 跨阻放大器的结构特性与应用分析
跨阻放大器的结构特性与应用分析
用于测距和检测的光越来越多地用于关键应用,例如先进的驾驶员辅助系统(ADAS),光探测和测距(LiDAR)以及未来的自动驾驶汽车,以及移动式脉搏血氧仪。然而,检测信号的可靠性在很大程度上取决于检测电路的准确性和稳定性。
该电路的关键要素是跨阻放大器(TIA),它改变了低电平光电二极管电流信号为可用电压输出。虽然TIA不是新的,但设计人员在稳定实现方面存在很多困难,其中一个原因是隐藏寄生效应。
这个特性将描述TIA的结构以及寄生效应和其他特性。然后,它推导出简单的方程,以帮助设计稳定的TIA,并引入适合实际实现的合适放大器。
跨阻抗放大器信号增益
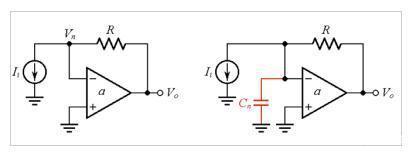
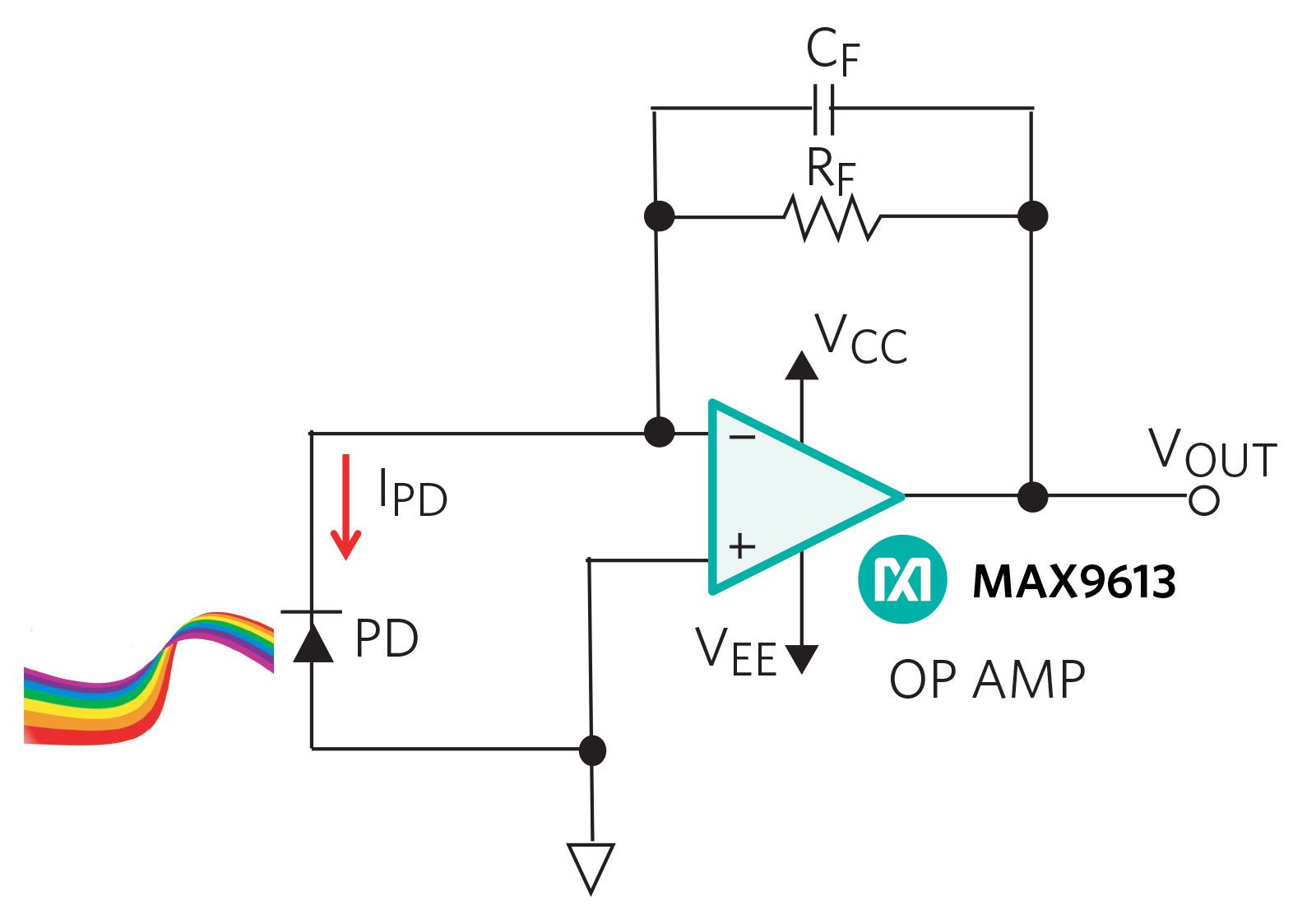
跨阻抗放大器电路由光电二极管组成,放大器和反馈电容/电阻对(图1)。该电路看起来很简单,但隐藏的寄生效应会在不知不觉中导致不必要的电路不稳定。
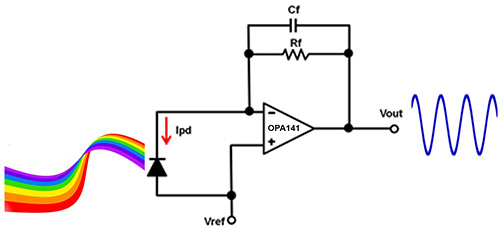
图1:零反向偏置,互阻抗运算放大器电路。它看起来很简单,但寄生效应会导致不稳定。 (图像来源:Digi-Key Electronics)
撞击光电二极管的光会产生从二极管阴极流向阳极的电流(Ipd)(图1)。该电流也流过反馈电阻Rf。 Ipd乘以Rf的值会在运算放大器的输出Vout处产生输出电压。在这个电路中,增加光亮度会使输出电压变得更大。
图1中标题中的“零反向偏压”表示光电二极管两端的电压为0伏。如果光电二极管两端的反向偏压为0伏,则漏电流或暗电流较低,与反向偏压较大的配置相比,光电二极管结电容较高。
交流信号TIA电路的增益主要取决于放大器反馈环路中的电阻和电容。公式1表示图1的理想交流和直流信号传递函数。
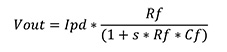
该公式表明单极点频率响应取决于反馈元件但是,这并没有解释为什么TIA有时会发生振荡。
噪声增益是该系统中的第二个增益方程。与每个放大器电路一样,放大器开环增益与噪声增益相交的波特图定义了电路的稳定性。如果这种交叉以20 dB/十倍的闭合速率发生,则电路相位裕度大于或等于45度。如果这两条曲线的闭合速率大于20 dB/decade,则电路相位裕度小于45度。
虽然稳定性理论表明0度的相位裕度会导致边际稳定性,但实际上推荐的系统最小值为45度。具有45度相位裕度的电路将产生23%的过冲阶跃响应行为。
TIA噪声增益响应
