 如何实现全场景动态实时厘米级高精度定位
如何实现全场景动态实时厘米级高精度定位
传统车载导航系统都是基于导航卫星进行单点定位,帮助驾驶员到达目的地,定位精度是5-20米。随着自动驾驶系统的使用率提高,例如,车道偏离预警(LDW)、自适应巡航控制(ACC)、自动泊车、自动驾驶,安全性和可靠性需要更高的定位精度。
自动驾驶行业面临的主要挑战之一是缺乏可靠高精度定位方案。对于无人驾驶汽车从Demo测试,进入到公开道路测试甚至到商业化落地运营,安全性是首要任务。
高精度定位技术也将是自动驾驶作为安全可靠的交通工具得到公众认可之前的最后一块拼图。
不过,高精度定位技术并不是什么新鲜事。这项技术已经发展几十年,但设备成本高,阻碍了这项技术在自动驾驶这个利基市场的扩张。
高精度定位技术,除了实时告知车辆位置,还可以用来校准车辆的传感器。只有有了这样的系统,才有可能符合ISO26262所要求的自动驾驶车辆的安全要求。
众所周知,传统汽车的功能安全主要是在车辆内部,而定位感知则主要来自车辆外部,这就带来了传统功能安全的外延在加大。从完整性功能安全角度,包括高精度定位在内的技术,都需要对其数据输出提供较高的置信度。
“未来的自动驾驶有一个不可或缺的一部分,就是高精度定位。”在星舆科技高精度定位首席研究员杜洪伟看来,环境感知层如何实现全场景动态实时厘米级高精度定位是一个非常关键的问题。
一、满足自动驾驶的高精度定位
目前,自动驾驶定位方案可以分为绝对定位和相对定位。绝对定位输出定位信息是基于统一的定位坐标体系下的位置,相对定位输出的是区域内的相对位置信息。
绝对定位的方案,当前都是基于卫星的定位手段,相对定位比较常用的是依靠激光雷达,毫米波雷达,摄像头这些传感器,都是相对定位的技术。
按照L4/L5级自动驾驶的定义要求,自动驾驶车辆需要知道它在哪里,定位精度需要在10厘米以内级别。
众所周知,目前自动驾驶的几种常用传感器都有自己的特点,毫米波雷达在很多的场合是很容易受到干扰。摄像头对于光线比较敏感,对于光线比较昏暗或者光线比较亮的场景下,可靠性达不到自动驾驶的要求。激光雷达成本是非常高昂,在雨雪还有积水恶劣条件下,可靠性降低。而基于卫星的定位,受周围环境的影响比较严重,特别是在障碍物遮挡的领域,定位精度不可靠。
