 如何满足无人机大功率电机的要求
如何满足无人机大功率电机的要求
无人驾驶飞行器(UAV)已成为军事基础设施的重要组成部分,并且从武器携带平台到用于监视和情报收集的小型和难以追踪的单位的种类越来越多。无人机平台具有很强的适应性,允许使用不同的传感器类型,如图像传感器和相机,以及光谱仪和化学传感器,用于使用高光谱成像和传感器融合的复杂分析。
图1:无人机具有广泛的应用[来源:北约]。
各种各样的要求导致在分析电力需求和电力供应方式时需要做出大量选择。图像处理和传感器融合解决方案往往意味着需要大量的处理能力,这增加了无人机的总体功率要求。尽管如此,一些功能可以被卸载到地面站,用于捕获的数据不太可能被空中干扰或截获的系统,并且可以容忍往返处理延迟的等待时间。图像处理可以被分割,使得主要用于导航的更简单的技术可以保存在机载系统上,但是主要由地面部队或情报服务使用的更复杂的分析通过无线电通信被卸载。用于本地处理,高 - 性能移动中央处理单元(CPU)和并行处理图形处理单元(GPU)最初设计用于结合到移动电话中,可以以低成本和低功率提供有效的计算机平台。这些类型的处理器可以提供千兆级的计算能力,但功耗不到10瓦。然而,这些器件具有可能使设计复杂化的功率需求,因为它们的核心逻辑通常在1V或更低的低电压下工作,但是I/O和存储器访问需要支持其他电压轨。根据可能在任何时间使用执行单元的方式,它们也往往具有高度可变的能量需求。
重量是无人机的关键因素。任何可以减轻发电和支持电子设备重量的事情都可以用于更大的有效载荷,更长的飞行时间,允许从较短的跑道起飞,或允许使用替代电源。太阳能是长距离,高空无人机的潜在能源。燃料电池可在未来的设计中提供高能量密度选择,锂离子或锂聚合物电池可作为备用电源或作为小型无人机的主要电源。
当前无人机中的主要动力源可能是基于涡轮机的燃料动力发电机,其选择的能量密度相对较高。发电机产生的交流电通常转换为中压或高压直流电,以便分配给不同的无人机电子和电子子系统。
初级电压可以采用级联方式转换为适当的电压电平,点对点负载(POL)转换器提供所需电压水平,靠近需要它们的设备。尽管在绝缘和操作安全性方面使用低压导轨更容易管理,但如果用于在较长距离上传输电力的导轨设计为在较高电压下运行,则损耗将会降低。这将最大限度地减少I²R损耗,尽管这里的任何改进都需要与任何POL转换器的损耗进行平衡。由于无人机需要携带的设备种类繁多,因此需要支持各种各样的电压;从先进的图像处理和制导处理器的1 V或更低,到执行器的24 V,例如用于部署着陆轮的那些,可能用于飞行转子的更高水平。
由于电压范围广,中频根据无人机的大小和可能用于维持飞行的大功率电机的要求,24 V或48 VDC的直流值最有意义。主配电总线可以降级为中间总线,以将12 VDC范围内的较低电压提供给POL转换器,POL转换器可以使用非隔离设计来降低成本和尺寸。
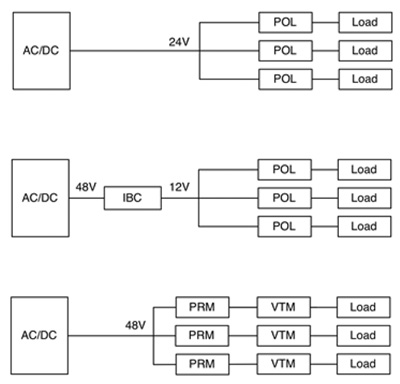
图2:发电机驱动无人机的不同配电架构的比较。
中间总线转换器的一个例子是来自CUI的Novum NQB-420DWA,这是一种基于数字控制器的设计,可提供多达39 A,输入电压为36 V-75 V,电压为12 V.该设计采用紧凑的行业标准四分之一砖形式。这种砖式转换器中的数字控制策略的优点是即使在相对低的负载下也是高效的。即使在半负载下,NQB-D仍然保持96%以上的效率,而老式架构只能在满负载或接近满负载的情况下保持高效率。
对于下游使用,可选择用于移动处理器的POL转换器和高级可编程逻辑是德州仪器公司的TPS84621。为了节省空间,DC/DC转换器将功率MOSFET,电感器和其他无源器件拉入薄型封装,在其大部分输出范围内提供高达6 A的效率,效率高于90%。该转换器采用12 V电源供电,效率超过90%,从1.5 A到略高于5 A.转换器将支持0.6 V至5.5 V的电压轨,精度为1%。
