 采用高级MCU和PMICC的低功耗设计
采用高级MCU和PMICC的低功耗设计
无线物联网和可穿戴电子产品依赖能够提供更长电池寿命的低功耗设计。然而,紧张的电量预算会造成无法满足人们对更多功能的需求,并因此可能迫使开发人员转而采用大电池和重复充电设计,而这对用户来说也可能造成新的困扰。为此,我们需要一个能够更周到地进行计算处理和电源管理的解决方案。
这些解决方案必须帮助设计人员满足日益苛刻的用户期望。例如,用户希望智能产品与传统版本一样可靠且值得信赖。大多数用户希望他们的智能锁不要因电量耗尽而锁不上门,同时还希望智能产品具有与其前代产品相似的外观。例如,用户在选择智能手表时,可能不会考虑比现有手腕可穿戴设备更大或更笨重的产品。
重要的是,用户希望智能设备会带来一定的价值回报,让购买、安装和使用物有所值。最终,用户希望智能产品能够提供一种隐形智能,既为用户提供一些有价值的服务,同时保持与所替代传统产品同样的交互方式和外观。
所有这些期望都对产品功能、外形尺寸和功耗造成一定压力。由于功能要求,通常情况下,MCU 和支持性电源管理功能不符合功耗预算的情况最严重。
但是,开发人员可以采用高级 MCU 和 PMIC,在满足更严苛的功耗和性能要求的同时,不会影响设计尺寸和可用性。
设计挑战
对于工程师而言,构建带隐形智能的智能设计突显了功率要求和功率可获得性之间的冲突。为了提供有竞争力的产品,工程师发现他们不仅要构建更多功能丰富的嵌入式系统,集成更多传感器,还要执行更复杂的算法。同时,这些系统需要依靠电池电量,还要保持尽可能最小的封装。通常,物联网设备和可穿戴设备中的可用钮扣电池的容量限制在几十或几百毫安小时,同时不会在物理上限制物联网设备或可穿戴设备本身。即便如此,用户仍希望在与传统替代品一致的设计中,电池续航时间能达到数天。
要满足这些多样化的要求,必须在不影响功能的情况下,使用能够最大限度地降低功耗的设备。事实上,智能产品设计的功耗/性能特点密切反映了这些设计核心 MCU 的功能。然而,特定 MCU 的适用性很少能通过一些规格书的规格要求来衡量。虽然业界多年来一直关注电流消耗,但 MCU 的电流规格以 μA/MHz 表示只能说明部分情况。其实际功耗是最有说服力的参数,因此低 μA/MHz 和供电电压的组合成为实际应用的关键指标。
最终,即使最接近的 MCU 规格检查也必须让步于每个应用的特定要求。例如,在仅需要间歇性更新传感器测量值的应用中,因此减少了 MCU 占空比,因此有功功率甚至可能不是最重要的规格。减少占空比意味着并不是连续工作在有功模式下,而是 MCU 更多时间处于较低功率的休眠状态。因此,休眠状态功耗、唤醒时间和 SRAM 保持功率上升为关键参数。同时也会考虑 MCU 特性,例如集成在这些 MCU 中的大存储器阵列和多个外设。
除了支持越来越大的软件库之外,更大的集成存储器实际上有助于减少与外部设备的片外访问相关的功耗和性能延迟。同时,开发人员可利用 MCU 的电源管理特性和数据保持功能,在处理器内核本身处于休眠状态时,优化电源和保持状态。
高级 MCU 中的电源管理功能在降低外设选件功耗方面具有显著优势。这些 MCU 中内置的先进电源管理器可以选择性地启用或禁用外设,甚至允许以“休眠运行”方式实现对 MCU 中外设的持续操作。这里意指,即使 MCU 处于节能休眠状态,也可以进行涉及外设的操作。