任何单一的传感器技术都满足不了自动驾驶的需求,因为每种传感器都有自己的优缺点。要想实现未来的车与路,车与人,车与车之间的信息交换,达到自动驾驶更高级别安全性的要求,当前的技术方案都有一定的缺陷性。
二、高精度定位的痛点
在杜洪伟看来,自动驾驶高精度定位主要有三大方面的痛点,第一,定位精度有待提升,当前很多的方案的定位精度不能达到厘米级。
第二,复杂场景可靠性有待提升,高架桥,室内、隧道等等这些场景很多方案还不具备这样一个能力。
第三,实时性有延迟。实时性不好,会降低定位的精度。举个例子,一辆时速72公里的汽车,每一毫秒行驶的距离是2厘米,如果它的延迟能达到10毫秒,仅仅是延迟带来的定位误差就会达到0.2米。由此也可以看出实时性对未来自动驾驶还是要求比较高的。
近年来,行业内也出现了各种不同的定位技术方案,但很多定位技术的方案满足不了L4或者L5高精度定位的要求,所以必须要有下一代的高精度定位技术,替代传统定位技术。
下一代的高精度定位技术应该具备三个特点:
第一是全场景,需要满足各种复杂的场景,包括室内外。
第二是高精度,精度达到可靠的厘米级。
第三是定位结果必须稳定可靠,不能一会精度比较可靠,一会精度又不可靠,这会出现严重的安全性问题。
三、多源融合是出路,低成本是关键
自动驾驶汽车肯定需要绝对定位。
从《高工智能汽车》的调研来看,融合在定位技术方案上也是一大趋势,自动驾驶系统需要一个“盒子”,一方面提供车辆实时精准定位以及所有需要的性能。同时,它还能与其他类型的传感器进行融合。
对于高精度定位市场来说,传感器融合有很多好处,包括降低成本,提高性能以获得更好的位置或位置的可用性,增加可靠性和鲁棒性。
未来的高精度定位系统通过结合不同类型传感器,比如IMU、轮速传感器、GNSS传感器、摄像头和激光雷达的各种优缺点,将这些传感器输出融合成一个具有多种用途的大数据集,充分展示了传感器数据融合的威力。
星舆科技提出的下一代定位技术,就是指基于“RTK+IMU+视觉+高精度地图”的多源融合技术路线。