级联配电系统的额外复杂性,效率提高5%或10%可能看起来不明智,但失去的能量将作为热量消散,这需要包含更大的散热器,甚至可能更复杂的冷却布置,因为对流变得在高海拔地区效率较低。这些因素增加了总重量并缩短了飞行时间或降低了有效载荷能力。但是,效率计算需要根据具体情况进行。 POL转换器设计的改进导致了降压转换器拓扑结构的出现,这种拓扑结构可以消除对中间总线的需求。例如,飞兆半导体的FAN8303可为接近1 V的较小处理器提供2 A的输出电流,或者在5 V至23 V的工作输入范围内需要高达20 V的电压供应的传感器。为了节省空间, FAN8303采用单片设计,集成了基于非同步架构的内部功率MOSFET。该器件采用电流模式工作,提供快速瞬态响应,允许使用能够快速在功耗模式之间移动的处理器。安全功能包括逐周期电流限制和热关断保护,以防损坏导致连接短路。
传统中间总线架构的替代方案是采用分解拓扑,其中调节和电压转换被分离并由单独的模块执行。虽然这一开始看起来过于复杂,但该技术可以优化内部电子设备并简化整个配电系统。通过使用分解功率架构,可以支持高电流,低电压负载,而无需采用中间总线架构。分解功率的另一个好处是它非常适合提供脉冲功率,例如雷达系统所需的功率。
在雷达系统中,发射器和接收器电子器件可以在很短的时间内要求高电流。这种低占空比可以通过一组比传统电源拓扑更小的分解功率器件来适应。这样可以保持更高的整体效率,因为POL转换器的工作时间更接近其峰值效率点,并且不需要大型去耦电容阵列来提供这种峰值需求所暗示的快速瞬态响应。
Vicor的分解功率架构使用器件称为基于正弦幅度转换器(SAC)的电压转换模块(VTM),几乎可以即时提供POL电流。保持电压在容差范围内所需的控制由上游降压 - 升压零电压开关(ZVS)调节器执行,因此其控制环路不会影响瞬时电流的输送。
通过使用a来确保下游调节调节器和VTM之间的固定电压比。但是,由于VTM执行真正的分压和电流倍增,因子分解总线电压可设置为远高于中间总线系统中常见的总线电压的值,从而减少分配损耗并允许使用更窄的分配总线跟踪
SAC拓扑本身在内部使用高频谐振回路,有助于保持工作1 ms或更短时间的脉冲负载容量。通过在稳压点和最终负载之间使用高频SAC,可以降低整个电路的串联阻抗,从而使储能大容量电容的比例缩小约为VIN/VOUT比的两倍。 》Vicor分解功率架构中的模块配对提供了传统遥感和反馈环路的单线替代方案,可以精确控制隔离的POL电压,无需直接连接负载或噪声敏感,反馈路径中的带宽限制隔离器件。使用电池供电时,使用较低电压的中间总线可以获得更高的整体效率,运行电压为12 V左右,因为升压转换器需要转换低压大多数电池组输出到更高的电压。随着燃料电池和太阳能等技术的出现,无人机设计人员的选择将会增加。例如,使用燃料电池的实验表明,功率转换拓扑的选择对整体效率至关重要。来自堪萨斯州立大学的研究人员发现,乙醇燃料电池呈现可变的非线性阻抗,这些阻抗不能单独作为占空比的函数显示可预测的输出,这使得很难使用基于脉冲宽度调制(PWM)的传统转换拓扑结构。
太阳能系统将依赖于使用最大功率点跟踪(MPPT)跟踪电路来确保在转换为适合于补充二次电池或中间总线电压的电压之前以最佳电压收获太阳能。
随着无人机的发展,将出现更多高效率的电力转换架构,以考虑到各种各样的燃料来源和飞行器的应用。
-
传感器
+关注
关注
2557文章
51751浏览量
758914 -
转换器
+关注
关注
27文章
8784浏览量
148894 -
无人机
+关注
关注
230文章
10592浏览量
183653
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论