过去,开发人员经常发现他们必须在影响功耗和功能的各种因素之间作权衡。相比之下,Maxim Integrated Darwin MCU 系列就提供了这些所需的功能,可应对可穿戴设备和其他低功耗设计不断增长的挑战。
平衡功率和性能
Darwin MCU 系列专为满足物联网设计要求而设计,由一系列器件构成,包括 Maxim MAX32620、MAX32625 和 MAX32630。Darwin MCU 围绕带有浮点单元的 Arm® Cortex®-M4 构建,共用一个结合了各种外设、时钟、实时时钟 (RTC)、看门狗定时器等器件在内的硬件基础。
各个 Darwin MCU 不同之处在于,提供的片上闪存和 SRAM 选择不同。MAX32620 和 MAX32630 集成了 2 MB 闪存,而 MAX32625 则提供 512 KB 闪存。开发人员还可以找到一系列支持的片上 SRAM,MAX32630 为 512 KB,MAX32620 为 256 KB,MAX32625 为 160 KB。
这些器件还具有在完全活动模式下消耗最小电流的共同能力:102 µA/MHz (MAX32620)、106 μA/MHz (MAX32625) 和 106 μA/MHz (MAX32630)。如前所述,功率是关键规格,这些器件的工作电压就较低,内核为 1.2 伏,I/O 为 1.8 至 3.3 伏。因此,完全活动模式下的功耗仍然很低。它们提供了许多机制支持低电压操作,允许开发人员进行优化,以在其应用中实现低功耗。
因为最大限度降低功耗的能力对电池供电设备的长期运行至关重要。对于大多数应用来说,这意味着在不牺牲响应时间的情况下,最大限度地降低占空比。对于开发人员来说,这些相互冲突的要求可利用 Darwin MCU 低功耗模式找到解决方案。
该 MCU 的 LP0 最低功耗状态使设备处于静态模式,这时会禁用所有设备电路,但与电源定序器、上电复位、供电电压监视器、RTC(如启用)和数据保持寄存器相关的电路除外。LP1 则提供功耗极低的待机模式,在保持 SRAM 和寄存器供电的同时,使 CPU 处于休眠模式。在 LP0 和 LP1 两种模式下,CPU 内核本身一直会处于静态,直至中断导致其上电。
第三种功耗模式是 LP2,会让内核保持休眠状态,但如下所述,该模式提供了一种操作 MCU 外设的重要机制。最后一种模式是 LP3,即正常运行状态,此时处理器和外设获得供电,并以选定的时钟速率运行。
与 LP3 相比,LP2 可大幅降低功耗(图 1)。通过将时钟从标称的 96 MHz 速率降到 4 MHz,设计人员可以实现更高的节能效果(参见图 1,右图)。最重要的是,此类功耗降低可以在不损失关键外设功能的情况下实现,如下文详述。
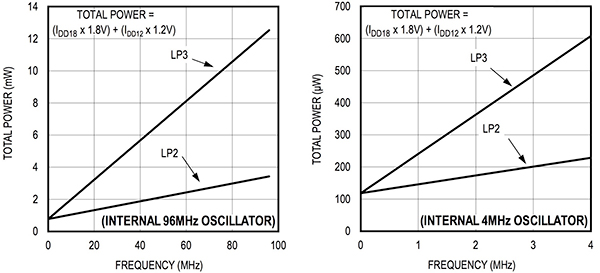
图 1:Darwin MCU 电源生态系统允许开发人员在从完全活动的 LP3 模式转换到 LP2 模式时显著降低功耗,并通过将时钟速率从标称的 96 MHz(左)降低到 4 MHz(右)而进一步节省功率。(图片来源:Maxim Integrated)
