 深度探析V2X与ITS的发展史
深度探析V2X与ITS的发展史

V2X可以简单分为两大类,一类是以智能交通(ITS)为核心的,发起者自然是政府机构。另一类是以智能驾驶为核心的,发起者主要是汽车厂家和电信运营商。另一种分法就是按通讯方式,一类是DSRC,一类是C-V2X。DSRC主要是针对智能交通应用的,欧美日都选择以DSRC的智能交通技术路线,某种意义上讲DSRC与C-V2X并非水火不容,C-V2X更侧重智能驾驶。
早在1994年,美国高速公路管理局推出先进高速系统AHS研究课题,1997年成立智能汽车计划小组研究智能交通,2005年完成研究任务,提出了完整的ITS体系。同时在1999年,FCC就为ITS划分了一个5850MHz-5925MHz频带,决定用当时最先进的基于802.11a的技术。并分成七个独立的频道,分别为频道172、174、176、178、180、182、184;各频道均为10MHz。频道178为控制频道(Control Channel,CCH),负责WAVE服务广播讯框(WAVE Service Advertisement,WSA)封包;其他频道则为服务频道(Service Channel,SCH),只能传递WAVE短信息(WAVE Short Message,WSM)封包。

同时在2003年,全球八大车厂丰田、日产、福特、通用、戴姆勒、克莱斯勒、大众、宝马成立VSCC车辆安全通讯联盟开展DSRC车端的研究,2005年通用演示了第一个V2V系统。之后经过8年的完善,2013年DSRC形成了完备的体系。
2014年2月,欧洲标准组织ETSI与CEN宣布完成第一阶段基于DSRC的ITS标准,底层为IEEE 802.11P,上层为IEEE1609,同时还有SAE J2375和J2945两个标准定义通讯格式。
2014年8月,美国交通部试图强制立法推广DSRC为核心的ITS,但直到今天也没用完成强制立法。

DSRC的IEEE 1609标准架构
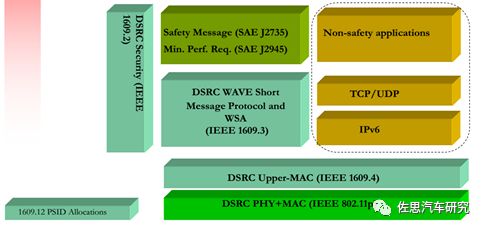
DSRC架构标准
欧洲方面,ITS系统源自1973年英国运输与道路研究所(TRRL)的SCOOT(Split, Cycle and Offset Optimization Technique),更早SCOOT模型基础原自TRANSYT (TrafficNetwork Study Tool),采用了同样的周期流分布图(CFP)的建模方式和相近的目标函数。不过有了显著的改进,TRANSYT的CFP是以历史的平均交通流计算的;而SCOOT是联机模型,CFP是实时测量的。
SCOOT的核心就是如何控制交通信号灯,中国的北京、青岛、成都、重庆、大连就采用西门子的SCOOT系统。 当时的技术无法利用传感器高效计算实时交通流量,因此意义不大。但这是ITS的基础方法论,SCOOT后来被德国西门子全盘继承,并衍生出SPAT(Signal Phase and Timing)。 SCOOT是跨整个路网进行交通号志变换时机的最佳化,仅倚赖工程师预先以固定且有限数量的可行程序进行配置,无法弹性对应即时路况与个别交叉路口的流量变化。
西门子在2018年推出Follow AI也就是下一代SCOOT,它首先会建立复杂的一般性规则,接着可针对每个特定的交叉路口进行个性化的适地性处理,Flow AI根据内建的回环(loop)侦测即时的交通流,并运用云端AI即时产生近乎无限数量的交通号志变换时机选项。
欧洲ITS标准主要分5个工作组 (WG).
WG1 (Application Requirements and Services):ITS中基础应用需求与服务,并制定Applications与Facilities两层之通讯协议。
WG2 (Architecture and Cross Layer):发展适合所有ITS之通讯架构与跨层管理协议,并扮演欧洲ITS通讯架构之协调者角色。
WG3 (Transport and Network): 规范Networking和Transport两层之协议,并利用车载网络特有之地理位置信息特性,发展制定GeoNetworking及IPv6相关协议。
WG4 (Media and Medium Related): 规范MAC和PHY两层相关之标准,其将欧洲ITS使用之频谱划分为ITS-G5A、ITS-G5B与ITS-G5C三个部分,并兼顾其中之兼容性。
WG5 (Security):制定ITS相关之安全性议题,此草案为车载安全通讯标准制定之基准,规范车载环境中威胁、弱点与风险分析,该草案已于2017年3月正式出版。
目前ETSI正着手制定第二版标准,主要涵盖更多使用案例(Use Cases),包括自动跟车(Platooning)、协同式可适应性巡航控制(Cooperative Adaptive Cruise Control, C-ACC),以及弱势道路使用者(Vulnerable Road Users, VRU)等。
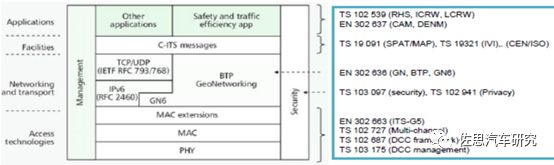
欧洲ITS标准框架
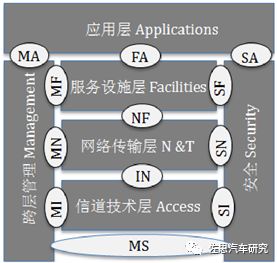
欧洲ITS的OSI模型
信道技术层( Access layer):本层提供物理层与介质访问控制层服务,对应 OSI通信协议模型的物理层和数据链路层。
网络传输层( Networking &Transport layer):本层提供数据路由与传输服务,对应 OSI 通信协议模型的网络层和传输层。
服务设施层( Facilities layer): 本层为多个应用提供高层数据传输协议与信息管理服务,对应 OSI 通信协议模型的会话层、表示层和应用层。
除此之外, ITS-S 还分为以下功能层:
应用层( Application layer): 应用层模块表示 ITS-S 应用程序利用 ITS-S 的服务来连接一个或多个其他 ITS-S 应用程序。两个或多个互补的 ITS-S 应用程序组成了一个向 ITS 用户提供服务的应用。
管理层( Management layer):负责管理 ITS-S 的通信以及站内数据交换服务。
安全( Security Entity):为 OSI 通信协议栈各层提供安全服务。

