 生病了,吃几个小机器人直接把药送到体内需要的地方
生病了,吃几个小机器人直接把药送到体内需要的地方
也许不久的将来,生病的小伙伴可以吞下一个携带药物的机器人直达患处,将药物精准的释放到靶向组织上。这将大大降低药物的用量,减小毒副作用并加快疾病的康复过程。这并不是遥远的理想,在苏黎世理工和洛桑理工研究人员的努力下,也许这样的机器人将很快来到你我身边。研究人员受到了细菌外形和运动形式的启发,设计出了一款智能、高度灵活并且具有生物兼容性的新型微型机器人。小小的细菌可以适应不同的物理化学环境,充满可塑性的结构可以帮助它们在复杂变化的环境中自由移动。
穿过复杂的结构
穿过狭窄的结构
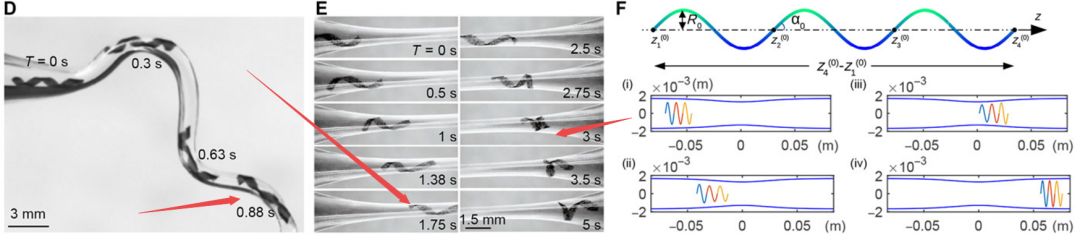
这样神奇的结构为科学家构建微型自动化设备提供了新的思路。这个微小的机器人可以再液体中流动,并可以随着环境的变化改变身形。这意味着它们可以在体内的大多数通道中穿行,可以进入狭窄的静脉和错综复杂的内分泌系统而无需在速度和可操作性上做出妥协,机器人在复杂的环境中从容地穿行。
这种机器人由含有磁性纳米颗粒的水凝纳米复合材料制成,这使得人们可以方便地通过电磁场控制它们的运动和位姿。机器人可以在程序的控制下通过粘稠的液体,或者以较高的速度在流体中运动。研究人员利用线圈和变换的电流创造了一个可操控方向和强度的三维磁场:
在磁场的控制下机器人可以按照不同的方向运动:
制备机器人的过程与我们想象的有很大的不同,这里的机器人没有电机和机械结构,而是使用光刻的方法制备成特殊的结构的。首先设计好需要的结构,并将这些结构摊开成平面结构;随后利用掩膜板和光刻方法将先前设计好的平面结构在含有磁性纳米颗粒的水凝胶复合物中制备出来。最后将这些平面聚合物进行折叠就能得到设计好的三维结构。可以看到不同的掩膜可以制备出不同形状的结构。
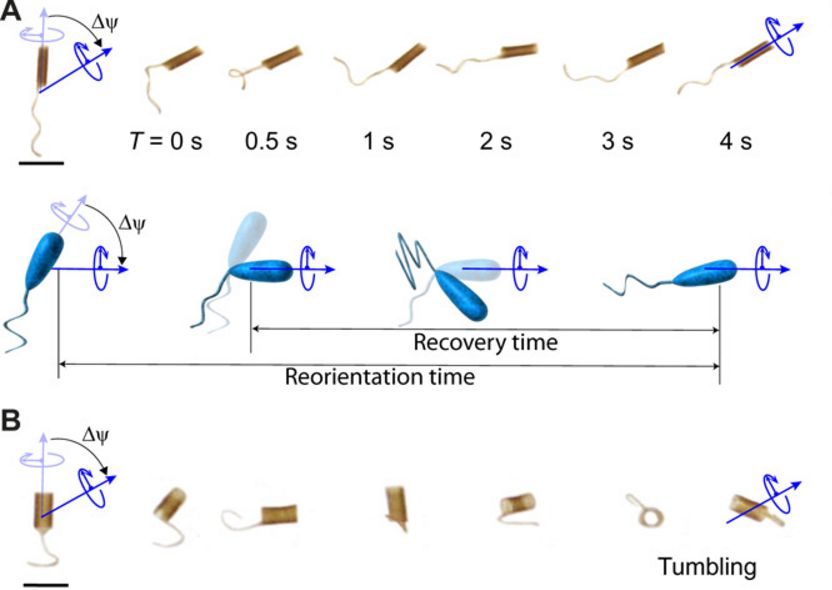
在厚度方向磁性纳米粒子呈现非均分布,并生成了两层膨胀率不同的水凝胶层,不同的膨胀率使得制备过程呈现出子折叠的现象,折叠的曲率与磁性纳米颗粒的含量相关。在样本纸本过程中只需要将其放置在均匀磁场中即可将其中的纳米粒子极化,折叠轴和各向异性的磁场将相互耦合共同影响微型机器人的形态和运动。研究人员主要基于带鞭毛的杆菌、螺旋杆菌和螺旋体三类微生物的构造制造出了不同构型的机器人。在自然条件下,细菌一般通过旋转尾部的鞭毛或者本体来实现移动。可以用下面的模型来描述细菌的运动过程:
研究人员利用了与长轴垂直的变换磁场来驱动微型机器人模拟这种运动。