在内部,Darwin MCU 的不同功耗模式依赖于一组复杂的功能元件。例如,在 LP0 和 LP1 期间,电源定序器可有效控制 MCU。同时,片上定时器、设备外设、GPIO 引脚甚或设备的内置供电电压监视器的中断都可触发系统重启(或在供电电压失效时重置设备)。但是,尽管存在这种潜在的复杂性,开发人员仍会发现一个简单功耗模式工作模型。
在典型应用中,开发人员可以通过编程将 MCU 置于低功耗模式,直到发生 RTC 超时或中断(图 2)。
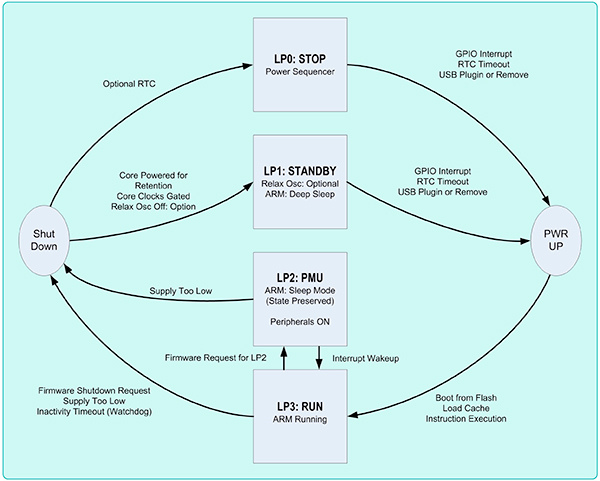
图 2:LP2 的外设管理单元 (PMU) 的功耗节省方式是:通过在外设和存储器之间移动数据以及执行其他功能时,让 MCU 进入休眠状态。(图片来源:Maxim Integrated)
虽然开发人员可以使用 LP0 和 LP1 模式来实现最低功耗状态,但 LP2 可在 CPU 内核仍处于休眠模式时,在支持外设功能方面提供极大的灵活性。此功能的关键在于设备的外设管理单元 (PMU)。
外设管理
Darwin MCU PMU 本身就是一个智能控制子系统。这种基于直接存储器访问 (DMA) 的单元提供跨六个独立通道的轮询调度能力,允许独立于 CPU 进行多个外设操作。利用其 DMA 功能,PMU 可以在外设和存储器之间移动数据,甚至可以同步脉冲串信号、模拟测量值和其他事件。在 LP2 中(也称为 PMU 模式),PMU 在内核保持休眠状态的同时,使用其状态机有效控制设备支持外设操作。
通过设置适当的寄存器,开发人员可实现功能和功耗之间更精细的平衡控制。实际上,开发人员可以对 LP3 中的外设操作进行相同的控制。虽然 PMU 以 LP2 模式使用时能够实现低功耗操作,但它以 LP3 模式使用时,能够让外设处理原本会增加处理器负担的操作,从而减少处理器负载。在这两种情况下,开发人员都可以通过编程方式启用或禁用设备上的单个块(图 3)。
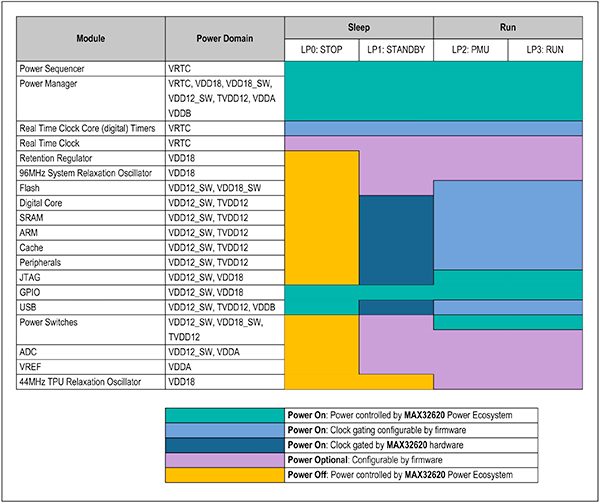
图 3:PMU 可用于启用或禁用设备上的单个块,以便在运行时节省功率。(图片来源:Maxim Integrated)
开发人员可以使用三个 32 位寄存器 CLKMAN_CLK_GATE_CTRLn(n = 0、1、2)对块激活进行编程,这些寄存器可提供对单个功能块的精细控制,从而控制整体功耗。实际上,开发人员可以选择自己实现这种控制,或依靠 MCU 的动态时钟选通电路自动启用或禁用外设来实现此控制。
例如,Darwin MCU 架构专门采用一个 SPI 主控制器,在芯片内执行 (XIP) 操作期间作为外部闪存和 CPU 之间的接口。只要 SPI XIP (SPIX) 操作处于非活动状态,MCU 的动态时钟选通机制就会自动禁用 SPIX 外设。开发人员可以使用 CLKMAN_CLK_GATE_CTRL0 寄存器中的位 21:20 来控制此行为,将位 21 设置为“1”以强制 SPIX 时钟始终保持活动状态,将位 20 设置为“1”以启用动态时钟选通,或将两者都设置为“0”以完全强制禁用 SPIX 时钟。