要查找放大器的开环增益曲线,请参阅设备的数据表。要确定任何放大器电路的噪声增益,请在放大器的非反相输入端找到电路增益。出于本文的目的,重要的是要考虑电路中所有电容和电阻的影响。考虑到这一点,有关电路的全部细节,包括光电二极管结特性和放大器寄生输入电容,如图2所示。
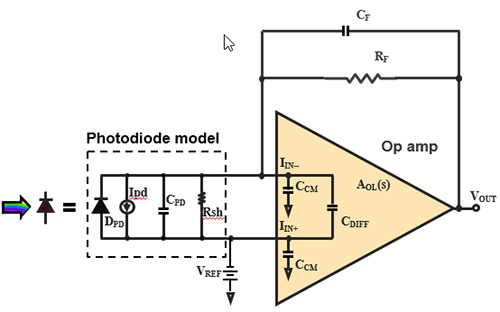
图2:零反向偏置TIA电路,以简化模式观察光电二极管和放大器。该版本考虑了光电二极管结特性以及放大器寄生输入电容。 (图像来源:Digi-Key Electronics)
光电二极管模型具有DPD,Ipd,CPD和Rsh元素。 DPD代表理想二极管,IPD代表光产生的电流。光电二极管和应用环境定义了IPD的最大值。光电二极管结电容CPD是由光电二极管中的p和n材料界面产生的耗尽区的结果。分流电阻Rsh等于零偏置光电二极管的有效电阻。这种寄生电阻是p-n硅结的结果,通常在DC时等于几个千兆欧姆。
在放大器的非反相和反相输入端有三个寄生电容。 CCM是AC地的非反相和反相输入寄生电容。对于CMOS和FET器件,这是交流接地电容的栅极和ESD单元。 CDIFF是非反相和反相输入晶体管栅极之间的寄生电容。
对于以下噪声计算,放大器输入端的电容彼此并联。 Cin中包含的元件是光电二极管的结电容,运算放大器共模反相输入电容(CCM)和运算放大器差分输入电容(CDIFF)。所有这些电容并行出现,因此加在一起以定义Cin值。 Cin表示运算放大器输入端的电容组合为CPD + CDIFF + CCM。请注意,Cin计算中只有一个CCM术语。这是因为非反相输入CCM上的节点处于AC等效值。
等式2表示图2中的噪声增益传递函数(根据运算放大器的非反相输入计算)。 p》

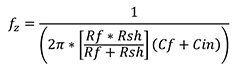
根据公式2,通过公式3和方程4很容易识别噪声增益传递函数中的零频率(fz)和极点频率(fp) :
跨阻放大器稳定性
等式3和4提供了绘制波德图上噪声增益曲线的工具。例如,波特图显示三个示例噪声增益曲线叠加在运算放大器的开环增益上(图3)。
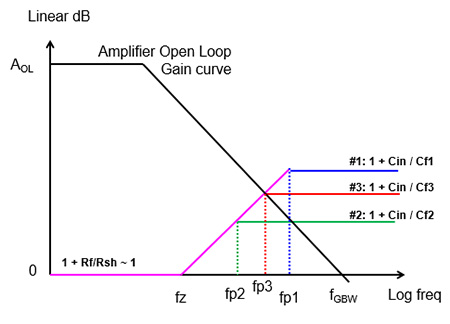
图图3:叠加在运算放大器开环增益曲线上的三条噪声增益曲线的波特图。 (图像来源:Digi-Key Electronics)
波特图有助于快速确定光电二极管系统在噪声增益曲线与运算放大器开环增益曲线相交的位置的稳定性。估算这两条曲线的变化率以粗略确定稳定性。
表1定义了三条噪声增益曲线的稳定性条件。对于1号噪声增益曲线,曲线截取放大器开环(AOL)曲线,变化率等于40 dB/decade。该交叉反映了小于45度的相位裕度。相位裕度小于45度的电路略微稳定,表现出大于23%的阶跃响应过冲。当fp1频率增加到截距频率以上时,振荡很可能。
