180°,许多系统也可以稳定增益大于0 dB o 频率小于fc。然而,当环路增益减小时,这样的系统可能变得不稳定。这些系统只是“有条件”稳定,并没有表现出良好的设计实践。
(注意,在低负载时,大多数开关稳压器将进入不连续的电流导通模式。在这种模式下,电路的频率响应会发生变化。另请注意,没有输入电压前馈的电压模式转换器会随着输入电压的变化而出现频率响应的变化。[请参阅TechZone文章“开关稳压器连续和不连续模式之间的差异及其重要性”和“电压和电流” - 直流 - 直流开关调节器中PWM信号生成的模式控制“。]
初始电路布局证明不合适并改变电路的频率响应的可能性甚至超过均匀工程师需要引入补偿网络。这些网络的任务是塑造控制环路增益,使fc移动到合适的位置,相位和增益裕度导致良好的动态响应,线路和负载调节以及稳定性。有几种类型的补偿网络,这些将在另一篇TechZone文章中讨论。
精心设计的开关电压调节器在电学和声学上都很安静。对于欠补偿系统而言,情况并非如此,这些系统会产生来自磁性元件或陶瓷电容器的可听噪声,开关波形中的抖动,输出电压的振荡以及许多其他不期望的特性。
另一方面,过度补偿的系统可以非常稳定和安静,但代价是动态响应缓慢。这种系统的fc将以低频率发生,通常低于10kHz。慢动态响应设计需要过大的输出电容,以满足瞬态调节要求,从而增加了电源的总体成本和尺寸。当然,诀窍是取得平衡。最佳补偿设计稳定安静,但响应速度快,输出电容最小。
使用电源模块
虽然从头开始设计开关稳压器有一些优势(参见TechZone文章“DC/DC稳压器:如何在离散和模块化设计之间进行选择”),许多工程师将其电源设计基于半导体供应商的电源模块,如Fairchild Semiconductor,Linear Technology,TI和Maxim Integrated。
电源模块将电压调节器设计的许多电路元件集成到一个芯片中。例如,控制器集成了误差测量和脉冲宽度调制器(PWM)系统(设置占空比),同时调节器将开关驱动器和开关元件本身添加到控制器电路。通常,工程师只需选择电感器和滤波器元件来补充稳压器芯片,电源即可运行。
电源模块将主要(但不是完全)确定基于模块的设计的初始频率响应,因此工程师查阅给定芯片的数据表以检查其是否可能符合其建议设计的规范非常重要。
图3(a)和(b)显示了用于降压稳压器的凌力尔特LTC3829控制器的控制环增益和相位的波特图。 (这些图是使用公司的LTpowerCAD设计工具生成的。)控制器可以驱动所有N通道同步功率金属氧化物半导体场效应晶体管(MOSFET)级。该器件采用4.5至38 V输入工作,输出电压为0.6至5 V.该器件的效率高达94%,可在250至770 kHz范围内以可选择的固定频率工作。
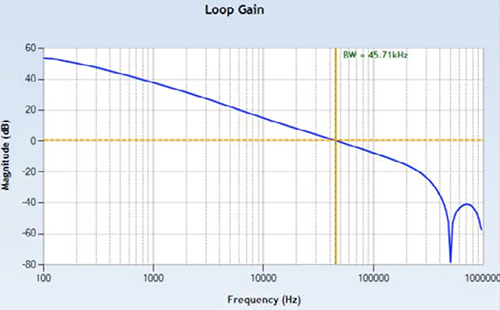
图3(a):Linear Technology LTC3829控制器的控制环路增益。