对于诸如片上模数转换器 (ADC) 之类的模块,开发人员还可以明确地控制外设的供电。例如,要使用 ADC,开发人员首先通过将 CLKMAN_CLK_GATE_CTRL2 中的位 12 设置为“1”来启用 ADC 的时钟选通,设置各个位以启用接口,然后通过设置 ADC_CTRL 寄存器中的位 1 来为 ADC 上电。这种独立运行 ADC 的能力在 LP2(PMU 模式)模式下特别有效。由于处理器内核在 LP2 模式下处于休眠模式,因此本底噪声处于最低水平,使开发人员能够执行敏感的模拟信号采集。
另一项 ADC 特性是使开发人员能够将 CPU 占空比降至最低。开发人员可以通过编程方式设置 ADC 采样的上限和下限,仅在采样超出所需窗口值时生成唤醒 CPU 的中断。开发人员可以使用此功能将 CPU 保持在节电休眠模式,直到采样的传感器数据发生重大变化,而不是通过周期性地唤醒 CPU 来轮询传感器有关测量样本中的重大变化。
对于数据采集,ADC 支持四个外部模拟输入多路复用到其内部 10 位三角积分转换器。对于其中两个输入通道,分压器允许开发人员将输入信号按比例缩小五倍。
不过,开发人员经常需要通过外部信号调节来放大或单纯缓冲模拟信号。在这种情况下,设计人员可以通过利用 Maxim Integrated 的 nanoPower 系列低功耗模拟器件来保持低功耗运行。例如,Maxim MAX40007 nanoPower 运算放大器具有 110 dB 大信号电压增益(3 伏 VDD),但功耗仅为 700 纳安 (nA)(典型值)。该运算放大器能够驱动高达 20 皮法 (pF) 的容性负载。相比之下,Darwin ADC 的对地电容仅为 1 pF,其动态开关电容为 250 纳法 (nF)。
像 MAX40007 这样的 nanoPower 器件在基于 Darwin MCU 的设计中特别有效。开发人员可以用为 MCU 供电的相同 1.8 伏或 3.3 伏电源轨来为这些元件供电。但在过去,由于支持这些多电源轨,使得它们无法满足低功耗和最小设计封装的要求。随着多输出 PMIC 的推出,设计人员可以轻松支持多电源轨器件,而不会影响总体要求。
电源管理
对于电池供电型设计,那些用于提供供电电压的传统技术可能并不足够。例如,在将单节锂离子电池的标称 3.6 伏输出转换为当前低压 MCU 所需的较低电平时,通常用于提供不同电压轨的线性稳压器会浪费大量电能。支持多个独立供电电平的需求只会加剧对功耗、零件数量和复杂性的影响。相比之下,Maxim Integrated 的 MAX77650 为多电压轨电池供电设计提供了完整的电源管理解决方案。
MAX77650 的电源管理架构结合了单电感器、多输出 (SIMO) 降压升压稳压器与低压差 (LDO) 稳压器(图 4)。Maxim Integrated 提供了可利用多个 GPIO 扩展此架构的选项,以及一个可编程为 250 至 425 毫安 (mA) 的电流阱驱动器,以支持专用便携式设计中使用的红外 LED 等设备。
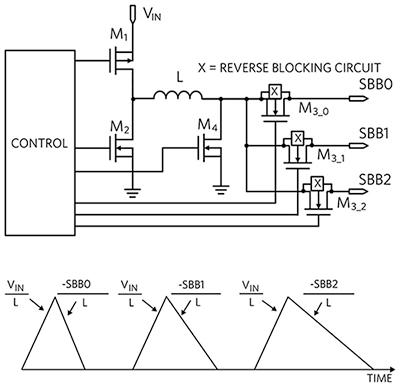
图 4:MAX77650 中使用的这个单电感器多路输出 (SIMO) 降压升压稳压器仅需一个电感器,即可选通到各个输出引脚的输出(见图上部)。选通一个后按顺序为下一个输出增加电感器电荷(见图下部)。(图片来源:Maxim Integrated)