2019年1月16日晚,星舆科技获得《2018高工智能汽车年度金球奖评选》年度国产高精度定位方案商奖项。
关于成本的问题是这个领域的主要因素。设计人员必须能够同时集成安全性、性能和复杂性,而不需要在每个方面进行任何权衡,这将影响硬件和软件设计。
从OEM厂商的量产角度来说,就是要求低成本的高精度定位技术方案,把成本控制在千元级别。
杜洪伟表示,星舆科技的定位就是研发低成本的高精度定位技术方案,把不同的传感器通过数据的深度融合,从空间和时间的纬度进行深度融合,可以满足更多复杂场景的高精度定位的需求。同时,可以提高算法可靠性,当然最关键是价格比较低。
为什么要提多源融合?在杜洪伟看来,主要有三大方面的优势:
一是每种传感器都有自己的缺点,多源融合在一起,每个传感器的优势可以实现互补,可以满足更多复杂场景的高精度定位的需求。
二是多传感器的数据,因为数据冗余度比较多,所以可以通过计算输出的定位结果的置信度。当前所有的定位方案里面,定位结果都缺少置信度的数据,而置信度是可以很好辅助自动驾驶做决策的。如果只是给自动驾驶大脑提供数据,让决策层决策,是不能很好的服务自动驾驶,定位结果的置信度也是一个关键性的指标。
三是采用多源数据融合的解决方案,避免单节点的故障导致的数据失效,可以更进一步的提高自动驾驶的安全性。
基于多源融合,星舆科技提出了更多的完善方案,一是基于卫星的RTK技术。当前很多基于卫星的方案,单点定位精度是5-20米的精度,如果要基于RTK技术可以提高到厘米级。
基于RTK的技术,重点解决空旷和半遮挡环境下的高精度定位,遮挡下的高精度定位需要用其他的技术方案补充,比如说机器视觉,SLAM技术来解决遮挡定位技术。
还有就是基于高精度地图,结合了机器视觉识别,和地图匹配的技术,来完成相对定位的目的,同时结合地图数据也可以解决遮挡或者全场景下的高精度定位。
目前,基于卫星的导航系统总是存在一些固有的弱点。GNSS信号较弱,不能穿透多层停车场、隧道等建筑物,密集楼宇区存在反射率和卫星能见度问题。其他潜在的问题包括易受有意和无意信号干扰的影响。
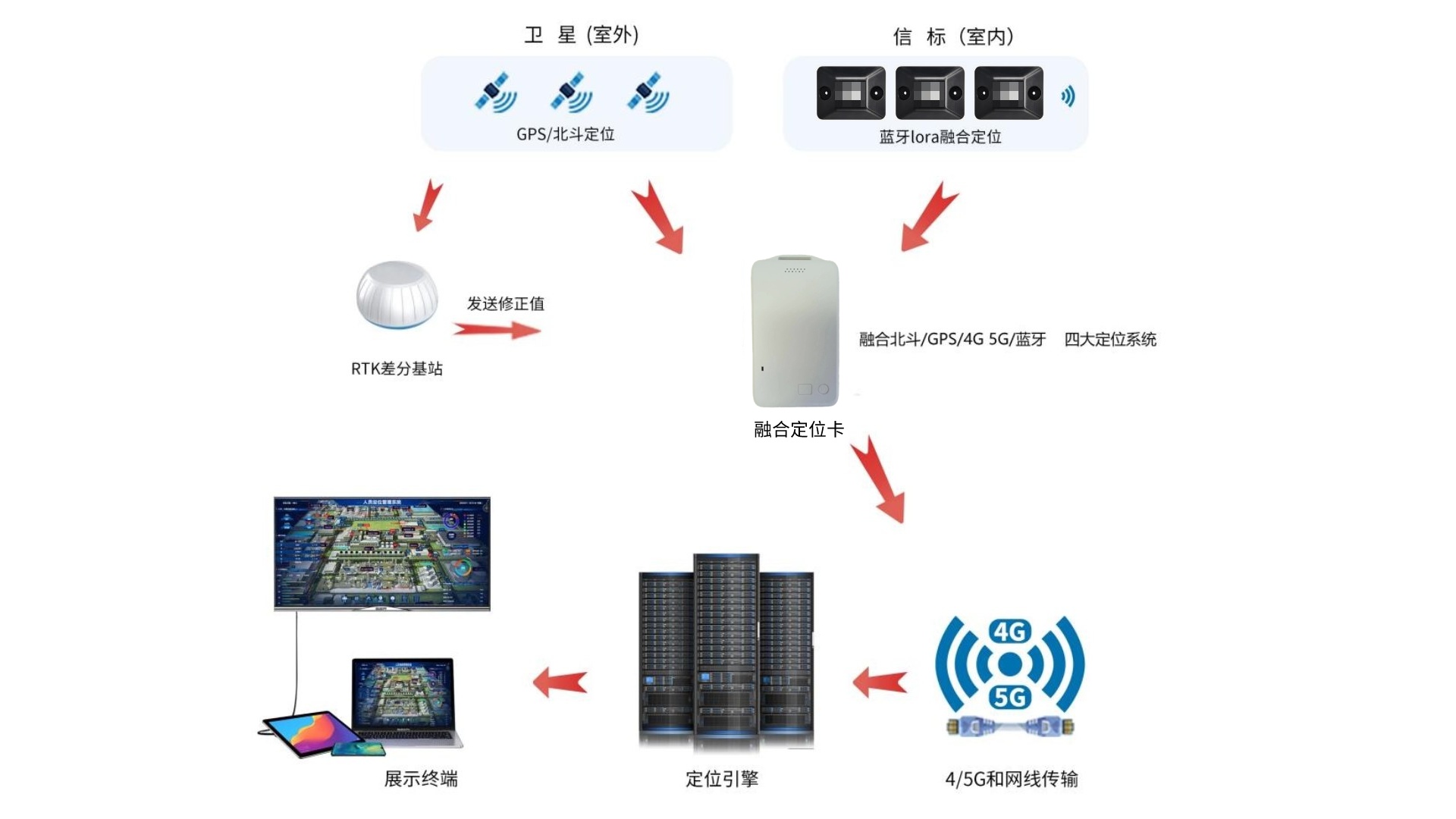