交叉点处的Aol斜率噪声曲线斜率
交叉点的变化率变化的估计相位
系统《 BR》稳定? 1号噪声增益曲线-20dB/
decade + 20dB/
decadeΔ40dB/
decade 《《 45°不稳定,23%过冲2号噪声增益曲线-20dB/
十年+ 0dB/
十年Δ20dB/
十年》》 45°稳定,
《23%过冲3号噪声增益曲线-20dB/十年~0dB/《 br》十年!Δ20dB/
十年45°稳定,
〜23%过冲
表1:稳定性的波特图分析(图像来源:Digi-Key Electronics)
对于2号噪声增益曲线,曲线在噪声增益曲线平坦后很好地截取Aol曲线。在这种设计中,闭合速率等于20 dB/decade。但是,相位裕度大于45度,从而形成非常稳定的电路。此响应的过冲率远低于23%。随着fp2频率的降低,过冲值减小。
对于噪声增益曲线No.3,曲线在极点频率fp3处精确截取Aol曲线。在这种设计中,变化率等于20 dB/decade。但是,相位裕度现在等于45度。这样可以产生稳定的电路,具有23%的过冲。
在设计的这一点上,可以估算反馈电容(Cf)的值。对于单位增益稳定运算放大器,公式5提供了有用的Cf估计值,创建了45度电路相位裕量。
ADAS和LiDAR放大器解决方案
在ADAS和LiDAR应用中,传感器正在执行位置感应活动,要求它们快速。适用于ADAS和LiDAR系统的组件是Vishay Semiconductor TEFD4300硅PIN光电二极管和ADI公司的ADA4666-2放大器(图4)。 Vishay TEFD4300硅PIN光电二极管可感应可见光和近红外辐射。这种高速光电探测器适用于位置传感,高速数据传输光电检测,光学开关和编码器。 TEFD4300 0伏偏置结电容(CPD)为3.3 pF,分流电阻(Rsh)为67GΩ。在该系统中,最大预期输出电流光电二极管电流为10μA(IpdMax)。
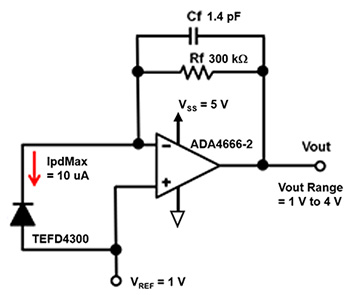
图4:使用ADI公司ADA4666-2放大器和Vishay Semiconductor TEFD4300光电二极管的ADAS和LiDAR TIA系统。 (图像来源:Digi-Key Electronics)
对于ADA4666-2,输入共模电容(CCM)等于3 pF,输入差分电容(CDIFF)等于8.5 pF。增益带宽积(GBWP)等于4 MHz。在该系统中,电源为5 V,放大器的输出摆幅为1 V至4 V.为实现此输出摆幅,VREF等于1 V.为实现4 V的最大输出摆幅,反馈电阻(Rf) )等于(VoutMax-VoutMin)/IpdMax =(4V-1V)/10μA= 300k欧姆。