作为 PMIC 架构的核心,SIMO 稳压器采用选通机制,只需一个外部电感器即可提供 Darwin MCU 和其他器件所需的多个电源轨。在 SIMO 稳压器中,控制电路通过单独选通的输出对单个电感器放电(见图 4 上部)。在操作中,SIMO 稳压器按顺序为每个输出增加电感器上的电荷(见图 4 下部),从而实现对每个输出的可编程控制。
估算电池电量
为了将隐形智能构建到电池供电产品中,设计的最后一步有关电池本身。在这些设计中,准确估算剩余电池容量对于避免意外断电至关重要,因为意外断电可能直接导致用户忽略产品的其它优势,对整个产品不满。
虽然 MAX77650 等 PMIC 负责充电过程,但智能产品需要对电量进行可靠的估算,以便在电池需要充电或更换时通知用户。传统的电量计设备长期以来一直扮演着这个角色,但它们的低精度和高功耗通常无法满足期望。
更先进的电量计 IC 如 Maxim Integrated MAX17048 和MAX17055,为开发人员提供了极大的灵活性,既可以满足功耗和复杂性方面的设计目标,同时不会影响准确预测电池充电状态 (SOC)。
过去,主要的 SOC 测量方法依赖开路电压 (OCV) 测量或库仑计数。单独使用时,每种方法都各有显著的取舍之处。OCV 测量受电池电流的显著影响;库仑计数在短期内可提供良好的精度,但其精度会随着时间的推移而降低。每种方法在设计层面也有不同的折衷之处。OCV 测量需要一定量的电池表征来建立补偿表;库仑计数需要额外的电阻器来测量流入和流出电池的电流。
Maxim 的电量计 IC 在这两种方法上均有所改进。MAX17048 执行 Maxim 的 ModelGauge 算法,通过估算方法扩展了 OCV 技术。与其他基于 OCV 的方法一样,MAX17048 无需额外的电流检测电阻。虽然该器件包括预装电池模型,但开发人员可能需要执行电池表征以获得最佳精度。不过,该器件特别适用于功耗预算非常紧张的设计。正常操作期间,其在低功耗“休眠”模式下仅消耗 3μA 电流。在这一模式下,该器件继续提供准确的 SOC 估算,但更新速率减缓到每 45 秒更新一次,而相比之下活动模式中为每 250 毫秒 (ms) 更新一次。
与任何基于 OCV 的方法一样,对 SOC 的估算仍然受到负载瞬变和其他因素的影响。通过 MAX17055,Maxim Integrated 提供了 ModelGauge m5 算法,该算法使用 OCV 方法校正了库仑计数的长期漂移(图 5)。
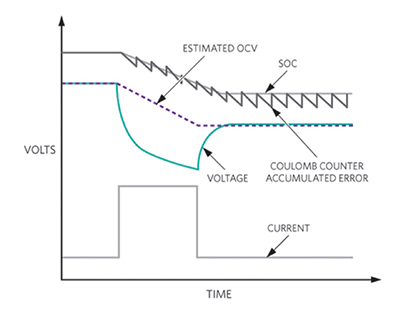
图 5:诸如 Maxim MAX17055 之类先进电量计 IC 结合了开路电压 (OCV) 和库仑计数法,可在电池的整个生命周期内提供非常精确的结果。(图片来源:Maxim Integrated)
MAX17055 采用这种方法,并借助一个外部 Rsense 电阻器和一些电容器,提供了一种非常精确的电量计(图 6)。与 MAX17048 一样,该器件提供休眠模式,可将功耗降至 7 μA 而不会损失功能。在此情况下,休眠模式每隔 5.625 秒执行一次更新,而不是像完全活动模式那样每隔 175.8 毫秒执行一次更新。
