 人工智能深度学习算法在工业机械臂上的应用
人工智能深度学习算法在工业机械臂上的应用

从功能上来说,你这个应用非常适合采用深度学习,事实上,深度学习本质上就是用来做分类识别的,尤其是针对零件与零件之间,图像上差异比较小的时候(比如你需要自动分拣A,B,C三种零件,但其形状差别很小),更加适合用深度学习。
不过深度学习也存在它的问题:
训练的样本要足够大,具体多大合适,要看你对图像区分度的要求。如果样本不是很充分的情况下,比如数千张或更少,其实也可以考虑用传统方式,比如SVM。我用传统方式做过宝马车标,安全帽等的识别,准确度相当高了,尤其是车标识别,接近100%准确,而我只用了不到100张做训练,而且无论算法还是模型库都不大,很适合做嵌入式,而且可以做到实时。
对深度学习而言,速度/性能是个很大的问题,不知道题主的机器性能如何,以及对应的图片分辨率,是否要实时处理?我估计题主应该是那种实时高清识别,而且有可能是嵌入式设备,我们姑且认为视频是直接从本机采集,不需要做解码,即便如此,基于深度学习的运算量也是很高的,尤其是resnet这种,一般而言,层数越多越精准,运算量也会越高。高清情况下(机器视觉应用一般会1080P或更高),我个人认为单张图片的识别时间会超过1秒,很难做实时。有朋友在256核的TX1上测试过标清的FAST RCNN,单张处理时间为0.6秒左右,我本人测试过googlenet,在一台阿里云E5的机器上(无GPU),识别一张720p的图片,估计约0.3 - 0.5秒左右(我的应用需要考虑网络传输的时间,没打log,只是通过返回结果大致估计)。无论哪种情况,离每秒25帧的实时要求都差得太远。
结论:
嵌入式设备,个人不建议用深度学习,除非你能将密集运算部分移植到FPGA上,否则性能会是个很大的问题。
高清和实时的应用,一般而言也不建议用深度学习,理由同上。
对于区分度要求很高(种类很多,很相近),非实时的应用,基于后端或云端的业务,有足够的运算资源。特别适合用深度学习。
能解决问题才是王道,传统方式未必不可以。
强烈建议题主关注一下,深度学习领域芯片相关技术的进展,比如谷歌的TPU,国内的寒武纪,以及轻量级框架mxnet等。
举一个具体的实例:
深度学习应用于工业机械臂的控制,这也是 Industry 4.0 的发展方向。
将深度学习算法应用到工业机器人上,拿来做商品或者零件分拣,大概可以分为「分类」和「捡起」两步:
(1) 对商品或者零件进行「分类」
这个步骤非常适合使用深度学习,因为深度学习本质上就是用来做分类识别的。
(2) 将商品或者零件「成功捡起」
对于单个商品或者零件,要想将其成功捡起,关键是选择合适的把持位置,通俗的将,就是机器人夹零件的哪个地方,可以使零件不下滑,从而成功地被捡起来。比较典型的算法,一个是採用两阶段的深度学习算法,第一阶段通过小型的Neural Network,检测出数个可以把持的位置,第二阶段採用大型的Neural Network,对第一阶段得到的各个把持位置候选进行评估,选择最终的一个把持位置。这种算法的成功率大概能达到65%。
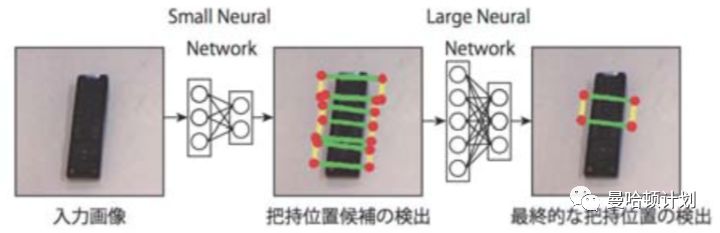

(上图显示了第一个阶段得到多个候选把持位置,第二阶段得到最终把持位置)
另一个是结合了深度学习和Heterogeneous Learning,将把持位置的信息(width, height, x, y, θ)以及把持该位置时成功捡起零件的成功率“Graspability”用来训练模型,模型如下:
下图表示的是把持位置的信息(width, height, x, y, θ)的定义,以及各把持位置对应的Graspability Label。
下图是Positive和Negetive教师信号的例子。
下图是得到的最终把持位置,可以达到85%左右的成功率。
对于多个商品和零件堆积在一起的情形,除了把持位置的选择,还需要选择合适的抓取顺序,即先抓取哪一个零件,后抓取哪一个零件,这时可以採用Reinforcement Learning算法,最终可以达到约90%的成功率,和熟练工人的水平相当。当然,要将这些成果大规模应用到工业流水线上,还需要考虑到正确率要求更高(一般是99.9%),以及速度要求更快等,目前许多改进就是围绕满足这两点指标来进行的。
-
人工智能
+关注
关注
1820文章
50325浏览量
266967 -
深度学习
+关注
关注
73文章
5608浏览量
124635
原文标题:人工智能深度学习的算法可以应用到工业的机械臂上吗?
文章出处:【微信号:gh_599f8b397756,微信公众号:曼哈顿计划】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
嵌入式人工智能课程(华清远见)
海光信息深度参与人工智能赋能新型工业化深度行活动
【智能检测】基于AI深度学习与飞拍技术的影像测量系统:实现高效精准的全自动光学检测与智能制造数据闭环
人工智能与机器学习在这些行业的深度应用
人工智能+工业软件:智能仿真加速赋能产业变革
航天宏图人工智能技术深度赋能社会治理现代化

利用超微型 Neuton ML 模型解锁 SoC 边缘人工智能
深度学习对工业物联网有哪些帮助
挖到宝了!人工智能综合实验箱,高校新工科的宝藏神器
挖到宝了!比邻星人工智能综合实验箱,高校新工科的宝藏神器!
超小型Neuton机器学习模型, 在任何系统级芯片(SoC)上解锁边缘人工智能应用.
人工智能究竟对电子产业产生哪些的影响?

最新人工智能硬件培训AI 基础入门学习课程参考2025版(大模型篇)
【新品发布】嵌入式人工智能实验箱EDU-AIoT ELF 2正式发布




评论