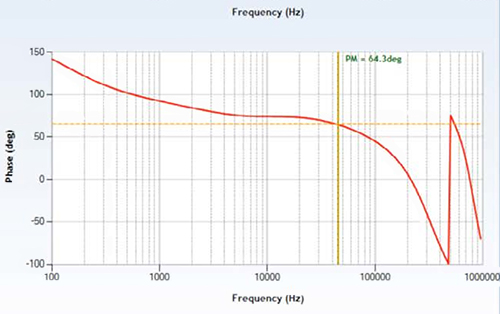
图3(b):Linear Technology LTC3829控制器的控制回路相位。
从图中可以看出,LTC3829的fc为45 kHz,相位裕度为64 o 。增益裕度接近20 dB。这些数据使控制器成为稳定而灵敏的电压调节器的良好基础。
TI提供各种开关电源控制器和稳压器电源模块。图4显示了基于TPS23754控制器的公司参考设计的频率响应。 TPS23754针对以太网供电(PoE)供电设备(PD)应用中的隔离调节器角色进行了优化(请参阅TechZone文章“新一代PoE控制器轻松处理更高功率”)。同样,这是一个设计良好的开关稳压器的例子,其相位裕度为92 o 和25 dB的增益裕度。
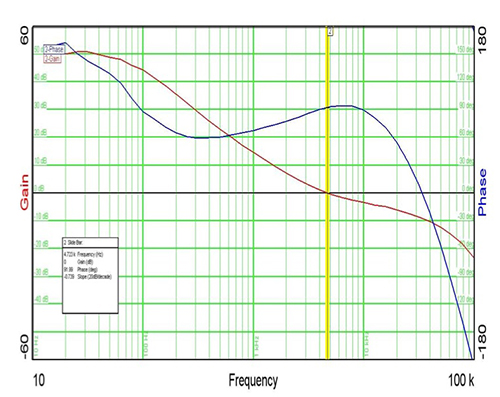
图4:PoE应用的基于TI TPS23754的电源参考设计的控制环路增益和相位。
就其本身而言,Maxim Integrated在其数据表中为其许多开关稳压控制器提供了有用的频率响应波特图。该公司还提供的器件不仅集成了电感器,还集成了补偿网络,以确保开关稳压器稳定响应。
例如,MAX17505是一款高压同步降压稳压器,具有双集成MOSFET,工作电压范围为4.5至60 V。它在0.9 V至90%VIN输出电压范围内提供高达1.7 A的电流。图5显示了MAX17505的频率响应,表明fc为60.7 kHz,相位裕度为59 o 。
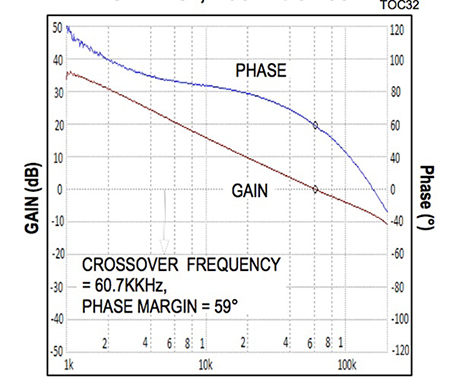
图5:Maxim MAX17505开关稳压器的控制环路增益和相位。
需要基准测试
原则上开关稳压器的控制环路很容易理解,在实践中表现更难掌握。即使是最专业的工程师也可能需要数天才能补偿在纸上看起来不错的电源设计,但证明其不稳定或动态响应不佳。
选择一个集成了大部分电源组件并由制造商进行内部补偿的控制器或稳压器模块可以缓解这一挑战。但是,添加外部滤波器组件可能会改变模块的频率响应,因此可能需要进行额外的设计工作。主要组件制造商提供设计软件来模拟所提议设计(包括外部滤波器组件)的频率响应。这缩短了设计过程,但通常仍需要一些原型台架测试来改进精心设计的产品的补偿网络。
-
开关稳压器
+关注
关注
4文章
793浏览量
73479 -
比较器
+关注
关注
14文章
1651浏览量
107243 -
调节器
+关注
关注
5文章
851浏览量
46434
发布评论请先 登录
相关推荐
DC-DC 开关稳压器中用于 PWM 信号发生的电压和电流模式控制
开关稳压器的基础:重要特性之电源特性
不同开关稳压器拓扑的噪声特性
不同开关稳压器拓扑的噪声特性
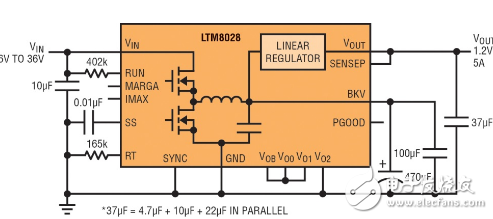
LTM8028线性稳压器高效率同步开关转换器的响应特性






 工商网监
工商网监
评论