CAM与DENM是智能交通系统中最重要的两种信息协议栈标准。
Decentralized Environmental Notification Message,分散环境通知信息,主要用于道路危险预警应用,是事件触发型信息,一旦通过车载设备检测到了安全隐患事件(例如前方车辆紧急刹车、道路施工警告等),车载ITS的相关应用就立即发射DENM信息。接收车辆可对比车辆自身位置与行车路线,判断事件对自车的关联性并预测可能的碰撞风险,以及提前通知驾驶员采取有效的措施。根据事件地点和类型,可能要求接收到DENM信息的车辆向外转发。
CAM(Cooperative Awareness Message),合作感知信息,这是时间触发信息,提供车辆的速度、位置、方向灯以及交通信号系统如交通信号灯的状态,天气提醒等信息。
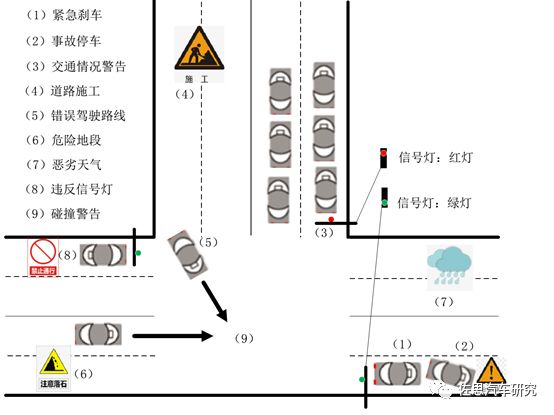
ETSI 在 2013 年发布了道路危险警告( RHW) 应用 , ITS-S 通过 RHW 应用检测到道路危险情况并触发生成相应的 DENM 消息,之后 ITS-S 会将这一 DENM 消息发送出去,通知一定区域范围内的其他车辆。
1、 原始 ITS-S 检测到事件后要生成描述该事件用例的 DENM 并将其发送给该用例对应的目的区域内的其他 ITS-S。
2、 DENM 传输的开始和终止由应用层的 ITS-S 应用程序控制。
3、 只要事件存在, DENM 就会持续发送。
4、处在目的区域内的 ITS-S 需要将接收到的 DENM 转发给其它 ITS-S。
5、 DENM 传输过程的终止, ITS-S 判断 DENM 的有效期字段, 在到达 DENM 有效期时 ITS-S 停止发送该消息, 或者在未到达有效期时但已经检测到危险事件已经解除则可以由 ITS-S 应用程序请求生成一个通知事件已经终止的 DENM。
6、 若收到 DENM 的 ITS-S 根据消息内容判断事件与自身有关,则做出适当的警告给使用者。
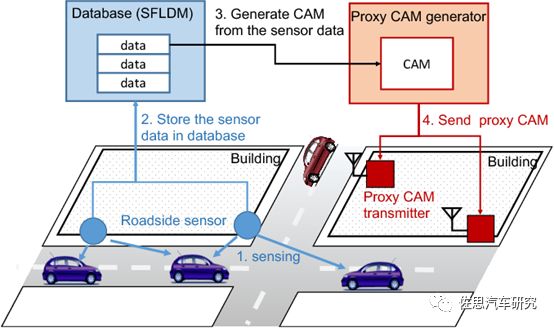
这个CAM应用类似于长沙智能驾驶研究院发布的“V2X+交叉路口”解决方案,能够车载传感器所不能覆盖的范围,也就是NLOS。
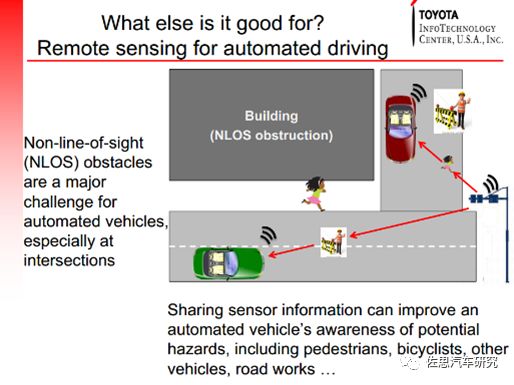
不同的是欧洲早在2011年就已经做了完整的技术规范。路侧传感器可以是摄像头、毫米波雷达或激光雷达。激光雷达最合适,因为能见度差的情况下反而是最易发生交通事故的时候。1550纳米波长的激光雷达几乎可以像毫米波雷达那样全天候工作,同时激光雷达的分辨率较高。
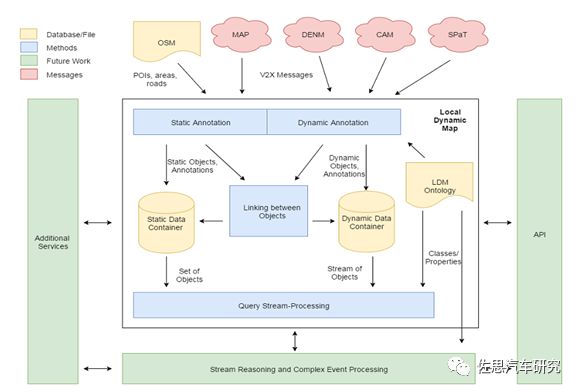
欧洲ITS整体框架
这其中承载整个系统的关键是LDM,即Local Dynamic Map。