在流体中运动时,不同的黏度对于机器人的影响各不相同。研究人员发现,对于比较稀的液体长的机器人移动速度较快,而对于比较粘稠的液体越小的机器人受到的阻力越小因而速度也越快。
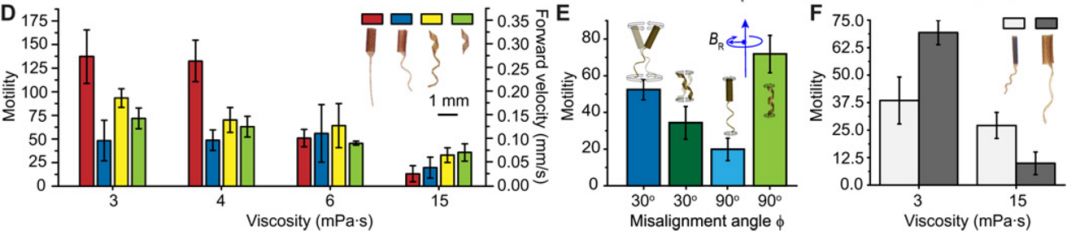
不同黏度中使用了不同的运动步态:

此外,为了控制不同流体中机器人运动的步态,使用了与微型结构长轴有夹角的磁场来控制机器人旋转前行的幅度和步态。这使得机器人可以在不同的运动空间和黏度的流体中顺畅的运动。
还能综合利用结构和流体力学的共同作用,适应不同的结构顺畅穿行。
能屈能伸,可进可退。这种新型的机器人在复杂的体内环境中可以为医学研究和治疗带来诸多的益处。也许在未来,这种微型机器人会发展出被人体直接吸收的无毒无害材料制作,生病真的不用愁了。生病了,吃几个小机器人直接把药送到体内需要的地方。
-
机器人
+关注
关注
211文章
28418浏览量
207082 -
自动化
+关注
关注
29文章
5575浏览量
79272 -
电磁场
+关注
关注
0文章
791浏览量
47267
发布评论请先 登录
相关推荐
机器人餐厅
【Homidea物联网】基于WIFI的远程自动做饭机器人
机器人视觉——机器人的“眼睛”
当前最实用的十大医疗机器人
未来社会为何更需要搬运机器人
中国的机器人发展光明前景
怎么让机器人倒车入库
机器人、协作机器人和移动机器人,你分的清楚吗
使用旅游机器人需要注意哪些问题?
机器人是什么?
轮式机器人怎么样
瑞士开发出在体内运送药物的柔性纳米机器人






 工商网监
工商网监
评论