这些潜在的问题可以通过与其他定位传感器和高度精确的数字地图的混合来克服,从而实现高精度定位技术最终能够在室内外环境中移动时提供无缝定位功能。
四、北斗高精度定位网络+融合定位
此前,国家发改委的公布信息显示,国家已启动国家智能汽车创新发展战略起草工作,其中,北斗高精度定位将作为重点领域的核心技术之一,进行重点支持和突破,以满足高级别智能汽车的应用要求。
星舆科技正是依托北斗高精度网络,在全国范围内部署自主研发的智能观测站,构建覆盖全国的高精度定位网络,使得基于卫星的定位方案可达到厘米级。
普通的GPS或北斗定位,只需看到4颗卫星,高精度定位,需要看到至少8颗卫星。在亚太地区,北斗比GPS更有优势,因为在亚太地区,北斗卫星远多于其他的导航系统,网眼最密处在中国上空,卫星数提升、卫星更加密集、通过卫星定位更加稳定可靠,加上北斗三号将于2020年实现全球组网,届时优势会更明显,到2020年,在中国上空,同时存在北斗二号、北斗三号、GPS、伽利略、格洛纳斯,可同时用于高精度定位。
此外,北斗使用三频信号,GPS是双频信号,三频比双频有更高的可靠性和抗干扰能力,北斗兼容GPS和其他导航系统,还可以辅助提高定位精度。因此,综合来看,中国有北斗,中国基于卫星定位的高精度技术应用环境会更好。
当前星舆的北斗高精度定位网的覆盖范围包括广东、湖南、湖北、长三角,京津冀等国内主要核心省市,在未来一年内将覆盖全国重点城市区域。
依托北斗高精度定位网络和先进的融合定位算法,星舆科技可以为智能网联汽车提供基于RTK绝对定位坐标参数。
星舆的北斗高精度定位网有三个特点,一是秒级响应。二是支持亿级高并发,三是分布式的部署还有冗余设计,更高程度提高网络可靠性,达到电信级别的可靠性。北斗高精度定位网可服务于高精度定位和众包高精度地图采集,把定位精度提升到厘米级。
基于高精度地图的定位方案,主要是通过识别兴趣点,然后基于兴趣点和高精度地图进行匹配,匹配到相关的兴趣点,通过地图得到兴趣点的先验精确位置数据,最后基于视觉相对定位的原理来计算相机的姿态和相对兴趣点的距离,以此来计算相机的位置。
目前,这种基于高精度地图定位的方案需要高精度地图中添加更多的POI数据,随着POI数据的增加,这种定位技术会更加成熟。