典型LDM的4层结构,最上层基本就是V2X信息。欧洲ETSI在2014年对LDM做了详细标准,也就是ETSI EN302895 V1.1.1,车辆通讯基础应用设置之LDM。
-
智能交通
+关注
关注
12文章
853浏览量
45258 -
V2X
+关注
关注
26文章
219浏览量
45159
原文标题:V2X与ITS的前世今生
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
V2DIP2 - 32 VNCL2 - 32Q开发模块深度解析
深度解析MSP430G2x11与MSP430G2x01微控制器
MSP430F22x2/MSP430F22x4 混合信号微控制器深度解析
智驾进阶之路:V2X打通车与万物互联,航芯安全芯片守护产业行稳致远

新能源汽车V2X通信模块:Fakra连接器与传统射频接口的兼容性设计方案

智能座舱与V2X车联网发展加速:汽车电子射频连接器可靠性测试标准解析

FDC2x1x系列电容数字转换器深度解析
Qorvo UWB和V2X技术构筑车联网安全防线

深度剖析SN65HVD2x:RS - 485通信的理想之选
1分钟秒懂v2x车联网技术
聊聊倒装芯片凸点(Bump)制作的发展史

高通斥资数亿美元收购Autotalks公司,推进车联网部署

科普|V2X是什么意思?

技术预见者的实践之路:C-V2X发展五年记



评论