从上面的值,Cin = CCM + CDIFF + CPD = 14.8pF。应用公式5,Cf~1.4 pF。
脉搏血氧仪
脉冲血氧仪光电感应系统的适当组件是Luna Optoelectronics PDB-C152SM蓝色增强型硅PIN光电二极管和德克萨斯州仪器OPA363放大器(图5)。 Luna PDB-C152SM蓝色增强型硅PIN光电二极管是一款低成本,高速光电探测器,最大光谱响应为950 nm。 PDB-C152SM 0 V偏置结电容(CPD)为15 pF,分流电阻(Rsh)为500 Mohm。在该系统中,最大预期输出光电二极管电流为10μA(IpdMax)。
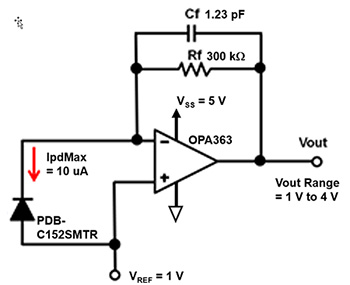
图5:使用德州仪器OPA363放大器的脉搏血氧仪TIA系统和Luna Optoelectronics PDB-C152SM光电二极管。 (图像来源:Digi-Key Electronics)
对于OPA363,输入共模电容(CCM)等于3 pF,输入差分电容(CDIFF)等于2 pF。增益带宽积(GBWP)等于7 MHz。在该系统中,电源为5 V,放大器的输出摆幅为1 V至4 V.为实现此输出摆幅,VREF等于1 V.为实现4 V的最大输出摆幅,反馈电阻(Rf)等于(VoutMax - VoutMin)/IpdMax =(4 V - 1 V)/10μA= 300 k ohms。
从值Cin = CCM + CDIFF + CPD = 20 pF。应用公式5,Cf~1.23 pF。
结论
本文简要讨论了三个简单公式的推导,以帮助设计人员为所有跨阻抗放大器创建稳定的电路。这些公式涉及互阻抗放大器的信号和噪声增益的推导。
适用于TIA的放大器具有低输入偏置电流,低输入失调电压和充足的频率带宽。本文介绍了使用两个合适器件的两个TIA的最终设计:ADI公司的ADA4666和德州仪器的OPA363放大器。
-
放大器
+关注
关注
143文章
13715浏览量
214612 -
adas
+关注
关注
309文章
2204浏览量
209008 -
自动驾驶
+关注
关注
786文章
13976浏览量
167498
发布评论请先 登录
相关推荐
跨阻放大器(TIA)的功能和应用范围
跨阻结构的优点是怎么的来的?
【每天看电路第23期】电流反馈放大器和跨阻放大器
求助,如何理解跨阻放大器的增益带宽积?
跨阻放大器的带宽扩展技术
跨阻放大器电路的增益和动态特性的指导性示例






 工商网监
工商网监
评论