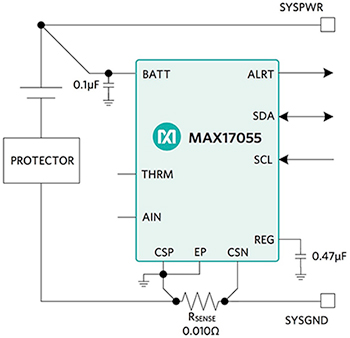
图 6:开发人员可以使用 Maxim MAX17055、一个外部检测电阻和一些电容器来实现非常精确的电池电量计功能。(图片来源:Maxim Integrated)
另一款 ModelGauge m5 电量计选择集成了 Rsense 电阻器,且对封装的影响很小,具体尺寸为 2.132 mm2,相比之下采用类似 9 引脚晶圆级封装 (WLP) 的 MAX17055 则为 2.115 mm2。Rsense 集成选择在提供相同的 5.6 秒更新速率的同时,使休眠工作模式下的电流消耗降至仅 5.2 μA。
尽管需要外部 Rsense 元件,但 MAX17055 电量计 IC 与 MAX77650 PMIC 及其单个电感器相结合,可提供节省空间的设计(图 7)。Maxim Integrated 在其基于 MAX32620 的 MAX32620FTHR 开发板中,将此组合用作电源子系统设计。
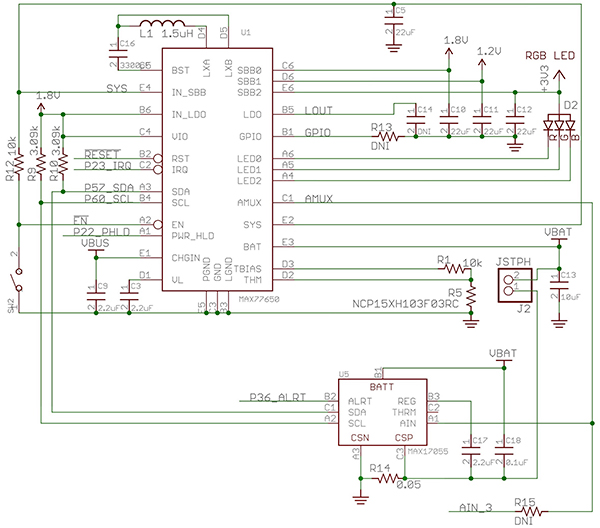
图 7:Maxim MAX77650 PMIC 和 MAX17055 电量计 IC 结合使用后,可提供一个复杂的电源子系统,其设计简单,只需要 PMIC 的单电感器 (L1)、一个电量计 Rsense 电阻 (R14)、一个Murata Electronics NCP15XH103F03RC NTC 热敏电阻、电阻器和电容器。(图片来源:Maxim Integrated)
除了 MCU、PMIC 和电量计器件,该电路板仅需要 PMIC 的单电感器 (L1)、一个电量计 Rsense 电阻器 (R14)、一个 Murata Electronics NCP15XH103F03RC NTC 热敏电阻、电阻器和电容器。如此即可在一个仅为 0.9 英寸 x 2.0 英寸的封装中,提供两个 12 针插座连接器、两个 RGB LED 和两个按钮。开发人员可以通过其 micro USB 连接器或通过 2 mm 连接器连接电池,为电路板供电。
总结
为满足用户对智能产品的期望,电池供电型设备需要在外观和可用性方面与更多传统产品保持严格匹配。对于设计人员来说,若要满足这些限制,意味着要在不牺牲构建更智能产品所需性能的情况下,最大限度地降低功耗和设计尺寸。
开发人员可以使用 Maxim Integrated 的 Darwin MCU、SIMO PMIC 和高级电量计 IC 应对这些经常相互冲突的设计要求,以用户熟悉的外形和功能来实现这些复杂的能力。
-
mcu
+关注
关注
146文章
17572浏览量
356069 -
物联网
+关注
关注
2920文章
45479浏览量
382415 -
无线
+关注
关注
31文章
5499浏览量
174592 -
可穿戴
+关注
关注
4文章
768浏览量
85812
发布评论请先 登录
相关推荐
转:32位低功耗MCU设计
如何选择超低功耗MCU
选择超低功耗MCU的方法
选择低功耗 MCU
关于MCU的低功耗问题
低功耗MCU设计理念

MCU低功耗设计(三)产品
RM0377_超低功耗 STM32L0x1 高级基于 Arm ® 的 32 位 MCU





 工商网监
工商网监
评论