星舆科技于2018年11月份在深圳举办的第二十届高交会上,发布了首款千元级别AI融合定位终端,可以满足全场景全天侯的高精度定位要求。
此外,高精度定位网络也是众包高精度地图方案的刚需。要打造全国高精度地图“一张网”,离不开覆盖全国的高精度定位网。
目前,星舆科技的高精地图方案采用“机器视觉+RTK+IMU”的云端地图实时采集更新技术。除了丰富的道路元素数据信息,不仅有高精度的坐标,还有准确的道路形状,具有每个车道的坡度、曲率、航向、高程、侧倾的数据。
杜洪伟介绍,星舆科技的高精度地图数据采集已经覆盖珠三角,采集端主要是依靠出租车、物流车上搭载的终端(终端体积小,直接安装在前挡风玻璃),采集地图的数据。
同时,星舆科技的所有的地图都是在云端实时更新,地图的精度通过打点采集和多源测量进行验证,定位精度可以做到20厘米级,并且做到室内室外一体化。
杜洪伟介绍,众包高精度地图采集终端结合多源融合定位技术,定位和测量精度均可达到厘米级,采用云端自动化的处理,自动化的程度当前已经达到90%以上,同时星舆科技的相关算法和云端处理还在继续做优化。
-
gps
+关注
关注
22文章
2896浏览量
166310 -
自动驾驶
+关注
关注
784文章
13839浏览量
166556
原文标题:自动驾驶第四只眼:如何实现全场景动态实时厘米级高精度定位 | GGAI头条
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
精讯畅通发布RTK+4G定位模块,开启厘米级定位新时代
巍泰技术高精度 UWB 信标定位系统介绍及应用价值分析
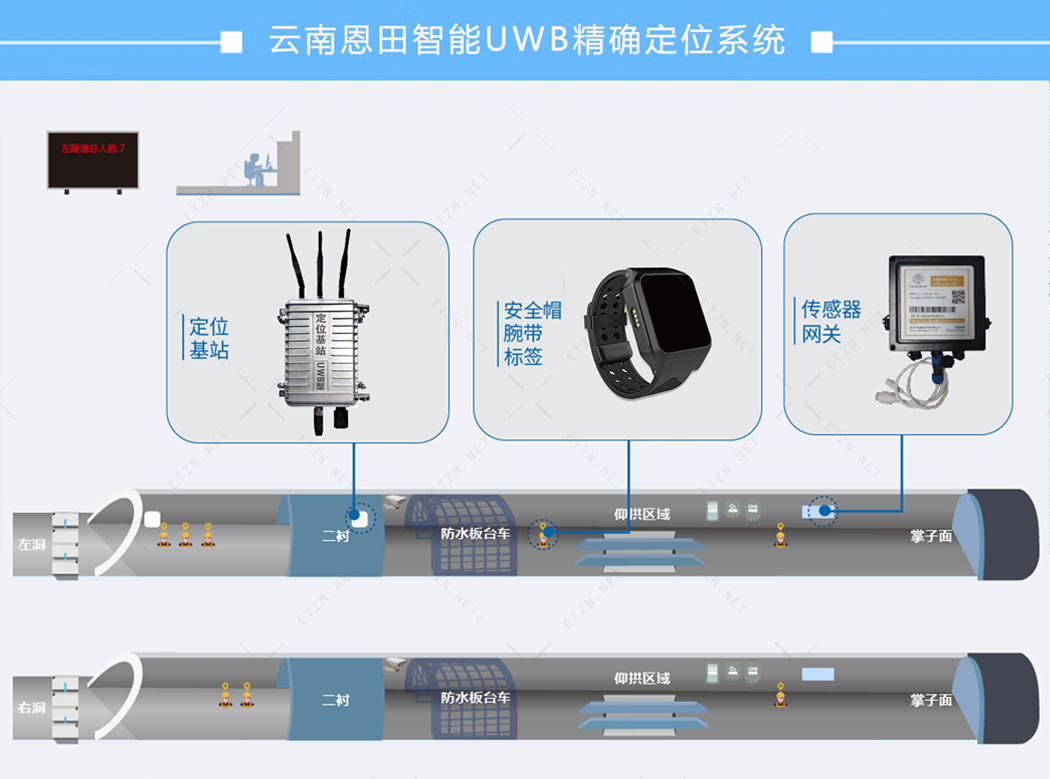
云南恩田隧道 UWB 定位系统应用于隧道场景的高精度定位技术系统
物联网系统中高精度RTK定位方案的实现_高精度定位模块

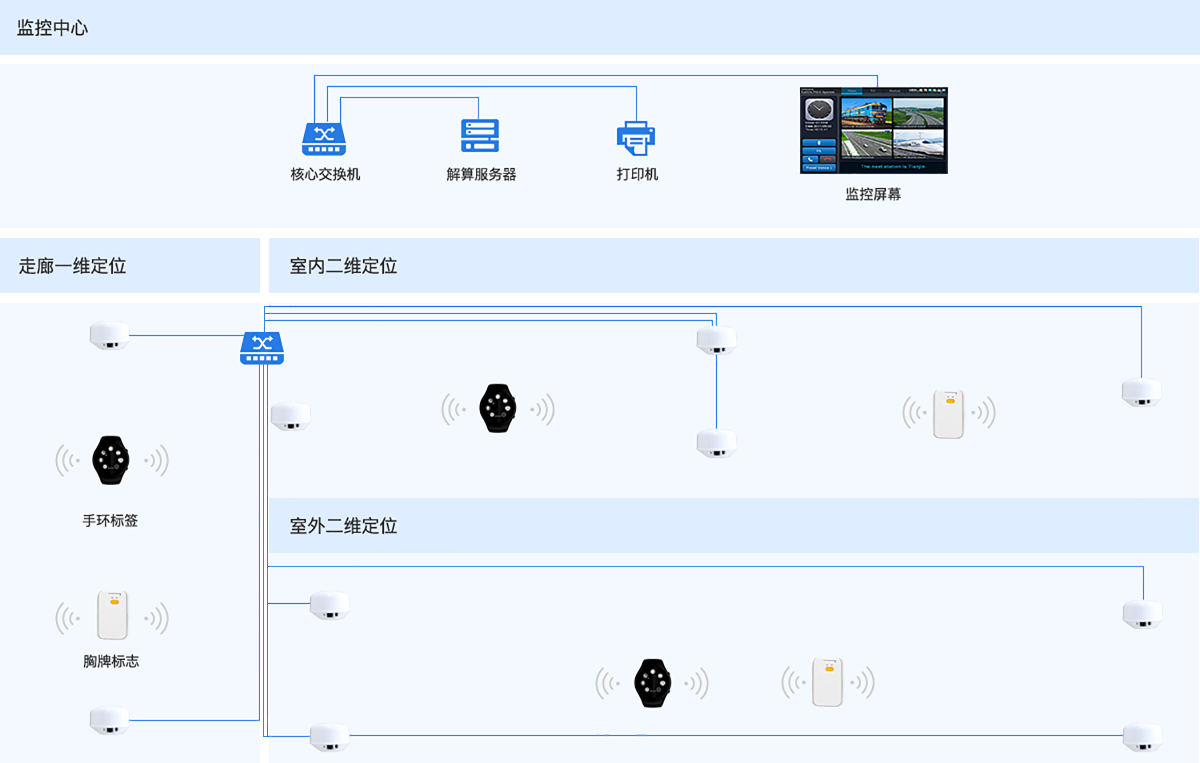
工业制造领域高精度人员定位系统(源码)
北斗RTK高精度定位技术原理、技术优势及应用领域









 工商网监
工商网监
评论